MODULE OF THE TECHNICAL VISION WITH A SPHERICAL INDUCTION MOTOR

Уразбахтин Р.Р.1, Вавилов В.Е.2
1Студент, 2cтарший преподаватель кафедры электромеханики,
Уфимский государственный авиационный технический университет
МОДУЛЬ ТЕХНИЧЕСКОГО ЗРЕНИЯ СО СФЕРИЧЕСКИМ ИНДУКЦИОННЫМ ДВИГАТЕЛЕМ
Аннотация
В статье рассмотрены существующие варианты реализации технического зрения, применяющиеся для сложных медицинских операций с использованием эндоскопического оборудования, для управления производственными станками, машинами и летательными аппаратами. Выявлены недостатки существующих систем технического зрения. Далее в статье авторами предлагается новый вариант реализации технического зрения – модуль технического зрения со сферическим индукционным двигателем, в котором отсутствуют выявленные у существующих систем технического зрения недостатки. Описаны устройство модуля технического зрения со сферическим индукционным двигателем и принцип работы модуля технического зрения со сферическим индукционным двигателем.
Ключевые слова: техническое зрение, недостатки существующих систем технического зрения, сферический индукционный двигатель, модуль технического зрения со сферическим индукционным двигателем, применение модуля технического зрения со сферическим индукционным двигателем.
Urazbakhtin R.R.1, Vavilov V.E.2
1Student, 2Senior lecturer of the department of electromechanics,
Ufa State Aviation Technical University
MODULE OF THE TECHNICAL VISION WITH A SPHERICAL INDUCTION MOTOR
Abstract
The article deals with the existing implementations of technical vision, which are used for the medical operations with usage of endoscopic equipment, control industrial machines, cars and flying vehicles. The shortcomings of the existing systems of technical vision are revealed. In the article authors propose a new realization of the technical vision - module of the technical vision with a spherical induction motor in which there is no identified from existing technical vision systems deficiencies. The module of the technical vision with a spherical induction motor and the operating principle of module of the technical vision with a spherical induction motor are described.
Keywords: technical vision, shortcomings of existing systems of the technical vision, spherical induction motor, module of the technical vision with a spherical induction motor, usage of a module of the technical vision with a spherical induction motor.
На сегодняшний день актуальна проблема создания устройства для восприятия визуальной информации об окружающей среде, обработки и анализа изображений рабочих сцен с целью решения задачи распознавания образов. Обработка визуальной информации, как в живых, так и в технических системах заключается в получении некоторого представления сцены – ее изображения и формирования последующего описания. Существенной особенностью систем данного типа является необходимость формирования объемного изображения объекта. Вообще говоря, поверхность любого реального объекта является сложной и содержит как выпуклые, так и вогнутые участки. При анализе таких объектов необходимо бесконечное множество направлений съемки. Это возможно реализовать, если систему технического зрения оснастить сферическим индукционным двигателем, который будет перемещать видеокамеру или приемник излучения системы технического зрения под необходимыми углами. Такие устройства позволят, например, роботам, машинам и летательным аппаратам выполнять определенные действия и задачи без вмешательства человека. Система технического зрения может применяться на производстве (для управления станком или для контроля качества продукции) и в области медицины (для проведения сложных операций с применением эндоскопического оборудования). К сожалению, известные в настоящее время системы технического зрения обладают весомыми недостатками. Рассмотрим систему, которая применяется в медицине при проведении операций.
Эндоскопическое устройство для наблюдения полостей глубоких ран с помощью видеосистемы при проведении операций имеет жесткий корпус. Внутри корпуса размещен информационный канал, имеющий систему линз, окуляр и объектив. Перед объективом установлена поворотная призма, соединенная с механизмом изменения положения призмы. Устройство имеет также систему изменения масштаба изображения, соединенную с окуляром. Через наглазник устройство подсоединяется к видеосистеме [1].
Очевидно, что недостатками эндоскопического устройства для наблюдения полостей глубоких ран являются невысокая скорость выполнения заданных команд в связи с наличием сложной системы линз и сложным путем передачи информации до системы обработки этой информации, низкая надежность системы в связи с хрупкостью сложной оптической системы линз.
Известно, что для управления движением роботов применяется устройство для управления движением мобильных технологических машин и роботов.
Устройство для управления движением мобильных технологических машин и роботов содержит фотоэлектронный блок определения координат положения мобильной технологической машины или робота относительно заданного положения. Также устройство содержит блок управления исполнительными механизмами и лазерный передатчик. Устройство дополнительно снабжено нейросетевым блоком обработки информации, процессором обработки изображения и поворотным блоком. На поворотном блоке в свою очередь установлены видеокамера, осветитель и лазерный дальномер [2].
Недостатками устройства для управления движением мобильных технологических машин и роботов являются большой вес системы в целом в связи использованием поворотного блока для установки видеокамеры, а также небольшая скорость выполнения заданных команд в связи с тем, что поворотный блок видеокамеры выполняет движения по прямолинейной траектории в горизонтальном или вертикальном направлении.
Также стоит отметить устройство, которое может применяться в системах наведения.
Оптико-электронная система зенитного ракетного комплекса содержит оптический пост. Оптический пост состоит из: несущей стойки, основания с поддоном, приводов с исполнительными механизмами наведения по вертикали и горизонтали и блоком управления. Блок управления содержит тепловизионный прибор с телеавтоматом и инфракрасный пеленгатор, состоящий из оптико-электронного датчика и блока выделения координат. Устройство также содержит: передатчик команд с антенной, подвижную и неподвижную ветви волноводной системы, гироскопический датчик углов и кабельные сборки с герметичными выходами к разъемам. Причем исполнительные механизмы приводов наведения оптического поста выполнены на бесконтактных моментных двигателях [3].
Очевидно, что основным недостатком описанной системы является низкая скорость выполнения заданных команд. Это обусловлено тем, что движения считывающего информацию устройства совершаются по горизонтали и вертикали по отдельности за счет двух различных приводов. По этой же причине у описанной системы большая масса.
Обобщая выше изложенное, следует отметить, что основными недостатками существующих устройств являются большая масса, низкая надежность и невысокая скорость выполнения команд. Поэтому актуально создание системы, не обладающей перечисленными недостатками.
Остановимся также на том, что для предлагаемого модуля технического зрения со сферическим индукционным двигателем наиболее подходящим устройством для получения информации является видеокамера. Видеокамера в настоящее время обладает невысокой стоимостью по сравнению, например, с лидарами (лидары также могут применяться в системах технического зрения). Преимуществом лидара является то, что можно получить информацию о местности в большом радиусе от самого лидара. С помощью лидара можно получить информацию о расстоянии до объекта, а также форме, размерах и расположении объекта в пространстве. Стоит отметить, что информация, получаемая с лидара, записывается в массив, элементы которого представляют собой координаты каждой точки анализируемого пространства. Этот факт осложняет дальнейшую обработку полученной информации. Более того, современные лидары довольно хрупкие и ненадежные. Преимуществами видеокамеры перед лидаром является то, что с ее помощью, во-первых, можно более точно и быстро отслеживать движущиеся объекты, а во-вторых, с помощью видеокамеры можно получить информацию о цвете объекта. Недостатком видеокамеры является то, что при использовании одной видеокамеры возникает погрешность при определении расстояния от видеокамеры до объекта. Также возможны ситуации, когда при использовании модуля технического зрения, например, на производстве оператору понадобится получить изображение происходящего процесса. С помощью лидара достичь этого не возможно.
Увеличение быстродействия системы, повышение ее надежности и снижение массы может достигаться за счет применения вместо приводов, выполняющих движения по горизонтали и вертикали сферического индукционного двигателя.
Преимущество применения сферического индукционного двигателя заключается в том, что его движения не ограничены только перемещениями по горизонтали и вертикали. Это позволит увеличить размеры пространства, которое может наблюдаться за счет системы технического зрения с применением такого двигателя. Двигатель, применение которого возможно, в том числе, в системах технического зрения, подробно описан в статье [4].
Авторами предлагается модуль технического зрения со сферическим индукционным двигателем. На рис. 1 представлен модуль технического зрения со сферическим индукционным двигателем.
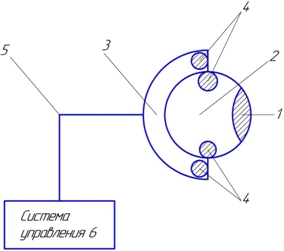
Рис. 1 – модуль технического зрения со сферическим индукционным двигателем: 1 – видеокамера, 2 – ротор, 3 – статор, 4 – пары датчиков положения ротора, 5 – соединительный провод, 6 – система управления
Модуль технического зрения со сферическим индукционным двигателем обладает повышенными надежностью и быстродействием, меньшей массой, возможностью осуществления поворота видеокамеры на необходимый угол. Каждое из преимуществ предлагаемого устройства объясняется следующим. Повышенная надежность связана с применением одного сферического индукционного двигателя вместо двух приводов, в системах, описанных в работах [2] и [3]. По той же причине масса модуля технического зрения меньше, чем у систем, описанных в работах [2] и [3].
Характеристики предлагаемого модуля технического зрения сравним с популярной системой технического зрения Omron Xpectia FH. Начальная комплектация системы Omron Xpectia FH не подразумевает привода для видеокамеры. Поэтому примем массу привода для видеокамеры равной 600 грамм. Соответственно масса двух приводов составит около 1,2 кг. При оценке общей массы системы вес монитора не учитывается. Для системы технического зрения Omron Xpectia FH при сравнении с предлагаемым авторами устройством выберем минимально возможную массу. Минимально возможная масса системы технического зрения Omron Xpectia FH без монитора и без приводов составит 2,4 кг. Соответственно с приводами эта масса составит 3,6 кг. Расчётная масса модуля технического зрения с аналогичной комплектацией составляет 2,5 кг. При этом на данный момент вес сферического индукционного двигателя составляет приблизительно 700 грамм. Но возможно дальнейшее снижение его массы за счет использования в отдельных частях сферического индукционного двигателя современных композитных материалов. Получение изображения с видеокамеры и его анализ для модуля технического зрения со сферическим индукционным двигателем составляет 10-20 миллисекунд для одного кадра. Увеличение быстродействия составит порядка 25% по сравнению с устройствами, выполненными с двумя приводами, выполняющими движения по вертикали и горизонтали.
Предлагаемый модуль технического зрения со сферическим индукционным двигателем имеет следующее техническое устройство.
Видеокамера механически соединена с ротором, то есть, вмонтирована в него так, как показано на чертеже. При этом ротор имеет сферическую форму. Вмонтированная в ротор видеокамера не нарушает сферическую форму ротора, так как внешняя поверхность видеокамеры выполнена как продолжение поверхности сферы, образованной ротором. Ротор находится в статоре. Статор имеет полусферическую форму, повторяющую форму ротора. Ротор выполняет движения по внутренней полусфере статора, при этом видеокамера движется по полусфере, которая не пересекается с внутренней полусферой статора. Таким образом, в изображение видеокамеры не попадает изображение внутренних частей статора. Видеокамера обеспечивает углы обзора по горизонтали и вертикали сопоставимые с теми углами, на которые может смещаться человеческий глаз по горизонтали и вертикали соответственно. Возможность такого движения ротора обеспечивается получением и обработкой данных с пар датчиков положения ротора и соответствующими сигналами от системы управления. Пары датчиков положения ротора установлены на роторе и статоре и предотвращают направление видеокамеры во внутреннюю часть статора. Количество пар датчиков положения ротора может изменяться в зависимости от необходимой точности управления модулем технического зрения со сферическим индукционным двигателем и в зависимости от сферы применения заявляемого модуля. Данные, считываемые с пар датчиков положения ротора, обрабатываются системой управления. Соединительный провод выполнен с возможностью передачи данных от системы управления к парам датчиков положения ротора и передачи данных от пар датчиков положения ротора в систему управления. Статор находится в корпусе. Корпус статора может выполняться различным образом в зависимости от того, куда будет устанавливаться модуль технического зрения со сферическим индукционным двигателем. На корпусе статора могут быть выполнены необходимые крепежные элементы в зависимости от того, куда будет устанавливаться модуль технического зрения со сферическим индукционным двигателем. Статор посредством соединительного провода подключен к системе управления. По соединительному проводу от системы управления к статору и видеокамере подаются сигналы управления. Соединительный провод выполнен с возможностью передачи от видеокамеры информации в систему управления. Длина соединительного провода может варьироваться в зависимости от условий, в которых применяется модуль технического зрения со сферическим индукционным двигателем. Система управления выполнена с возможностью генерации необходимых для корректного управления сферическим индукционным двигателем сигналов. Система управления включает в себя систему обработки информации, получаемой с видеокамеры.
Принцип работы предлагаемого модуля технического зрения заключается в следующем.
С системы управления подается сигнал управления на статор и видеокамеру посредством соединительного провода. На статор и видеокамеру поступают различные сигналы управления. При этом видеокамера включается и начинает передавать получаемую информацию в систему управления посредством соединительного провода, ротор отклоняется к изначально заданному положению. При изменении сигнала от системы управления, подаваемого на статор, изменяется положение ротора в той области, в которой возможно движение ротора. Система управления при этом считывает и обрабатывает данные с пар датчиков положения ротора, что позволяет постоянно определять положение ротора и корректировать или изменять положение ротора и, соответственно, направление видеокамеры.
Предлагаемый авторами модуль технического зрения может применяться в качестве модуля технического зрения для беспилотных роботов, автомобилей или летательных аппаратов. Также устройство может применяться для контроля качества изделий на производстве, управления станками. Если модуль технического зрения со сферическим индукционным двигателем будет выполнен небольшого размера, то он может применяться в медицине для проведения сложных операций, требующих введения в организм видеокамеры в связи с невозможностью оперирующим врачом видеть оперируемую область.
Стоит отдельно остановиться на сферическом индукционном двигателе. За прототип взят сферический индукционный двигатель, разработанный американскими учеными (рис. 2) [4]. Описание и расчеты сферического индукционного двигателя для определенных параметров приведены в статье [4].
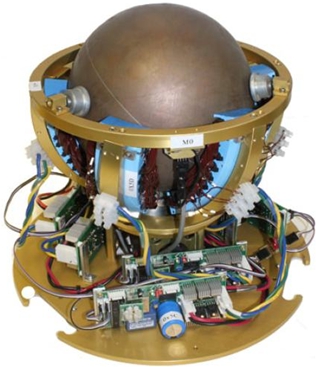
Рис. 2 – прототип сферического индукционного двигателя, предлагаемого к применению в модуле технического зрения со сферическим индукционным двигателем
Основным отличием предлагаемого авторами сферического индукционного двигателя является новое конструктивное исполнение ротора, в котором находится видеокамера. Менее значительным отличием является измененная система управления сферическим индукционным двигателем. Стоит отметить, что в предлагаемом модуле технического зрения видеокамера не должна направляться во внутреннюю область статора сферического индукционного двигателя, поэтому сферический индукционный двигатель для модуля технического зрения следует изготовить таким образом, чтобы этим двигателем обеспечивалась возможность перемещения видеокамеры только по полусфере, не пересекающейся с внутренней областью статора. То есть перемещение видеокамеры в необходимой области будет обуславливаться техническими особенностями сферического индукционного двигателя. Основное отличие системы управления обуславливается тем, что видеокамера не должна направляться во внутреннюю область статора сферического индукционного двигателя. То есть система управления должна быть построена таким образом, чтобы предотвратить направление видеокамеры во внутреннюю область статора, основываясь на данных, получаемых с пар датчиков положения ротора (при условии, что направление видеокамеры во внутреннюю область статора не ограничено техническими особенностями сферического индукционного двигателя).
Авторами разработана конструкция сферического индукционного двигателя. На жестком недеформируемом каркасе размещаются 6 статоров, как показано на рис. 2. Такая компоновка статоров позволит добиться необходимого перемещения видеокамеры в описанной области и беспрепятственно провести провод от системы управления к видеокамере, вмонтированной в ротор. Рамка для установки шести статоров выполняется из композитного материала для облегчения веса конструкции предлагаемого модуля технического зрения со сферическим индукционным двигателем и для исключения магнитного взаимодействия между рамкой и статорами. Углы между центрами роторов одинаковы и составляют 60 градусов. Также на рамке предусматривается крепление для установки системы управления. Ротор сферического индукционного двигателя выполняется полым, так как внутри его устанавливается видеокамера. Ротор состоит из двух отдельных стальных полусфер, покрытых медью. В одной полусфере во внутренней части предусматривается крепление для видеокамеры. Во второй полусфере предусматривается отверстие для провода, соединяющего систему управления с видеокамерой. После установки в полусферах видеокамеры и прокладки провода, они соединяются между собой путем сварки. Получившийся при этом шов шлифуется и покрывается медным слоем. На поверхности ротора крепятся датчики положения ротора.
В системе управления сферического индукционного двигателя реализуется векторный алгоритм управления, в связи с тем что при использовании дискретного алгоритма не достигается плавного перемещения видеокамеры (перемещение видеокамеры производится на некоторые элементарные участки). В предлагаемом варианте реализации сферического индукционного двигателя при реализации дискретного алгоритма управления такие элементарные участки будут большими, так как его конструкция подразумевает 6 статоров. Датчики положения ротора находятся и на роторе, и на рамке статора, так как ротор представляет собой цельный стальной шар с медным покрытием. Положение ротора отслеживается путем определения положения парных датчиков друг относительно друга. Ротор принимает начальное положение, когда парные датчики располагаются друг напротив друга, при этом расстояние между ними наименьшее.
Итак, основными недостатками существующих систем технического зрения являются низкое быстродействие, значительная масса и невысокая надежность. В некоторых системах медицинского назначения недостаточная обзорность и невысокая надежность. Избежать этих недостатков можно, если в подобных системах использовать сферический индукционный двигатель. Авторами предлагается новый способ реализации системы технического зрения – модуль технического зрения со сферическим индукционным двигателем. Предлагаемый модуль технического зрения имеет широкую область применения, высокую универсальность. Основными преимуществами модуля технического зрения со сферическим индукционным двигателем являются большой угол обзора, повышенное быстродействие, в связи с тем, что с помощью сферического индукционного двигателя можно направить видеокамеру в необходимую точку, совершив при этом одно перемещение. Преимуществами являются повышенная надежность, обусловленная надежностью сферического индукционного двигателя, и меньшая в сравнении с аналогичными системами масса, достигаемая за счет применения одного сферического индукционного двигателя вместо двух приводов, выполняющих движения по вертикали и горизонтали, и за счет применения композитных материалов при изготовлении рамки для шести статоров. Использование видеокамеры в предлагаемом модуле технического зрения со сферическим индукционным двигателем объясняется ее большей универсальностью и менее высокой стоимостью, чем у других устройств для обработки визуальной информации. Применение видеокамеры позволяет снизить стоимость предлагаемой системы и повысить ее надежность.
Список литературы / References
- Заявка на пат. 94033495 Российская федерация, A61B1/06. Эндоскопическое устройство для наблюдения полостей глубоких ран с помощь видиосистемы при проведении операций / Прудков М.И., Зайков С.А., Шелепов Л.Е., Максимов Г.Н., Клепалов В.И., Савин Н.С.; заявитель Медицинская компания «САН»; заявл. 13.09.1994; опубл. 10.08.1996
- Пат. 154324 Российская федерация, B25J9/00. Устройство для управления движением мобильных технологических машин и роботов / Глебов Николай Алексеевич, Амин Нихад Мохаммед Амин; заявитель и патентообладатель ФГБОУ ВПО "Южно-Российский государственный политехнический университет имени М.И. Платова"; заявл. 02.04.2015; опубл. 20.08.2015, Бюл. №23
- Пат. 2165582 Российская федерация, F41G7/30.Оптико-электронная система зенитно-ракетного комплекса / Образумов В.И., Слугин В.Г., Кисляк В.А., Белянский Е.В., Кузьмич Я.Л.; заявитель и патентообладатель Государственное унитарное предприятие Конструкторское бюро приборостроения; заявл. 08.06.1999; опубл. 20.04.2011 Бюл. №11
- Система технического зрения Xpectia FH [Электронный ресурс] // URL: http://www.baltacom.com/sites/default/files/catalogue/pdfs/xpectia_selectrion_rus.pdf (дата обращения: 08.11.2017)
- Bhatia, Ankit “Six-Stator Spherical Induction Motor for Balancing Mobile Robots” / Ankit Bhatia, Masaaki Kumagai, Ralph Hollis // proceedings of the International Conference on Robotics and Automation, 26-30 May 2015, Seattle, WA USA
- Хорн Б.К.П. Зрение роботов: Пер. с англ. / Б.К.П. Хорн – М.: Мир, 1989. – 487 с.
- Мошкин В.И. Техническое зрение роботов/ В. И. Мошкин, А. А. Петров, В. С. Титов и др. – М.: Машиностроение, 1990. – 272 с.
- Липин А.В. Автореферат диссертации на соискание ученой степени кандидата технических наук Разработка и исследование трехкоординатного электропривода для манипуляторов [Электронный ресурс] / А.В. Липин // URL: http://science.kuzstu.ru/wp-content/docs/OAD/Autoreferats/LipinAV.pdf (дата обращения: 10.10.2017)
- Гридин В.Н. Адаптивные системы технического зрения / В.Н. Гридин, В.С. Титов, М.И. Труфанов – М.: Наука, 2009. – 442 с.
- Ошлаков, В.Г. Оптическая инструментальная система ориентирования в условиях недостаточной видимости / Ошлаков В.Г., Цвык Р.Ш., Илюшин Я.А. // Техническое зрение в системах управления 2012: сборник трудов науч.-техн. конф. 14 -16 марта 2012 г., Москва / Учреждение Российской академии наук Институт космических исследований РАН, ФГУП "Государственный научно-исследовательский институт авиационных систем", Учреждение Российской академии наук Институт прикладной математики им. М.В.Келдыша РАН. – Москва, 2011. – с.16 - 26
- Кузьмин, С.А. Способы повышения точности выделения объектов в видеопоследовательностях / Кузьмин С.А. // Техническое зрение в системах управления 2012: сборник трудов науч.-техн. конф. 14 -16 марта 2012 г., Москва / Учреждение Российской академии наук Институт космических исследований РАН, ФГУП "Государственный научно-исследовательский институт авиационных систем", Учреждение Российской академии наук Институт прикладной математики им. М.В.Келдыша РАН. – Москва, 2011. – с.124 - 132
- Зейналов, Р.Ш. Система бесконтактных измерений параметров высокоскоростных объектов / Зейналов Р.Ш., Конушин А.С. // Техническое зрение в системах управления 2012: сборник трудов науч.-техн. конф. 14 -16 марта 2012 г., Москва / Учреждение Российской академии наук Институт космических исследований РАН, ФГУП "Государственный научно-исследовательский институт авиационных систем", Учреждение Российской академии наук Институт прикладной математики им. М.В.Келдыша РАН. – Москва, 2011. – с.193 - 199
- Сканирующие лазерные дальномеры (LIDAR) [Электронный ресурс] / А. Антонов // URL: https://www.soel.ru/upload/iblock/792/20160110.pdf (дата обращения: 10.11.2017)
Список литературы на английском языке / References in English
- Pat. Appl. 94033495 Russian Federation, A61B1/06. Jendoskopicheskoe ustrojstvo dlja nabljudenija polostej glubokih ran s pomoshh' vidiosistemy pri provedenii operacij [Endoscopic device for the observation of cavities of deep wounds with the help of a video system during operations] / Prudkov M.I., Zajkov S.A., Shelepov L.E., Maksimov G.N., Klepalov V.I., Savin N.S.; the applicant Medicine company «SAN»; appl. 13.09.1994; publ. 10.08.1996
- Pat. 154324 Russian Federation, B25J9/00. Ustrojstvo dlja upravlenija dvizheniem mobil'nyh tehnologicheskih mashin i robotov [Device for controlling the movement of mobile technological machines and robots] / Glebov Nikolaj Alekseevich, Amin Nihad Mohammed Amin; The applicant and the patentee Platov South-Russian State Polytechnic University; appl. 02.04.2015; publ. 20.08.2015, Bul. Number 23.
- Pat. 2165582 Russian Federation, F41G7/30. Optiko-jelektronnaja sistema zenitno-raketnogo kompleksa [Optoelectronic system of anti-aircraft missile system] / Obrazumov V.I., Slugin V.G., Kisljak V.A., Beljanskij E.V., Kuz'mich Ja.L.; the applicant and the patentee Instrument Design Bureau; appl. 08.06.1999; publ. 20.04.2011 Bul. Number 11.
- Sistema tehnicheskogo zrenija Xpectia FH [Xpectia FH vision system] [Electronic resource] // URL: http://www.baltacom.com/sites/default/files/catalogue/pdfs/xpectia_selectrion_rus.pdf (accessed: 08.11.2017) [in Russian]
- Ankit Bhatia, Masaaki Kumagai and Ralph Hollis “Six-Stator Spherical Induction Motor for Balancing Mobile Robots” in proceedings of the International Conference on Robotics and Automation, Seattle, WA USA, May 26-30 2015
- Horn B.K.P. Zrenie robotov: Per. s angl. [Robots vision] / B.K.P. Horn – M.: Mir, 1989. – 487 p. [in Russian]
- Moshkin V.I. Tehnicheskoe zrenie robotov [Robots technical vision] / V. I. Moshkin, A. A. Petrov, V. S. Titov and others – M.: Mashinostroenie, 1990. – 272 p. [in Russian]
- Lipin A.V. Avtoreferat dissertacii na soiskanie uchenoj stepeni kandidata tehnicheskih nauk Razrabotka i issledovanie trehkoordinatnogo jelektroprivoda dlja manipuljatorov [The dissertation author's abstract on competition of a scientific degree of the candidate of engineering science Development and research of the three-coordinate electric drive for manipulators] [Electronic resource] / A.V. Lipin // URL: http://science.kuzstu.ru/wp-content/docs/OAD/Autoreferats/LipinAV.pdf (accessed: 10.10.2017) [in Russian]
- Gridin V.N. Adaptivnye sistemy tehnicheskogo zrenija [Adaptive systems of technical vision] / V.N. Gridin, V.S. Titov, M.I. Trufanov – M.: Nauka, 2009. – 442 p. [in Russian]
- Oshlakov, V.G. Opticheskaja instrumental'naja sistema orientirovanija v uslovijah nedostatochnoj vidimosti [Optical instrumental orientation system in conditions of low visibility] / Oshlakov V.G., Cvyk R.Sh., Iljushin Ja.A. // Tehnicheskoe zrenie v sistemah upravlenija 2012: sbornik trudov nauch.-tehn. konf. 14 -16 marta 2012 g. [Technical vision in management systems 2012: a collection of works of scientific and technical. conf. 14 -16 March 2012], Moskva / Uchrezhdenie Rossijskoj akademii nauk Institut kosmicheskih issledovanij RAN, FGUP "Gosudarstvennyj nauchno-issledovatel'skij institut aviacionnyh sistem", Uchrezhdenie Rossijskoj akademii nauk Institut prikladnoj matematiki im. M.V.Keldysha RAN [Establishment of the Russian Academy of Sciences Space Research Institute of the Russian Academy of Sciences, Federal State Unitary Enterprise "State Research Institute of Aviation Systems", Institute of Applied Mathematics pr. M.V. Keldysh of the Russian Academy of Sciences]. – Moskva, 2011. – pp.16 - 26
- Kuz'min, S.A. Sposoby povyshenija tochnosti vydelenija ob#ektov v videoposledovatel'nostjah [Methods to improve the accuracy of the selection of objects in video sequences] / Kuz'min S.A. // Tehnicheskoe zrenie v sistemah upravlenija 2012: sbornik trudov nauch.-tehn. konf. 14 -16 marta 2012 g. [Technical vision in management systems 2012: a collection of works of scientific and technical. conf. 14 -16 March 2012], Moskva / Uchrezhdenie Rossijskoj akademii nauk Institut kosmicheskih issledovanij RAN, FGUP "Gosudarstvennyj nauchno-issledovatel'skij institut aviacionnyh sistem", Uchrezhdenie Rossijskoj akademii nauk Institut prikladnoj matematiki im. M.V.Keldysha RAN [Establishment of the Russian Academy of Sciences Space Research Institute of the Russian Academy of Sciences, Federal State Unitary Enterprise "State Research Institute of Aviation Systems", Institute of Applied Mathematics pr. M.V. Keldysh of the Russian Academy of Sciences]. – Moskva, 2011. – pp.124 - 132
- Zejnalov, R.Sh. Sistema beskontaktnyh izmerenij parametrov vysokoskorostnyh ob#ektov [The system of contactless measurements of high-speed objects parameters] / Zejnalov R.Sh., Konushin A.S. // Tehnicheskoe zrenie v sistemah upravlenija 2012: sbornik trudov nauch.-tehn. konf. 14 -16 marta 2012 g. [Technical vision in management systems 2012: a collection of works of scientific and technical. conf. 14 -16 March 2012], Moskva / Uchrezhdenie Rossijskoj akademii nauk Institut kosmicheskih issledovanij RAN, FGUP "Gosudarstvennyj nauchno-issledovatel'skij institut aviacionnyh sistem", Uchrezhdenie Rossijskoj akademii nauk Institut prikladnoj matematiki im. M.V.Keldysha RAN [Establishment of the Russian Academy of Sciences Space Research Institute of the Russian Academy of Sciences, Federal State Unitary Enterprise "State Research Institute of Aviation Systems", Institute of Applied Mathematics pr. M.V. Keldysh of the Russian Academy of Sciences]. – Moskva, 2011. – pp.193 – 199
- Skanirujushhie lazernye dal'nomery (LIDAR) [Scanning Laser Rangefinders (LIDAR)] [Electronic resource] / A. Antonov // URL: https://www.soel.ru/upload/iblock/792/20160110.pdf (accessed: 10.11.2017). [in Russian]