Rus
Eng
Journals
Submit manuscript
Sign in / Sign up
About journal
Archive
Contacts
Advanced search
Return to article
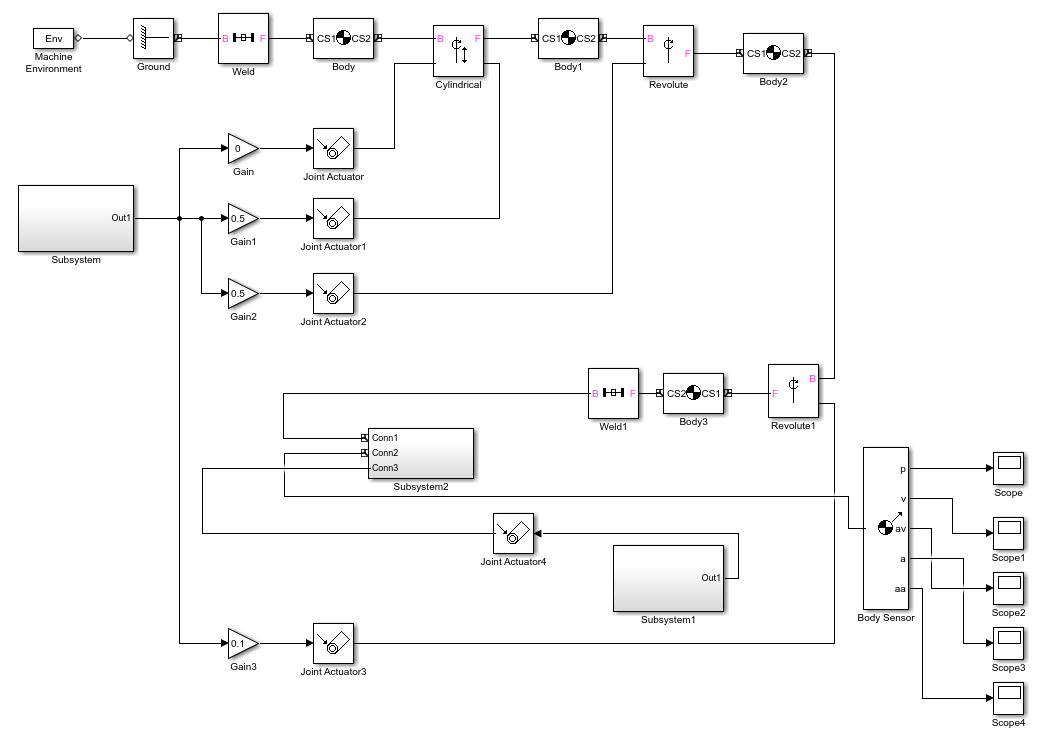
Создание универсальной модели В ПРОГРАММНОМ ПАКЕТЕ SIMULINK для АНАЛИЗа ПАРАМЕТРОВ типовых роботов-манипуляторов
Блок-схема модели робота-манипулятора с захватом
DOI:
10.23670/IRJ.2023.133.86.2
Display full size
Download image