DESIGNING OF ULTRASONIC DISTANCE METER BASED ON MICROCONTROLLER

Чуфырев А.Е.1, Устюгов В.А.2
1Cтудент направления «Радиофизика», 2Кандидат физико-математических наук, старший преподаватель, ФГБОУ ВО «Сыктывкарский государственный университет им. Питирима Сорокина»
РАЗРАБОТКА УЛЬТРАЗВУКОВОГО ДАЛЬНОМЕРА НА МИКРОКОНТРОЛЛЕРЕ
Аннотация
В статье описывается разработка автономного дальномера ультразвукового типа на микроконтроллере Texas Instruments LM4F120H5QR (архитектура ARM Cortex-M4F) с индикацией измеренного значения на дисплее и передачей его на компьютер.
Ключевые слова: дальномер, ультразвук, микроконтроллер, ARM.
Chufyrev A.E.1, Ustyugov V.A.2
1Student, 2PhD in Physics and mathematics, Syktyvkar State University
DESIGNING OF ULTRASONIC DISTANCE METER BASED ON MICROCONTROLLER
Abstract
This paper describes development of autonomous ultrasonic distance meter based on Texas Instruments microcontroller LM4F120H5QR (ARM Cortex-M4F architecture) with indexing of measured value onto display and transferring to the computer.
Keywords: distance meter, ultrasound, ARM microcontrollers.
Введение
В настоящее время широко распространены портативные радиолюбительские устройства на микроконтроллерах. Наиболее популярными до недавнего времени были архитектуры фирм ST Electronics (STM8), Atmel (AVR8) и Microchip (PIC). Однако в последние годы набирают популярность микроконтроллеры с ядрами класса ARM Cortex [1] Кроме того, отдельные производители выпускают указанные микросхемы в корпусах DIP, что делает их пригодными для использования в домашнем радиотехническом творчестве.
В настоящей статье рассказано о применении микроконтроллера LM4F120H5QR для построения ультразвукового дальномера.
Описание устройства
Дальномер состоит из следующих блоков:
- Процессорный модуль (микроконтроллер несъемным образом расположен на отладочной плате Texas Instruments Stellaris LaunchPad EK-LM4F120XL);
- Ультразвуковой цифровой приемо-передатчик US-020;
- Дисплей из светодиодных индикаторов.
Все блоки смонтированы в пластмассовом корпусе, в котором также располагаются элементы питания. На задней стенке размещены выключатель, кнопка перезапуска контроллера и разъем подзарядки. Ультразвуковой приемо-передатчик съемный. Во время работы он выступает из корпуса для исключения нежелательных переотражений ультразвуковых импульсов. На лицевой панели выведены светодиодные индикаторы, на которых отображается текущее расстояние. Таким образом, прибор полностью автономен и не требует дополнительных компонентов для работы.
После включения и вывода в рабочий режим прибор автоматически начинает измерения дальности каждые 0,5 секунды. После каждого измерения на светодиодное табло выводится текущая измеренная дистанция в сантиметрах. Если расстояние превышает 9,99 м, табло ничего не показывает.
Для измерения расстояния до объекта необходимо так расположить устройство в пространстве, чтобы ультразвуковой приемо-передатчик был точно направлен лицевой стороной на данный объект. В силу особенностей ультразвукового способа измерения дальности и конструкции УЗ-датчика на точность измерений сильно влияют посторонние объекты, находящиеся вблизи прямой, соединяющей сенсор с предметом измерений.
Модуль управления устройства
В роли главного управляющего устройства применен 32-битный микропроцессор компании Texas Instruments LM4F120H5QR архитектуры ARM Cortex-M4F. Семейство архитектур Cortex-M («M» – microcontroller) используется для микроконтроллеров и недорогих встраиваемых устройств, где не требуются высокие вычислительные мощности, но выдвигаются серьезные требования к энергопотреблению, времени реакции на прерывания и простоте использования. Данный процессор компания позиционирует как недорогое решение, подходящее, как любителям, так и профессионалам. Среди целей его создания была поставлена задача иметь собственный микроконтроллер и экосистему, способную конкурировать с популярным Arduino. Из особенностей микропроцессора стоит выделить:
- Тактовая частота: 80 МГц;
- 6×8 пользовательских I/O (GPIO);
- Аппаратный модуль UART;
- Шесть 16/32-битных и шесть 32/64-битных таймеров;
- Модуль для работы с числами с плавающей запятой;
УЗ датчик US-020 является популярным и очень недорогим решением OEM-производства. Несмотря на отсутствие фирменной упаковки, прямых контактов с производителем, официальной документации и инструкции, он обеспечивает приемлемое выполнение поставленных задач.
Датчик представляет собой небольшую плату, на которой размещены все компоненты. На передней стороне расположены только излучатель (T) и приемник (R). Их внешний вид абсолютно идентичен, на каждом установлен рупорный кожух и защитная сетка.
Работа устройство происходит следующим образом (Рис.1). После подачи на контакт Trig высокого уровня в течение не менее 10 мкс передатчик-излучатель посылает 8 УЗ импульсов. Когда приемник принял отраженный сигнал, на вывод Echo подается высокий уровень длительностью, пропорциональной расстоянию до объекта. Следующее измерение рекомендуется выполнять не ранее, чем через 50 мс.
Определим, как именно должно работать устройство: после включения прибор каждые полсекунды производит автоматические измерения дальности и выводит показания на дисплей (и по интерфейсу UART).
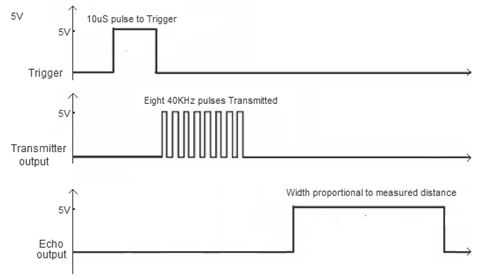
Рис. 1 – Временная диаграмма работы ультразвукового датчика
Таким образом, алгоритм программы следующий:
- Таймер-1 отмеряет 0,5 секунд и генерирует Прерывание-1;
- В ходе Прерывания-1 посылается импульс на УЗ сенсор (вывод Trig);
- При обнаружении высокого уровня на входе (вывод Echo) запускается Таймер-2;
- Как только высокий уровень обрывается, порт Echo генерирует Прерывание-2;
- Прерывание-2 по значению счетного регистра Таймера-2 вычисляет дистанцию и выводит на дисплей и последовательный порт значение расстояния.
Создание и отладка прошивки велись в фирменной интегрированной среде разработки Code Composer Studio (CCS) 6.0, работающей под операционной системой Windows 8.1 на языке Си. Данная IDE - собственная разработка Texas Instruments, основанная на Eclipse IDE. Среда свободно распространяется после регистрации на официальном сайте ti.com.
В результате проделанной работы удалось выполнить поставленную задачу и сконструировать автономный ультразвуковой дальномер. Путем сравнения показаний с эталонным лазерным дальномером Leica была определена погрешность прибора – 1% от получаемого значения.
Литература
- Yiu Joseph The Definitive Guide to ARM® Cortex®-M3 and Cortex-M4 Processors [Book]. - The Boulevard, Langford Lane, Kidlington, Oxford OX5 1GB, UK; 225 Wyman Street, Waltham, MA 02451, USA : Elsevier Inc., 2014. - Third Edition.