EXPERIMENTAL STUDY OF HEAT LOSS TUNNEL KILN FOR PRODUCTION OF CERAMIC PRODUCTS BY JSC "ALTAIR"

А. А. Юркевич
Кандидат технических наук, доцент, Ижевский государственный технический университет имени М.Т.Калашникова
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ПОТЕРЬ ТЕПЛОТЫ ТУННЕЛЬНОЙ ПЕЧИ ПО ПРОИЗВОДСТВУ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ ОАО «АЛЬТАИР»
Аннотация
Автором приводятся результаты эксперимента по определению потерь теплоты через тепловую изоляцию туннельной печи по производству керамических изделий ОАО «Альтаир». В качестве инструмента для экспериментального измерения температурных полей наружных поверхностей туннельной печи использовался тепловизор. Приведены мероприятия по энергосбережению энергетических ресурсов при производстве керамических изделий.
Ключевые слова: энергосбережение, тепловая изоляция, температурные поля, промышленность.
A.A.Yurkevich
PhD of Technical Sciences, assosiate professor, Izhevsk State Technical University named MT Kalashnikov
EXPERIMENTAL STUDY OF HEAT LOSS TUNNEL KILN FOR PRODUCTION OF CERAMIC PRODUCTS BY JSC "ALTAIR"
Abstract
The author presents the results of an experiment to determine the heat loss through the thermal insulation of the tunnel kiln for ceramics production of "Altair". As a tool for the experimental measurement of temperature fields of the external surfaces of the tunnel kiln used by the imager. Given energy conservation measures energy resources in the production of ceramic products.
Keywords: energy saving, thermal insulation, thermal field and industry.
Рабочая зона пространственного манипулятора – это пространство, в котором находится его рабочий орган при всех возможных положениях звеньев. Рабочая зона оценивается объёмом формы, которые определяют функциональные возможности манипулятора. Знание границ рабочей зоны необходимо для сравнительной оценки двигательных возможностей манипулятора.

а) б) в)
Рис. 1. Различные положения оригинальной части манипулятора
На рис. 1 представлены различные положения оригинальной части манипулятора: а) длина левого стержня минимальна, а правого максимальна, б) длина правого минимальна, а левого максимальна, в) произвольное положение, когда длина третьего стержня максимальна [1].
1. Придаем обобщенной координате q2 фиксированное значение q2 = 0 и изменяем обобщенную координату q1 в пределах от min до max значений (от 0 до 60º) путем увеличения длины правого стержня от lmin2 =О2О4= 208 мм до lmax2 = О2О4′ =285 мм. Рабочий орган (т.Р) переместится по линии PР′1. При этом, при изменении обобщенной координаты q1, наклонная платформа 4, опорно-поворотное устройство 5 вместе с рабочим столом 8 радиусом R1 = О1О4 = 360 мм в точке О1 повернется против часовой стрелке на угол равный q1, а правый стержень 3 увеличится в длине до О2О′4. Таким образом, траектория точки Р будет дуга окружности радиусом R2 = О1Р =445 мм (рис. 2).
2. Придаем обобщенной координате q1 фиксированное значение q1 = 0, а обобщенную координату q2 изменять в пределах от min до max значений (от 0 до 15º) путем увеличения длины левого стержня от lmin1 = О1О3′ = 208 мм до lmax1 = О1О3″ = 285 мм. Рабочий орган (т.Р1′) переместится по линии Р′1Р″1. При этом, при изменении обобщенной координаты q2, опорно-поворотное устройство 5 вместе с рабочим столом 8 радиусом R3 = О′4О′3 = 297 мм в точке О′4 с повернется по часовой стрелки на угол равный q2, а левый стержень 2 увеличится в длине до О1О″3. Таким образом, траектория точки Р будет дуга окружности радиусом R4 = О′4Р′1 = 237 мм (рис. 2).
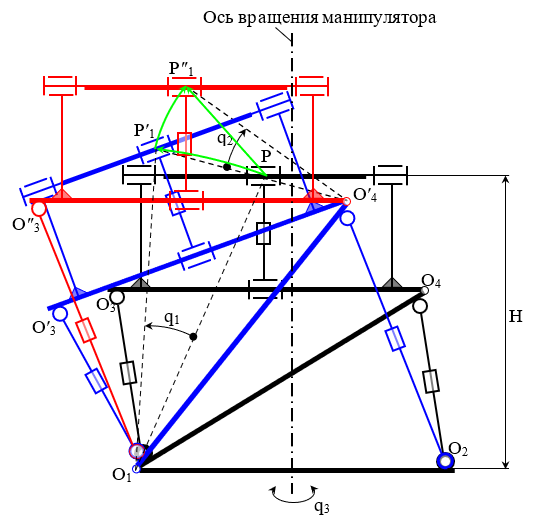
Рис. 2. Построение траектории т. Р при изменении обобщенных q1 и q2 (см. рис. 1, а)).
3. Если изменять сразу, одновременно, обобщенные координаты q1 и q2 в пределах от min до max значений (от 0 до 15º) путем увеличения длин левого и правого стержней от lmin =208 мм до lmax =285 мм, то т. Р переместится от своего min-го до max-го значения влево (Hmin = 436 мм, Hmax = 496 мм). При этом, из геометрических соображений, видно, что траектория т. Р будет прямая линия РР″1 (рис. 2).
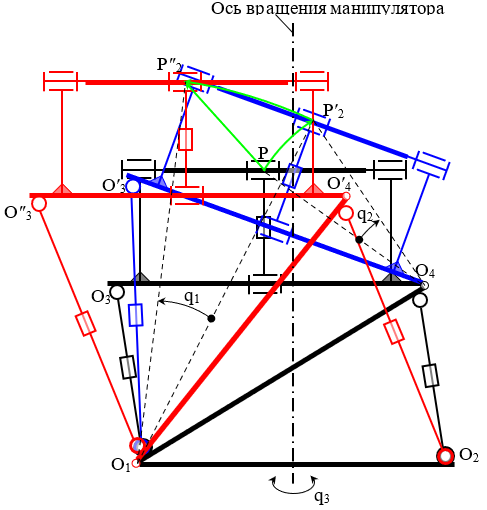
Рис. 3. Построение траектории т. Р при изменении обобщенных координат q2 и q1 (см. рис. 1, б))
4. Придаем обобщенной координате q1 фиксированное значение q1 = 0, а обобщенную координату q2 изменять в пределах от min до max значений (от 0 до 15º) путем увеличения длины левого стержня от lmin1 = О1О3′ = 208 мм до lmax1 = О1О3″ = 285 мм. Рабочий орган (т.Р2′) переместится по линии РР′2. При этом, при изменении обобщенной координаты q2, опорно-поворотное устройство 5 вместе с рабочим столом 8 радиусом R1 = О4О3 = 297имм в точке О4 повернется по часовой стрелки на угол равный q2, а левый стержень 2 увеличится в длине до О1О′3. Таким образом, траектория точки Р будет дуга окружности радиусом R2 = О4Р = 237 мм (рис. 3).
5. Придаем обобщенной координате q2 фиксированное значение q2 = 0, а обобщенную координату q1 изменять в пределах от min до naxзначений (от 0 до 60º) путем увеличения длины правого стержня от lmin2 =О2О4= 208 мм до lmax2 = О2О4′ =285 мм. Рабочий орган (т.Р2′) переместится по линии P2′P2′′. При этом, при изменении обобщенной координаты q1, наклонная платформа 4, опорно-поворотное устройство 5 вместе с рабочим столом 8 радиусом R3 = О1О4 = 360 мм повернется против часовой стрелки на угол равный q1, а левый стержень 2 увеличится в длине до О1О″3. Таким образом, траектория точки Р будет дуга окружности радиусом R4 = О1Р′2 = 490 мм (рис. 3).
Таким образом, получили два криволинейных треугольника: РР′1Р″1 и РР′2Р″2. Ясно, что итоговая рабочая зона (в плоскости) будет представлять собой фигуру, образованная совмещением этих двух криволинейных треугольников, т.е. будет криволинейный четырехугольник РР′1Р″2Р′2, (Р″1 ≡ Р″2) (рис. 4).
Обобщенная координата q3 – это угол поворота (вращение) оригинальной части манипулятора вокруг оси вращения манипулятора. Тогда рабочая зона оригинальной части манипулятора, которая может вращаться вокруг вертикальной оси, будет представлять собой тело вращения, а именно торообразную пространственную фигуру (рис. 5). Используя пакет программы KOMPAS 3D - V12 изобразим вид получившейся рабочей зоны данного макета манипулятора (рис. 6).
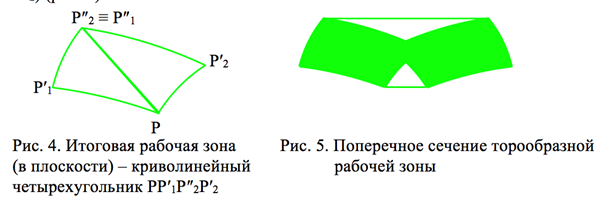
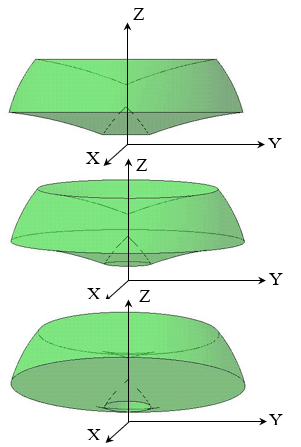
Рис. 6. Вид спереди рабочей зоны исследуемого макета манипулятора при различных углах поворота относительно оси Y, когда сечения пересекаются
В зависимости от того как будет расположена половина поперечного сечения рабочей зоны в плоскости, т.е. криволинейный четырехугольник РР′1Р″2Р′2 возможны ещё два вида конфигурации рабочей зоны манипулятора, а именно: а) криволинейные сечения касаются друг друга в т.Р′2 при вращении (рис. 7, а)) и когда они не пересекаются (рис. 7, б)):
ВЫВОДЫ:
1. Рабочее пространство оригинальной части манипулятора является торообразной фигурой вращения, крайние точки которой достигаются центром подвижной платформы при ее поступательном и вращательном движениях относительно основания.
2. Для обеспечения поворота подвижной платформы в крайних положениях, относительно осей OY′ – оси ОY повернутой на угол q1 или q2 относительно горизонтали, необходимо увеличение (уменьшение) длины третьего стержня, соединяющего рабочий стол с опорно-поворотным устройством.
3. На размеры рабочей зоны существенное влияние оказывают ограничения, накладываемые угловыми перемещениями в шарнирах, чем они меньше, тем меньше габаритные размеры рабочей зоны при тех же пределах изменения длин левого и правого стержней.
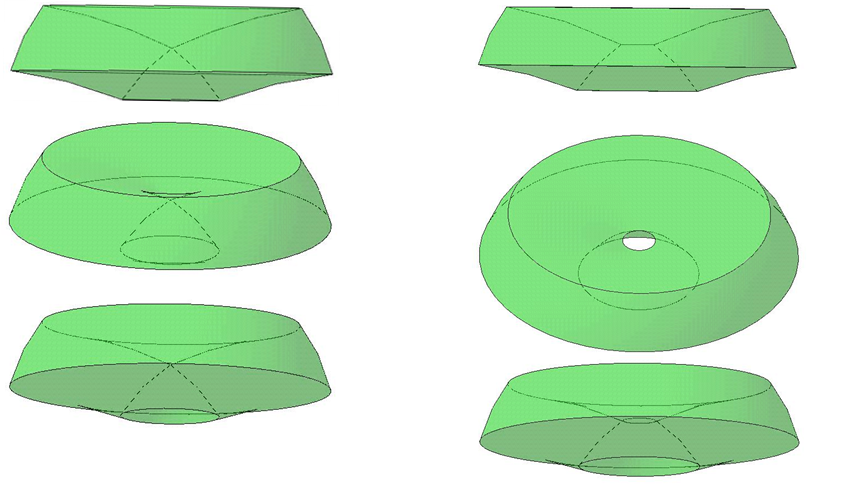
а) б)
Рис. 7. Вид спереди рабочей зоны манипулятора при различных углах поворота относительно оси Y
Литература
1. Балакин П.Д., Шамутдинов А.Х. Схемное решение механизма шестикоординатного манипулятора / Международный научно-исследовательский журнал / учредитель журнала: ИП Соколова М.В. − 2013, июль − Екатеринбург: ООО «Имплекс», Ч.1, №6(13) − С.97-99. ISSN 2303-9868. 900 экз.