DEVELOPMENT OF A MECHATRONIC MODULE WITH A BALANCING DEVICE AND A ROBOT BASED ON IT

РАЗРАБОТКА МЕХАТРОННОГО МОДУЛЯ С УРАВНОВЕШИВАЮЩИМ УСТРОЙСТВОМ И СОЗДАНИЕ РОБОТА НА ЕГО ОСНОВЕ
Научная статья
Головин М.А.1, *, Шестаков К.Д.2, Сафаров В.Д.3
1 ORCID: 0000-0002-7063-1284;
1, 2, 3 Санкт-Петербургский политехнический университет Петра Великого, Санкт-Петербург, Россия;
1 Федеральный научный центр реабилитации инвалидов им Г.А. Альбрехта Министерства труда и социальной защиты Российской Федерации, Санкт-Петербург, Россия;
* Корреспондирующий автор (muxagolovin[at]gmail.com)
АннотацияИспользование инвалидного кресла-коляски оператором приводит к компенсаторным движениям корпуса. В ходе исследования предложена конструкция мехатронного модуля шасси инвалидного кресла-коляски для стабилизации сиденья (платформы) и система управления стабилизацией относительно угла к горизонту. Для получения точного сигнала отклонения сиденья используются датчики расстояния и инерциальное измерительно устройство. Разработана методика расчета пружины пружинного аккумулятора и кинематическая модель мехатронного модуля и робота. Показано, что использование нелинейного пружинного аккумулятора с синусной моментной характеристикой на базе цилиндрических пружин приводит к уменьшению затрат энергии при стабилизации.
Ключевые слова: робот, стабилизация, пружинный аккумулятор.
DEVELOPMENT OF A MECHATRONIC MODULE WITH A BALANCING DEVICE AND A ROBOT BASED ON IT
Research article
Golovin M.A.1, *, Shestakov K.D.2, Safarov V.D.3
1 ORCID: 0000-0002-7063-1284;
1, 2, 3 Peter the Great St. Petersburg Polytechnic University, St. Petersburg, Russia;
1 Federal Scientific Center of Rehabilitation of the Disabled named after G.A. Albrecht of the Ministry of Labour and Social Protection of the Russian Federation, St. Petersburg, Russia
* Corresponding author (muxagolovin[at]gmail.com)
AbstractThe manual use of a wheelchair leads to compensatory movements of the body. The article proposes a design of the mechatronic module of wheelchair chassis for seat (platform) stabilization and a stabilization control system relative to the angle to the horizon. To obtain an accurate signal of seat inclination, distance sensors and an inertial measuring device are used. The study also introduces a method for calculating the spring of a spring accumulator and a kinematic model of a mechatronic module and a robot. It is shown that the use of a nonlinear spring accumulator with a sine moment characteristic based on cylindrical springs leads to a decrease in energy costs during stabilization.
Keywords: robot, stabilization, spring accumulator.
ВведениеМобильность лиц с ограниченными возможностями здоровья (ОВЗ) в XXI веке является острой проблемой в условиях возрастающей урбанизации [1, С. 104]. Для ее решения проводится адаптация существующей городской инфраструктуры с целью повышения мобильности [2, С. 67]. В то же время, например, не существует инвалидных кресел-колясок, которые предназначены для самостоятельного движения на эскалаторах, часто встречаемых в городском пространстве.
Лицам с ОВЗ для компенсации нарушений опорно-двигательного аппарата могут назначаться соответствующие технические средства реабилитации, такие как - трости, протезы, инвалидные кресла-коляски и др. Кресла-коляски могут иметь электропривод, а также источник энергии, преобразователь мощности, микроконтроллер, устройство ввода, мотор и редуктор. Прогулочные коляски предназначены для перемещения не только в помещении, но и на улице, поэтому важно, чтобы кресло-коляска имела удобную и надежную систему управления.
Для повышения комфорта при движении на колесном транспортном средстве по неровной поверхности предложены различные технические решения. Однако, только небольшое количество электрических инвалидных колясок пригодно для полноценного самостоятельного использования инвалидами в городской среде, в частности – из-за отсутствия систем очувствления [3, С. 64]. Большинство инвалидных колясок подходят только для перемещения по поверхностям с малыми углами въезда и съезда – до 100.
Стабилизация сиденья ИКК при перемещении по неровным поверхностям и лестницам является предметом большого количества исследований [4, С.90], [5, С.243], [6, С.81]. Отдельно рассматриваются различные компоненты подобных систем [7, C. 96]. При этом практически не уделяется внимания вопросу организации меньшего потребления энергии при их эксплуатации. Применение в системе стабилизации компенсатора способно обеспечить экономию энергии и позволит повысить запас хода.
Медико-социальный эффект результата работы заключается в обеспечении лиц с ОВЗ более комфортными и безопасными средствами передвижения на эскалаторах и пандусах без необходимости совершать физиологические движения компенсации. Практическим результатом исследования является макет робота (инвалидной коляски).
Применение результатов в практике медицинской реабилитации возможно для повышения мобильности пользователей в условиях продолжающейся урбанизации. Например, в Санкт-Петербурге и Москве на каждой станции метрополитена дежурит специальная команда сотрудников, для оказания помощи маломобильной категории граждан. Разработка подобных систем сможет уменьшить нагрузку на региональные бюджеты.
Цель работы – разработка мехатронного модуля с поступательным движением исполнительного механизма и рекуперацией энергии и робота на его основе.
Методы и принципы исследования
При проведении исследования были использованы методы объектно-ориентированного взаимодействия человека и ЭВМ, методы цифровой электроники, принципы проектирования мехатронных устройств и методы структурного программирования. Робот построен на базе платформы Arduino. Измерение нагрузки проводилось с использованием платформы MyDAQ, NI, и датчика тока LA 55-P в ПО LabView 2019. Модель построена в среде Simulink, Matlab.
Объект изучения: шасси инвалидного кресла-коляски. Предмет изучения: стабилизация сиденья при движении по неровным поверхностям и в условиях перепада высот между осями.
Основные результаты
Модульный принцип проектирования является основополагающим при проектировании транспортных средств в настоящее время [8, С. 24]. Работа модуля стабилизации заключается в поступательном перемещении выходного звена – мотор-колеса.
Модуль стабилизации с системой уравновешивания представлен на рисунке 1. Уравновешивающее устройство состоит из шарнирно соединенных рычагов 1 и 2 длиной r, образующих двухзвенник:
На раме шарнирно установлен блок О3, на котором запасован гибкий элемент 3, соединенный с пружинами 4. Пружины 4, гибкий элемент 3 и блок О3 формируют пружинный аккумулятор. Рычаг 1 шарнирно соединен с мотор-колесом 5. Мотор-редуктор с необратимой передачей соединен со звеном 2. и шкив 7, зафиксированный на оси О1, имеют передаточное число 2:1 и с ремнем 8 образуют зубчатую ременную передачу.
При отклонении сиденья (платформы) от заданного положения формируются управляющие сигналы включения мотор-редуктора. Они сообщают вращательное движение звену 2 и, через ременную передачу, звену 1. Таким образом обеспечивается поступательное движение мотор-колеса 5 в вертикальной плоскости. При этом производится уравновешивание полезной нагрузки за счет работы пружин 4 и достигается уменьшение затрат энергии.
При необходимости подъема или опускания рамы на поверхности с сложным или переменным рельефом производится ее перемещение, в том числе для обеспечения ее высоты не менее допустимой.
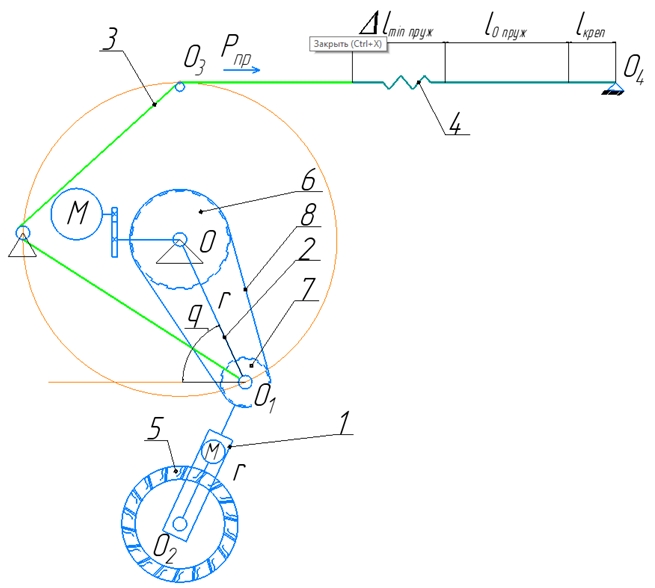
Рис. 1 – Структурная схема модуля с системой уравновешивания:
1, 2 – шарнирно соединенне рычаги; 3 – гибкий элемент; 4 – пружины; 5 – мотор-колесо; 6 – неподвижно закрепленный шкив; 7 – шкив; 8 – ремень
Пружинный аккумулятор можно расположить в произвольном конструктивно выгодном месте. Методика его расчета сводится к определению характеристик основного элемента – пружины (рисунок 2).
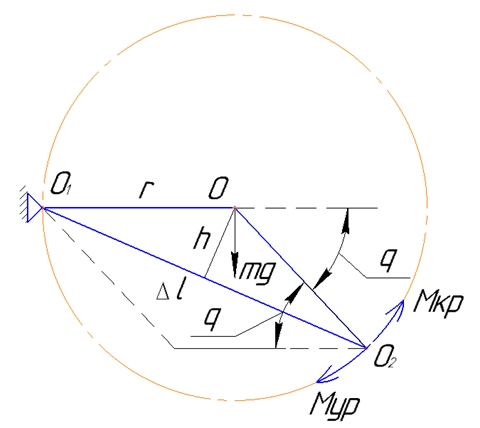
Рис. 2 – Схема модуля стабилизации:
O – ось вращения плеча ОО2; О1 – точка закрепления пружины (гибкого нерастяжимого элемента); О2 – ось вращения шкива 7; r – расстояние ОО1 и ОО2; – удлинение пружины; q – угол отклонения плеча ОО2 от положения устойчивого равновесия пружинного аккумулятора; mg – вес нагрузки; Мур – момент, создаваемый пружиной в точке О2; Мкр – момент, создаваемый нагрузкой в точке О2; h – плечо момента Мкр, создаваемого пружиной
Определим плечо пружины h: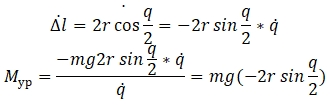 Момент вращения Мкр, обусловленный действием пружины:
Момент вращения Мкр, обусловленный действием пружины:
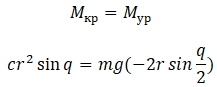 Следовательно, жесткость пружины равна:
Следовательно, жесткость пружины равна:
 где n – количество витков.
где n – количество витков.
Таким образом, на основании характеристик модуля: массы модуля с полезной нагрузкой m, длины звена r, диапазона рабочего угла ![]() возможно подобрать пружину. ГОСТ регламентируют жесткость одного витка пружины, соответственно:
возможно подобрать пружину. ГОСТ регламентируют жесткость одного витка пружины, соответственно:
 где ψ – коэффициент рассеяния;
f – коэффициент трения;
d1 – диаметр осей шарнирных соединений пружины в точках O1 и O2;
d – диаметр оси шарнирного соединения в точке O.
Первая геометрическая передаточная функция кривошипно-кулисного механизма равна:
где ψ – коэффициент рассеяния;
f – коэффициент трения;
d1 – диаметр осей шарнирных соединений пружины в точках O1 и O2;
d – диаметр оси шарнирного соединения в точке O.
Первая геометрическая передаточная функция кривошипно-кулисного механизма равна:
Реализовать пружинный аккумулятор с синусной моментной характеристикой и углом поворота ![]() невозможно, но пружинный аккумулятор с гибким элементом позволяет реализовать моментную характеристику близкую к синусной (конструктивно учитывается радиус блока).
невозможно, но пружинный аккумулятор с гибким элементом позволяет реализовать моментную характеристику близкую к синусной (конструктивно учитывается радиус блока).
Исходя из медико-технических требований знаем минимальную ![]() и максимальную
и максимальную ![]() высоту сиденья ИКК. Соответственно, работа двухзвенника будет совершаться в определенном диапазоне угла сгибания q:
высоту сиденья ИКК. Соответственно, работа двухзвенника будет совершаться в определенном диапазоне угла сгибания q:
Примем, что длины плеч двухзвенника обеспечивают изменение угла q в диапазоне от 120 до 170 градусов. Изменение угла q в рассматриваемом диапазоне можно аппроксимировать как линейную функцию:
![]()
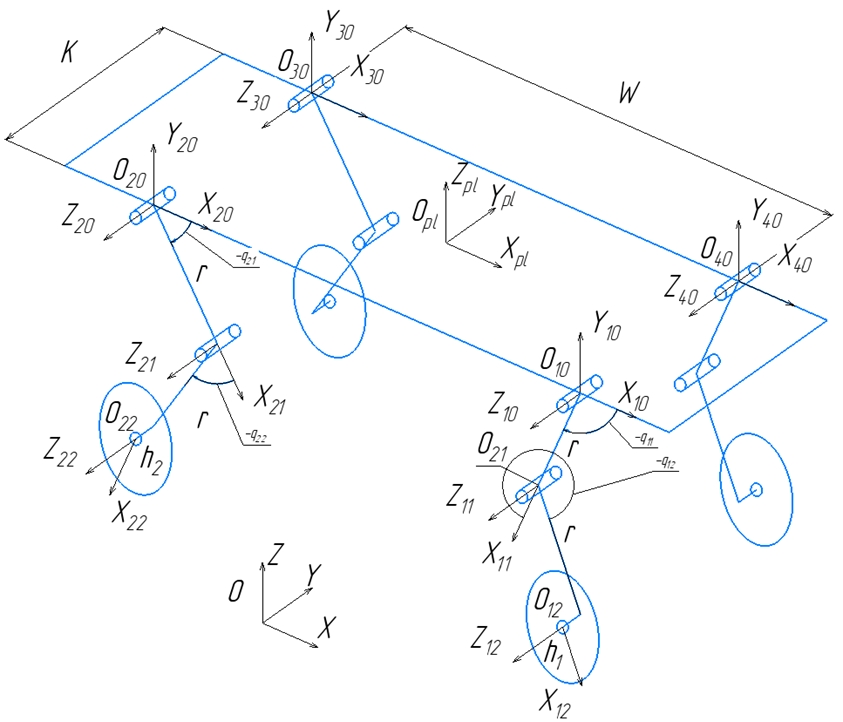
Рис. 3 – Кинематическая схема робота с четырьмя мехатронными модулями стабилизации
Движение в суставах двухзвенников и вращение колес осуществляется параллельно раме. Определим положение рамы относительно глобальной системы координат [9, С.6]: где:
вектор
где:
вектор 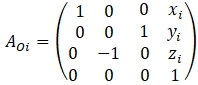 В таблице 1 приведены значения компонент вектора (xi yi zi)T.
В таблице 1 приведены значения компонент вектора (xi yi zi)T.
Таблица 1 – Координаты смещения модулей относительно центра платформы
| Номер ноги | xi | yi | zi |
| 1 | W/2 | -K/2 | 0 |
| 2 | -W/2 | -K/2 | 0 |
| 3 | -W/2 | K/2 | 0 |
| 4 | W/2 | K/2 | 0 |
Введем системы координат, связанные со звеньями модулей, определенные согласно правилам Денавита–Хартенберга. Номера звеньев j отсчитываются от рамы: 1 — верхнее звено, 2 — нижнее звено. Значения параметров приведены в таблицах 2,3.
Таблица 2 – Параметры систем координат первого звена
| Сочленение i | di | ai | qi | |
| 1 | 0 | r | π | 0 |
| 2 | h2 | r | 2π | 0 |
Таблица 3 – Параметры систем координат второго звена
| Сочленение i | di | ai | qi | |
| 1 | 0 | r | 0 | |
| 2 | h2 | r | |
0 |
 Положение конца каждой из ног вычисляется после перемножения соответствующих матриц. Матрица перехода от системы координат конца i-й ноги к глобальной системе координат определяется выражением:
Положение конца каждой из ног вычисляется после перемножения соответствующих матриц. Матрица перехода от системы координат конца i-й ноги к глобальной системе координат определяется выражением:
 Рассмотрим алгоритм работы в одной плоскости.
Рассмотрим алгоритм работы в одной плоскости.
Рис. 4 – Схема модуля подвески инвалидного кресло-коляски на базе двухзвенника
Высота точки крепления ноги:
![]()
Угол поворота звена двухзвенника:
![]()
Установленный в системе датчик высоты работает с частотой 40 Гц, что при скорости линейного движения 1 м/с обеспечивает необходимую скорость обновления информации о наличии препятствий. Наличие пандуса по ходу движения определяется как накопление информации об уменьшении высоты до поверхности, на основании чего высчитывается угол его наклона q1.
Для разработанного модуля построена модель в среде моделирования Simscape Multibody, MATLAB. Макет системы, выполненный на базе контроллера Arduino, представлен на рисунке 5.
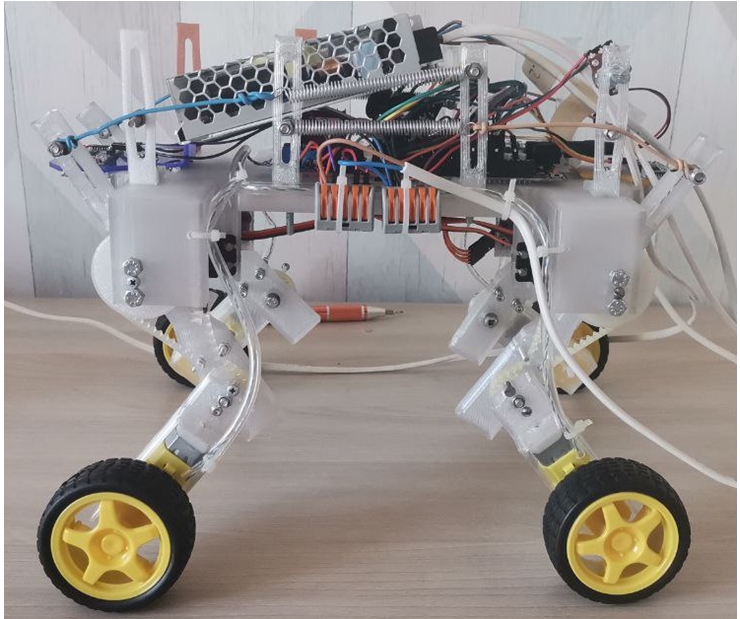
Рис. 5 – Лабораторный макет с мехатронными модулями стабилизации с системой уравновешивания
На графике 6 представлены результаты натурного моделирования изменения высоты макета – задающий сигнал, нагрузочная характеристика и значения с сенсоров.
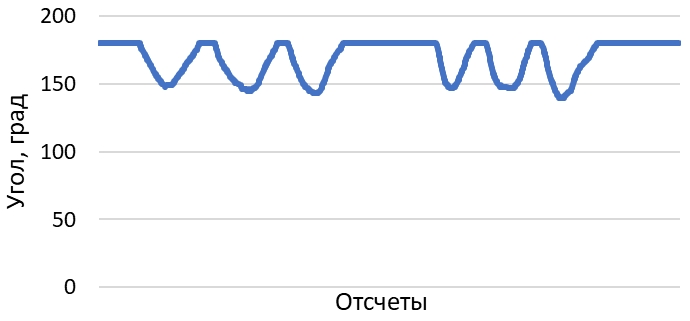 Рис. 6.1 – Результаты исследования изменения высоты рамы:
задающий сигнал сгибания модулей стабилизации высоты
Рис. 6.1 – Результаты исследования изменения высоты рамы:
задающий сигнал сгибания модулей стабилизации высоты
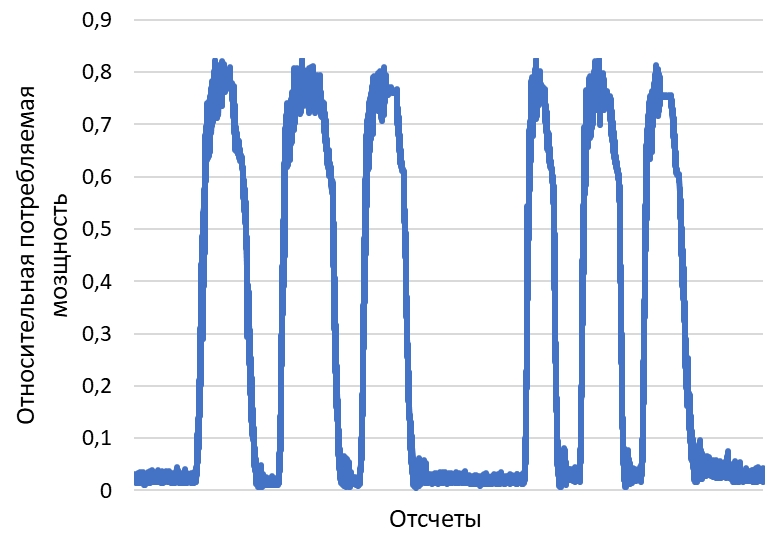 Рис. 6.2 – Результаты исследования изменения высоты рамы: график потребляемой мощности, NI myDAQ
Рис. 6.2 – Результаты исследования изменения высоты рамы: график потребляемой мощности, NI myDAQ
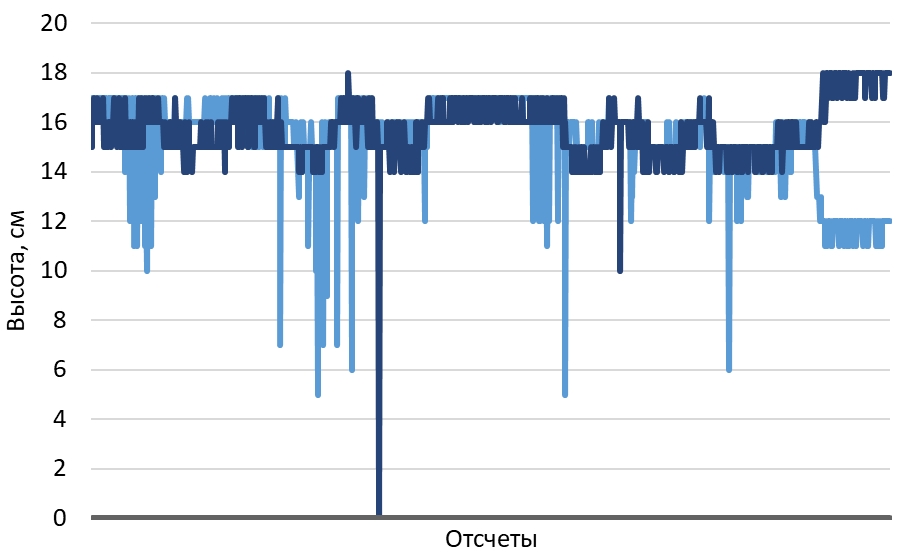
Первые три задающих сигнала отрабатывались с пружинным аккумулятором, но без полезной нагрузки, следующие 3 – с полезной нагрузкой. Анализ рисунка 11 показывает, что, несмотря на ограничения системы измерения, в первом случае (без полезной нагрузки) в процессе опускания приводы модулей стабилизации работали на растяжение пружин и изменение высоты происходило с небольшой задержкой, а при подъеме платформы в исходное положение работа приводов заканчивалась после достижения исходной высоты. С полезной нагрузкой (при уравновешивании крутящего момента пружин) – опускание платформы происходило быстрее, а подъем платформы происходил с минимальными затратами энергии за счет скомпенсированных веса полезной нагрузки и усилия пружин. Установлено, что затраты энергии на работу двигателей модулей стабилизации при работе пружинных аккумуляторов и наличии полезной нагрузки, меньше, чем при отсутствии полезной нагрузки.
Результаты
В результате проведенного исследования разработана математическая модель модуля стабилизации с пружинными аккумуляторами и робота на основе четырех модулей. Разработана методика расчета пружины пружинного аккумулятора. Проведено исследование работы пружинных аккумуляторов на макете робота.
Представленная тема является перспективной для дальнейшего совершенствования системы управления и исследования полноразмерного макета.
| Финансирование Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 19-38-90262. | Funding The reported study was funded by RFBR, project number 19-38-90262. |
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Velho R.. Transport accessibility for wheelchair users: A qualitative analysis of inclusion and health / R. Velho // International Journal of Transportation Science and Technology. – 2019. - Vol. 8 - Is. 2 – P. 103-115.
- Sze N. N. Access to urban transportation system for individuals with disabilities / N. N. Sze, K. M. Christensen // IATSS Research. – 2017. – 41. - P. 66–73.
- Sukerkar K. Smart Wheelchair: A Literature Review / K. Sukerkar, D. Suratwala, A. Saravade et al. // International Journal of Informatics and Communication Technology. 2018. - Vol.7. - No.2. P. 63-66.
- Quaglia G. Design of a self-leveling cam mechanism for a stair climbing wheelchair / G. Quaglia, M. Nisi // Mechanism and Machine Theory. – 2017. – 112. – P. 84–104.
- Candiottia J. Design and evaluation of a seat orientation controller during uneven terrain driving / J. Candiottia, H. Wanga, C.-S. Chunga et al. // Medical Engineering and Physics. – 2016. – 38. – P. 241–247.
- Jamin N. F. Two-Wheeled Wheelchair Stabilization Control Using Fuzzy Logic Controller Based Particle Swarm Optimization / N. F. Jamin, N. A. Ghani // 2016 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS). – 2016. – P. 78-83.
- Xu W. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system / W. Xu, H. Chen, H. Zhao et al. // Mechatronics. – 2019. - Vol. 57. P. 95-108.
- Andreev V. The Principle of Full Functionality – the Basis for Rapid Reconfiguration in Heterogeneous Modular Mobile Robots / V. Andreev, V. Kim, P. Pletenev // Proceedings of the 28th DAAAM International Symposium. - 2017. - P. 23-28.
- Антонов А.В. Решение задач кинематики и динамики для трехопорного колесно-шагающего робота / А.В. Антонов, С.А. Воротников // Известия высших учебных заведений. Машиностроение. №3(684). 2017. С. 4-11.
- Зенкевич С.Л. Основы управления манипуляционными роботами / С.Л. Зенкевич, А.С. Ющенко // Изд-во МГТУ им. Н.Э. Баумана. - 2004. - 480 с.
Список литературы на английском языке / References in English*
- Velho R. Transport accessibility for wheelchair users: A qualitative analysis of inclusion and health / R. Velho // International Journal of Transportation Science and Technology. – 2019. - Vol. 8 - Is. 2 – P. 103-115.
- Sze N. N. Access to urban transportation system for individuals with disabilities / N. N. Sze, K. M. Christensen // IATSS Research. – 2017. – 41. - P. 66–73.
- Sukerkar K. Smart Wheelchair: A Literature Review / K. Sukerkar, D. Suratwala, A. Saravade et al. // International Journal of Informatics and Communication Technology. 2018. - Vol.7. - No.2. P. 63-66.
- Quaglia G. Design of a self-leveling cam mechanism for a stair climbing wheelchair / G. Quaglia, M. Nisi // Mechanism and Machine Theory. – 2017. – 112. – P. 84–104.
- Candiottia J. Design and evaluation of a seat orientation controller during uneven terrain driving / J. Candiottia, H. Wanga, C.-S. Chunga et al. // Medical Engineering and Physics. – 2016. – 38. – P. 241–247.
- Jamin N. F. Two-Wheeled Wheelchair Stabilization Control Using Fuzzy Logic Controller Based Particle Swarm Optimization / N. F. Jamin, N. A. Ghani // 2016 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS). – 2016. – P. 78-83.
- Xu W. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system / W. Xu, H. Chen, H. Zhao et al. // Mechatronics. – 2019. - Vol. 57. P. 95-108.
- Andreev V. The Principle of Full Functionality – the Basis for Rapid Reconfiguration in Heterogeneous Modular Mobile Robots / V. Andreev, V. Kim, P. Pletenev // Proceedings of the 28th DAAAM International Symposium. - 2017. - P. 23-28.
- Antonov A.V. Reshenie zadach kinematiki i dinamiki dlja trehopornogo kolesno-shagajushhego robota [The solution of kinematics and dynamics problems for a tricycle wheel-walking robot] / A.V. Antonov, S. A. Vorotnikov // Izvestija vysshih uchebnyh zavedenij. Mashinostroenie [Izvestia of higher educational institutions. Mechanical engineering]. No. 3(684). 2017. pp. 4-11. [in Russian]
- Zenkevich S. L. Osnovy upravlenija manipuljacionnymi robotami [Fundamentals of manipulative robot control] / S. L. Zenkevich, A. S. Yushchenko // Publishing House of Bauman Moscow State Technical University. - 2004. - 480 p. [in Russian]