DEVICE TO WARN DRIVERS ABOUT THE DANGEROUS MOVEMENT OF THE VEHICLE

Алпатов А.В. 1, Кирюхин А.В. 2
1Кандидат технических наук, доцент, 2аспирант, Рязанский государственный радиотехнический университет
УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ВОДИТЕЛЯ ОБ ОПАСНОМ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА
Аннотация
В статье рассмотрены причины высокого уровня дорожно-транспортных происшествий, критерии опасного вождения, особенности алгоритма Лукаса-Канаде, особенности построения классификатора на основе методов нечеткой логики.
Ключевые слова: опасное вождение, нечеткая логика, алгоритм Лукаса-Канаде.
Alpatov A.V. 1 , Kiryukhin A.V. 2
1PhD in technical sciences, assosiate professor, 2Postgraduate student, The Ryazan State Radioengineering University
DEVICE TO WARN DRIVERS ABOUT THE DANGEROUS MOVEMENT OF THE VEHICLE
Abstarct
The reasons for a high level of traffic accidents, the criteria for dangerous driving, suggested with the usage of the Lucas-Kanade algorithm, the features of the construction of the classifier based on the fuzzy logic method, considers the given article.
Keywords: dangerous driving, fuzzy logic, Lucas-Kanade algorithm.
Presently transport risks in Russia are characterized by the indicator of 6.6 deaths for 10 thousand motor vehicles, while in the1990s and 2000s the amount has been estimated as 1 death in the global practice, and by now lots of developed countries have reduced this rate to less than 1 death for 10 thousand cars. The current statistics shows that the situation on the roads in Russia is in a compelling need of significant improvement.
Unfavorable traffic conditions are brought about by several reasons. The practice of the foreign developed countries evidences that the main cause for the high level of car accidents is not driving a vehicle while being intoxicated or drugs-affected, but so-called «dangerous driving». It is characterized by the following features:
- driving at a high speed or aggressive driving;
- hazardous overtaking and lane changes;
- driving in an improper condition, including the presence of various traumas, the driver’s inability to see clearly, drugs affection or drowsiness;
- distraction from driving due to the use of cell-phones or other equipment in the hands, reading or viewing maps, talking to the passengers, smoking or tuning up a car stereo [1].
The objective of the present project is to increase the traffic safety of a vehicle and to alert drivers for situations, triggered off by their dangerous driving.
The solution of this goal consists of several tasks, in particular:
- to define a vehicle movement in a traffic flow;
- to determine distances to the traffic participants;
- to specify the driver’s actions;
- to estimate the state of the driver;
- to execute the consolidated assessment of the danger, possible actions and reactions of the driver, to elaborate a prognosis and recommendations.
In this regard, it is suggested to use a special complex device containing a video camera attached to the windshield, speeding-up detectors fixed on the controls (steering wheel, foot pedals), GPS speed transmitter, and a heart rate sensor, fastened to the driver’s earlobe (Pic. 1).
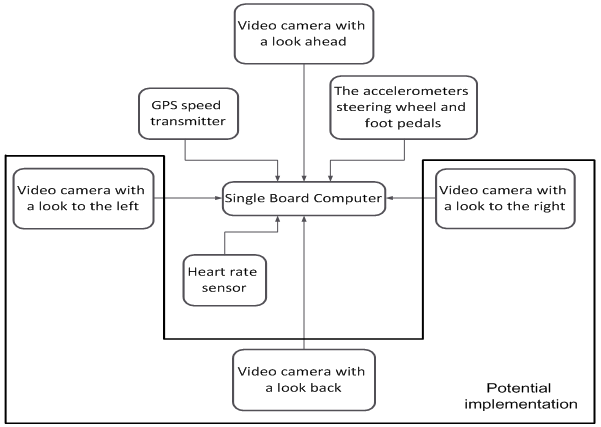
Picture 1 - Device to warn drivers about the dangerous movement of the vehicle
A video camera which monitors the traffic flow is considered to be the primary component of the system. A distinctive feature of the registration and video analysis is determination of the vehicle movement in a traffic flow, which gives a detailed information about the possibility of sudden and unexpected lane changes, overtakings, driving in the oncoming lane, etc.
Thus, to accomplish the assigned task a number of experiments have been performed with a real motor vehicle. In the process of the vehicle movement have been recorded a traffic video, speed of the vehicle and the driver’s pulse. Next, the usage of the graphic programming LabVIEW medium makes it possible to analyze the data obtained. For the quantitative description of the dangerous driving the following criteria have been put forward (Table 1).
Table 1 - Criteria for dangerous driving
|
Driving Option |
Valid value |
|
1. The number of lane changes per minute |
more than 5 |
|
2. Driving into the oncoming traffic |
1 - 0,2 time in a minute |
|
3. The intensity of the speed slowdown |
more than 3 meters per second2 |
|
4. The intensity of speeding-up |
more than 3 meters per second2 |
|
5. ABS system response in each slowdown (brake pedal flap) |
|
|
6. The maximum permissible distance to the vehicle at a speed of 100 km/h |
2 seconds
|
|
7. The number of pulse growths for more than 80% in relation to the conventional norm (average for 20 minutes) |
within 3 seconds |
|
8. The number of drops in the heart rate for 80% (within 3 seconds) |
within 5 minutes |
|
9. Ratio of LF to HF |
>> 2 within 5 minutes |
|
10. The value of the scaling pulse index DFA |
> 1,6 within 5 minutes |
|
11. The monotonous increase of the pulse values (within 30 seconds) |
within 5 minutes |
The Lucas-Kanade algorithm has been put to use in order to control the 1st and the 2nd criteria of the analysis. In computer vision, the Lucas–Kanade method is a widely used differential method for optical flow estimation developed by Bruce D. Lucas and Takeo Kanade. It assumes that the flow is essentially constant in a local neighbourhood of the pixel under consideration, and solves the basic optical flow equations for all the pixels in that neighbourhood, by the least squares criterion.
By combining information from several nearby pixels, the Lucas–Kanade method can often resolve the inherent ambiguity of the optical flow equation. It is also less sensitive to image noise than point-wise methods. On the other hand, since it is a purely local method, it cannot provide flow information in the interior of uniform regions of the image [2].
The registered curve pulse has been transmitted to the module, based on the microcontroller MEGA32U4 and then recorded in the SD memory card. After that, the received rhythmogramm has been analyzed by the geometrical methods, methods of spectrum analysis and nonlinear methods (Pic. 2).
As the estimation of dangerous driving is stated to be multifactorial, it is appropriate to set up a classifier in order to display an integrated quantitative result.
For this purpose, it was concluded to use the tools of fuzzy logic and fuzzy sets, which is widely known as a device of artificial intelligence. The mathematical theory of fuzzy sets and fuzzy logic are generalizations of the classical set theory and classical formal logic.

Picture 2 - Analysis of rhythmogramm with the nonlinear method of DFA (Detrended Fluctuation Analysis)
These concepts were for the first time proposed by Lotfi Zadeh, an American scientist, in 1965. The main reason for the emergence of a new theory became vague and approximate arguments while describing processes, systems, and objects [3].
At this stage the most significant and valuable criteria for dangerous driving have been examined to determine the mutual influence of the factors on the outcome. In the coming future it is planned to increase their number. It is worthwhile noting that fuzzification, defuzzification, fuzzy inference, and the rule base have been designed in a way preventing the system from working out for a single option, even though its value is maximum. The system «beats an alarm» or gives a warning about the traffic danger only in case any three or more criteria trigger simultaneously.
This method improves the reliability and quality of the system operation. Picture 3 demonstrates the fragments of the classifier modeling to specify the criteria for dangerous driving.
As similar systems existing in the foreign production are mostly installed in expensive motor vehicles and are not provided as a separate unit, then the development of a low-cost domestic analogue for the car of economy class seems to be very promising. The experience of foreign countries has revealed the fact that dangerous driving, including negligent driving, turns out to be the main factor of the high level of traffic accidents.
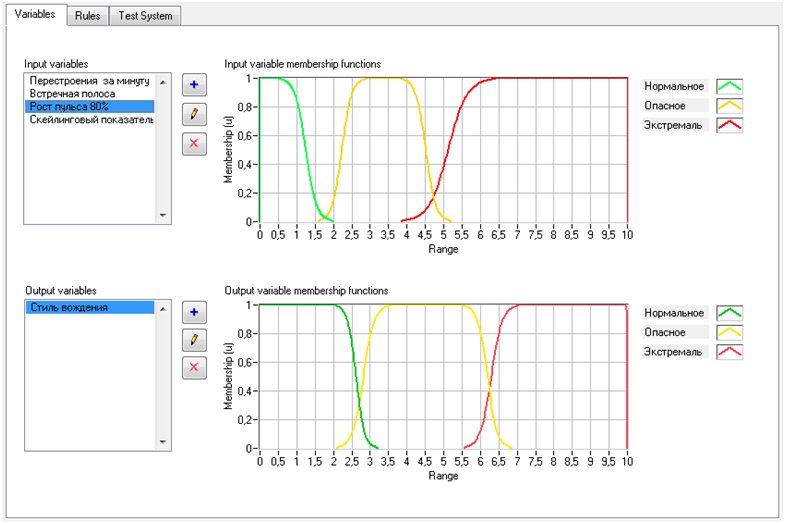
Picture 3 - Building of the input and output membership functions in LabVIEW 2010
Consequently, in our country a regulatory framework is currently being developed to legitimize the issue. The perspective of the presented project consists in a more detailed elaboration of the classifier, an explicit analysis of accelerometer sensors data of the operating controls, as well as installation of 3 additional cameras in the car: looking left, right and backwards.
References
Driving offences involving death [Web resource]. - Mode of access: http://www.cps.gov.uk/news/fact_sheets/dangerous_driving/ (date of access 16.08.2013)
Lucas–Kanade method [Web resource]. - Mode of access: http://en.wikipedia.org/wiki/Lucas–Kanade_method (date of access 26.08.2013).
Fuzzy logic - mathematical foundations [Web resource]. - Mode of access: http://www.basegroup.ru/library/analysis/fuzzylogic/math/ (date of access 14.08.2013).
References
Driving offences involving death [Web resource]. - Mode of access: http://www.cps.gov.uk/news/fact_sheets/dangerous_driving/ (date of access 16.08.2013)
Lucas–Kanade method [Web resource]. - Mode of access: http://en.wikipedia.org/wiki/Lucas–Kanade_method (date of access 26.08.2013).
Fuzzy logic - mathematical foundations [Web resource]. - Mode of access: http://www.basegroup.ru/library/analysis/fuzzylogic/math/ (date of access 14.08.2013).