DIRECT AND INVERSE PROBLEMS KINEMATICS OF THE ORIGINAL PART OF THE MANIPULATOR OF SIX-DEGREE-OF-FREEDOM

Балакин П. Д.1, Шамутдинов А. Х.2
1Доктор технических наук, профессор, заведующий кафедрой ТММ; 2Старший преподаватель кафедры ТММ.
Омский государственный технический университет
ПРЯМАЯ И ОБРАТНАЯ ЗАДАЧИ КИНЕМАТИКИ ОРИГИНАЛЬНОЙ ЧАСТИ ШЕСТИКООРДИНАТНОГО МАНИПУЛЯТОРА
Аннотация
Геометрически решена прямая задача кинематики, а при q1 = q2 − обратная задача кинематики оригинальной части шестикоординатного манипулятора.
Ключевые слова: манипулятор, абсолютная система координат, обобщенные координаты, рабочий орган манипулятора.
Balakin P.D. 1, Shamutdinov A.H. 2
1Doctor of Technical Sciences, Professor, Head of Department of TMM; 2Senior teacher of faculty of TMM.
DIRECT AND INVERSE PROBLEMS KINEMATICS OF THE ORIGINAL PART OF THE MANIPULATOR OF SIX-DEGREE-OF-FREEDOM
Abstract
Geometrically solved by kinematics of the direct problem, and if q1 = q2 - inverse kinematics problem of the original part the manipulator of six-degree of freedom.
Keywords: the manipulator, the absolute system of coordinates, the generalized coordinates, the working body of the manipulator.
Прямая задача для манипулятора – это вычисление положения (xр, yр, zр) рабочего органа манипулятора по его кинематической схеме и значениях обобщенных координат (q1, q2… qn) , где n – число степеней свободы манипулятора, qi – обобщенные координаты.
Обратная задача – это вычисление величин обобщенных координат (q1, q2… qn) по заданному положению (xр, yр, zр) рабочего органа при известной схеме кинематики манипулятора.
Прямую задачу кинематики манипулятора [1] будем решать геометрически. Для этого изобразим кинематическую схему манипулятора, обобщенные координаты его звеньев qn, их длины ln и привяжем к манипулятору абсолютную (неподвижную) систему координат (X,Y,Z), обозначив координаты рабочего органа xр, yр, zр (рис. 1).
Обозначения на рис. 1: (X,Y,Z) – абсолютная (неподвижная) система координат; Р – точка, где находится рабочий орган (заготовка, инструмент) на рабочем столе; P′ – положение рабочей точки Р при вращении блока звеньев (2, 4 – 8) вокруг оси параллельной оси X в т. О1; P′′ – положение рабочей точки Р при вращении блока звеньев (2, 5 – 8) вокруг оси параллельной оси X в т. О4′′= О4′′′; (x,y,z) – координаты т. Р; (x′,y′,z′) – координаты т. Р′; (x′′,y′′,z′′) – координаты т. Р′′; (xр, yр, zр) – координаты т. Р′′′; O1P′∙= O1P = lp; O4′P′ = O4′P′′ = O4P = lp′; O1O4′ = O1O4 = b.
Позиции на рис. 1: 1 − Поворотный стол; 2 − Левый стержень (двигатель поступательного перемещения); 3 − Верхний стержень (двигатель поступательного перемещения); 4 – Опоры; 5 – Рабочий стол; 6 − Опорно-поворотное устройство; 7 − Наклонная платформа; 8 − Правый стержень (двигатель поступательного перемещения).
Последовательность поворотов стержней 2 и 3 не меняет итоговое положение рабочего стола 8. По аналогии видно, что последовательность поворотов стержней 2, 3 и поворотного стола 1 также не изменяет итогового положения рабочего стола 8. Поэтому будем изменять, например, положение, сначала стержня 3, потом стержня 2 и потом положение поворотного стола 1.
По заданным обобщенным координатам найдем положение точки P рабочего органа. Из рис. 1 видно, что первоначальные координаты т.Р будут:
x = 0, y = – l3∙cos β; z = H
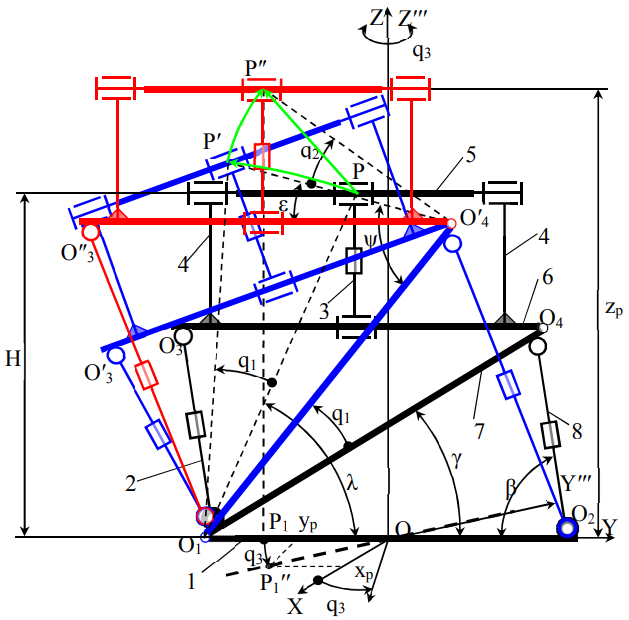
Рис. 1. Кинематическая схема манипулятора
При изменении обобщенной координаты q1 (повороте) т. Р займет положение Р′. Представим вращение треугольника O1P′P вокруг начала координат О: сначала нужно его повернуть против часовой стрелки на угол q1, а потом параллельным переносом по оси Y сместить влево на величину а/2 (рис. 2). Из рис. 2 видно:
x′ = 0, y′ = O1P′∙cos(q1 + λ) – a/2, z = O1P′∙sin(q1 + λ)
или x′ = 0, y′ = lp′∙cos(q1 + λ) – a/2, z = lp′∙sin(q1 + λ),
где λ – угол наклона линии O1P относительно горизонтали.
При изменении обобщенной координаты q2 (повороте) т. Р′ займет положение Р′′. Представим вращение треугольника O4′P′P″ вокруг начала координат О: сначала нужно его повернуть по часовой стрелки на угол q2, потом параллельным переносом сместить вправо на величину y1 и наконец
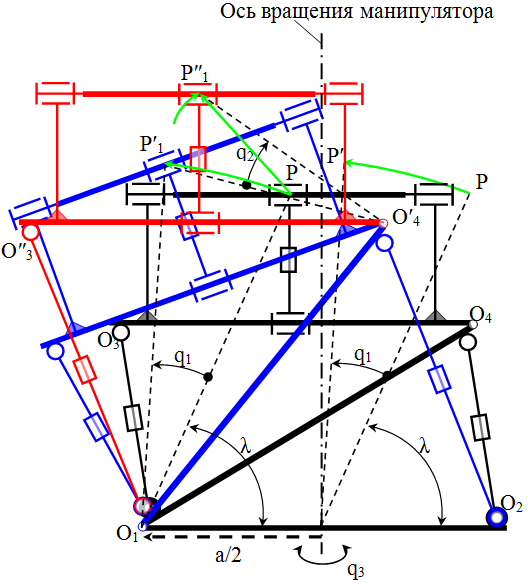
Рис. 2. Поворот манипулятора на угол q1
параллельным переносом по оси Z переместить вверх на величину h1 (рис. 3):
x′′ = 0, y′′ = – O4′P′′∙cos(q2 + ε) + x1, z′′ = O4′P′′∙sin(q1+ε) + h1
или x′′ = 0, y′′ = – lp′∙cos(q2+ε) + x1, z′′ = lp′∙sin(q2 + ε) + h1,
где ε – угол наклона линии O4′P′∙относительно горизонтали,
x1 = b∙cos(q1 + γ) – a/2, h1 = b∙sin(q1 + γ)
Из треугольника О1Р′О4′ (рис. 1) по известной теореме находим:
O1P′2 = O4′P′2 + O1O4′2 – 2O4′P′∙O1O4′∙cos ψ или lp2 = lp′2 + b2-2b∙lp′∙cos ψ, откуда
 . Из рисунка видно, что ε = ψ - q1- γ
. Из рисунка видно, что ε = ψ - q1- γ
При вращении манипулятора (системы XYZ) вокруг оси Z ≡ Z′′′ (рис. 1) координаты т.Р′′′ будут: xр = y′′ sinq3, yр = y′′∙cosq3, zр = z′′.
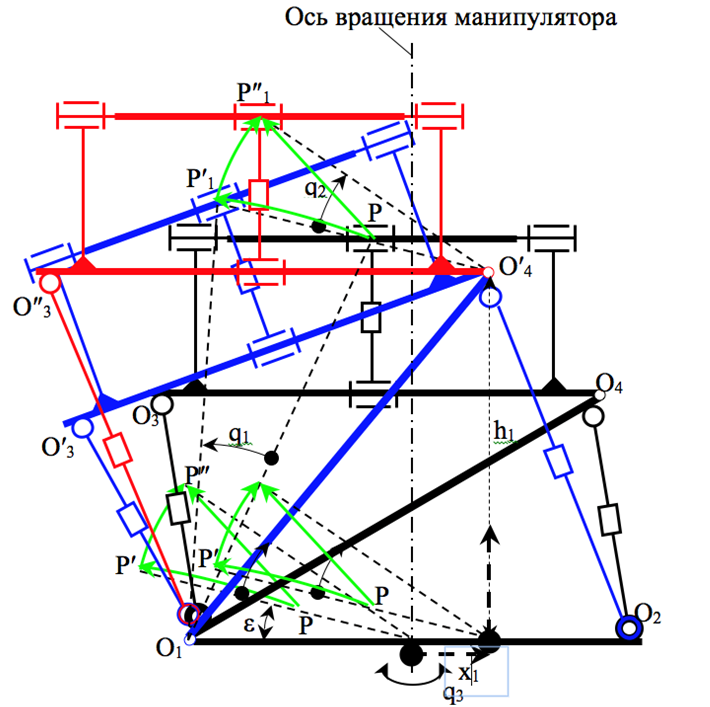
Рис. 3. Поворот манипулятора на угол q2
Окончательно можно записать:
xp = [- lp′∙cos(q2 + ψ – q1 – γ) + b∙cos(q1+γ) – a/2]∙sinq3,
yp = [- lp′∙cos(q2 + ψ – q1 – γ) + b∙cos(q1+γ) – а/2]∙cosq3, (1)
zp = lp′∙sin(q2+ ψ – q1 – γ) + b∙sin(q1+γ).
Таким образом, прямая задача кинематики для данного манипулятора – решена, что позволяет определить положение рабочего органа манипулятора при заданных значениях обобщенных координат для любого момента времени.
Из соотношений (1) видно, что решение обратной задачи в явном виде невозможно. Для нашего случая, когда q1 = q2, для итогового положения рабочего органа манипулятора решение обратной задачи не представляет сложности. Запишем соотношения (1) при q1 = q2:
xp = [- lp′∙cos(ψ – γ) + b∙cos(q1+γ) – a/2]∙sinq3,
yp = [- lp′∙cos(ψ – γ) + b∙cos(q1+γ) – a/2]∙cosq3, (2)
zp = lp′∙sin(ψ – γ) + b∙sin(q1+γ).
Из первых двух уравнений имеем:
Из третьего уравнения находим:

Окончательно запишем:
 (3)
(3)
ВЫВОДЫ:
- Для исследуемой схемы механизма манипулятора аналитически решена прямая задача кинематики (1), что позволит, для каждого момента времени, определить положение исполнительного органа манипулятора и выбрать схему нагружения для определения усилий, действующих на манипулятор.
- При q1 = q2 – решена обратная задача кинематики (3);
- Эти задачи могут быть решены и при иных условиях или модификациях схемы.
References
Балакин П.Д., Шамутдинов А.Х. Схемное решение механизма шестикоординатного манипулятора / Международный научно-исследовательский журнал / учредитель журнала: ИП Соколова М.В. − 2013, июль − Екатеринбург: ООО «Имплекс», Ч.1, №6(13) − С.97-99. ISSN 2303-9868. 900 экз.
References
Балакин П.Д., Шамутдинов А.Х. Схемное решение механизма шестикоординатного манипулятора / Международный научно-исследовательский журнал / учредитель журнала: ИП Соколова М.В. − 2013, июль − Екатеринбург: ООО «Имплекс», Ч.1, №6(13) − С.97-99. ISSN 2303-9868. 900 экз.