Adaptation of neural network methods for analysing tomographic data in the inspection of fuel elements and rock cores
Adaptation of neural network methods for analysing tomographic data in the inspection of fuel elements and rock cores
Abstract
The work is devoted to the development of a method for non-destructive tomographic inspection of fuel elements and rock cores with the adaptation of deep learning architectures for automated structure analysis. An adaptation of the YOLO architecture is suggested for detecting uranium pellets in fuel elements, followed by DBSCAN clustering to eliminate multiple detections on consecutive slices. For the segmentation of the pore space of cores, the U-Net architecture with a pre-trained ResNet34 encoder has been adapted, ensuring segmentation accuracy with limited amounts of labelled data. The specifics of the tomography equipment, the method of training neural networks on labelled sections, and the structure of the software complex are described. The superiority of the suggested adapted methods over traditional approaches has been experimentally demonstrated: the detection accuracy of YOLO was 0.98 versus 0.85 for threshold segmentation.
1. Введение
Томографические методы исследования стали неотъемлемой частью современного промышленного контроля качества, находя применение в таких критически важных областях, как ядерная энергетика и нефтегазовая отрасль. С развитием технологий компьютерной и микротомографии появилась возможность получать детальные трехмерные изображения внутренней структуры объектов с разрешением порядка единиц или десятков микрометров. Однако обработка и анализ таких данных традиционными методами сопряжены с рядом ограничений: низкой скоростью обработки, субъективностью оценок и сложностью автоматизации.
В ядерной энергетике контроль пространственного распределения урановых шариков в топливных элементах является задачей первостепенной важности. Топливные элементы, представляющие собой углеродные цилиндры с тысячами урановых шариков, требуют равномерного заполнения для обеспечения тепловой устойчивости и эффективности реактора. Неравномерное распределение может привести к локальным перегревам и снижению КПД установки. Параллельно, в нефтегазовой отрасли критическое значение имеет определение транспортных свойств горных пород, в частности их проницаемости и пористости, что напрямую влияет на эффективность добычи углеводородов.
Классические подходы к решению обеих задач основаны на комбинации традиционных алгоритмов обработки изображений: фильтрации (медианные, билатеральные фильтры), сегментации (пороговая бинаризация, метод водораздела), морфологической обработки и последующей трехмерной реконструкции. Однако эти методы демонстрируют ограниченную эффективность при работе с низкоконтрастными изображениями и сложными структурами.
Несмотря на широкое распространение, классические методы обработки томографических данных характеризуются рядом принципиальных недостатков. Пороговая сегментация оказывается неэффективной при низком контрасте между фазами
, а метод водораздела склонен к избыточной фрагментации объектов, особенно в условиях шумов и артефактов реконструкции . В задачах детекции плотно упакованных сфер (например, урановых шариков) традиционные подходы не обеспечивают устойчивого разделения перекрывающихся объектов .В последние годы показано, что архитектуры глубокого обучения позволяют преодолеть эти ограничения. В частности, U-Net демонстрирует высокую устойчивость к шуму и способность точно восстанавливать границы даже при низком контрасте , , а YOLO обеспечивает надёжную детекцию перекрывающихся объектов за счёт обучения на аннотированных данных , . Настоящая работа опирается на эти достижения и адаптирует их под специфику промышленной томографии топливных элементов и кернов.
Целью данного исследования явилась разработка и адаптация методов глубокого обучения на основе архитектур YOLO и U-Net для автоматизации и повышения точности анализа томографических данных при неразрушающем контроле топливных элементов и кернов горных пород.
Задачами исследования являются:
1. Адаптация архитектуры YOLO для детекции урановых шариков на томографических срезах топливных элементов и реализация алгоритма кластеризации DBSCAN для устранения дублирующих срабатываний на последовательных срезах.
2. Адаптация архитектуры U-Net с предобученным энкодером ResNet34 для точной бинарной сегментации порового пространства в кернах горных пород.
3. Разработка и реализация геометрического метода на основе анализа 3D-масок для расчета ключевых транспортных свойств (общей и сквозной пористости, минимального сечения поровых каналов) сегментированных структур.
4. Экспериментальная оценка эффективности предложенных методов в сравнении с традиционными подходами (пороговая сегментация) по точности и скорости обработки.
2. Методы и принципы исследования
2.1. Сегментация на основе нейронных сетей и расчет транспортных свойств
Сегментация изображений представляет собой процесс разбиения цифрового изображения на однородные области — сегменты, — с присвоением каждому пикселю метки, отражающей его принадлежность к определённому классу объектов. Это упрощает анализ сложных изображений за счёт выделения структур, представляющих интерес. В цифровой петрофизике сегментация микротомографических изображений горных пород позволяет разделить пустотную (поровую) фазу и твердую (минеральную) матрицу. Такое бинарное разделение является необходимым этапом, поскольку дальнейшие расчёты характеристик пористой среды (например, пористости и проницаемости) требуют чёткого разграничения этих фаз.
В рамках аналитических моделей, описывающих пористость и проницаемость, широко применяются такие параметры, как общая пористость (доля объёма пор), сквозная пористость (доля пор, соединяющих противоположные грани образца), а также геометрические характеристики каналов. Сквозные поры — это соединённые каналы, проходящие от одной грани образца до противоположной; именно они определяют способность среды пропускать флюиды. Минимальное поперечное сечение (или «минимальная пора») сквозного канала определяется как наименьшая площадь его поперечного разреза вдоль основной оси.
Современные методы сегментации в значительной степени базируются на использовании сверточных нейронных сетей. Одной из наиболее успешных архитектурных реализаций является U-Net
. Данная архитектура включает энкодер, осуществляющий извлечение признаков с последовательным уменьшением пространственного разрешения, и декодер, восстанавливающий его посредством транспонированных свёрток. Ключевой особенностью U-Net являются пропуски (skip connections), передающие карты признаков с соответствующих уровней энкодера в декодер, что обеспечивает сохранение пространственного контекста при высокой локальной точности сегментации.Исходная работа
также подчёркивала эффективность данной архитектуры на ограниченных размеченных выборках благодаря широкому применению методов аугментации данных. Аугментации (например, повороты, отражения, масштабирование, добавление случайного шума и др.) позволяют существенно расширить обучающую выборку, улучшая обобщающую способность модели и снижая риск переобучения.Для повышения эффективности обучения и качества сегментации часто применяются предобученные энкодеры, такие как ResNet34, инициализированные на больших наборах изображений. Такие модели уже обладают способностью извлекать обобщённые визуальные признаки, что позволяет ускорить сходимость и повысить точность обучения на целевых задачах, включая сегментацию микроструктур. Использование ResNet34 в качестве энкодера в U-Net позволяет получить более качественные карты признаков и добиться улучшения сегментации при ограниченном объёме данных. Для сегментации порового пространства кернов адаптирована архитектура U-Net с предобученным на ImageNet энкодером ResNet34. Архитектура включает энкодер для извлечения признаков с уменьшением разрешения и декодер для восстановления пространственного разрешения через транспонированные свертки. Адаптация архитектуры включала: замену стандартного энкодера U-Net на ResNet34 с весами, предобученными на ImageNet, для улучшения извлечения признаков при ограниченном объеме данных; добавление в декодер слоев Dropout (вероятность 0.2) для регуляризации; применение L2-регуляризации (коэффициент 1e-5). Настройку финального слоя для бинарной сегментации (поры/матрица) .
2.2. Геометрический расчёт транспортных свойств
После сегментации порового пространства проводится численный анализ геометрии пор с целью определения их транспортных свойств. Пористость φ вычисляется как отношение количества пористых вокселей к общему числу вокселей в объёме образца. В рамках настоящей работы расчёт транспортных характеристик пористой среды осуществляется не с помощью традиционных численных методов моделирования фильтрации (например, уравнение Дарси или метод решётки Больцмана), а посредством геометрического подхода, основанного на анализе бинарных трёхмерных масок. Разработанная методика включает следующие ключевые этапы: формирование объёма, последовательная загрузка 2D-масок пор (чёрно-белых изображений) и объединение их в трёхмерный массив формы (Z, Y, X). Все значения выше заданного порога (например, threshold = 127) интерпретируются как поры (значение 1), остальные — как матрица (значение 0), что позволяет представить структуру как 3D-объём с воксельной дискретизацией. Определение связных компонент: с использованием функции scipy.ndimage.label проводится трёхмерная сегментация по 6-связности. Каждой связной пористой области присваивается уникальная метка (label), в результате чего формируется карта связных компонент и определяется их количество. Определение сквозных пор: каждая компонента проверяется на наличие соединения противоположных граней вдоль хотя бы одной оси. Такие поры классифицируются как сквозные и далее участвуют в расчётах. Расчёт минимального поперечного сечения: для каждой сквозной поры определяются три проекции, по которым находится минимальное количество пористых вокселей в любом срезе.
В качестве исходных данных использовались бинарные маски пористых структур, полученные в результате предварительной ручной или полуавтоматической разметки микротомографических изображений. Каждая маска представляет собой двумерное изображение в формате PNG, где белый цвет соответствует пористому пространству, а чёрный — минеральной матрице. Для восстановления полной трёхмерной структуры из двумерных сечений маски были упорядочены в соответствии с их положением по оси Z и объединены в единый объёмный массив. Размерность полученного массива (Z, Y, X) соответствует количеству срезов и разрешению каждого изображения по вертикали и горизонтали. При этом все изображения предварительно нормализованы по размеру, и, при необходимости, приведены к одинаковому формату с помощью билинейной интерполяции или обрезки. Были подготовлены два отдельных набора данных: набор A содержит 50 срезов размеченных масок, полученных из микротомографии пористой породы с высоким уровнем контрастности и чётко выраженными порами, набор B содержит 45 срезов, представляющих структуру породы с более неоднородной текстурой и наличием артефактов в изображениях. Каждое изображение предварительно прошло стадию предобработки, включающую бинаризацию, устранение шума и нормализацию контрастности. Все данные были разделены на обучающую, валидационную и тестовую выборки в соотношении 70:15:15, соответственно. Для тестирования финальных моделей применялись только данные, не участвовавшие в обучении.
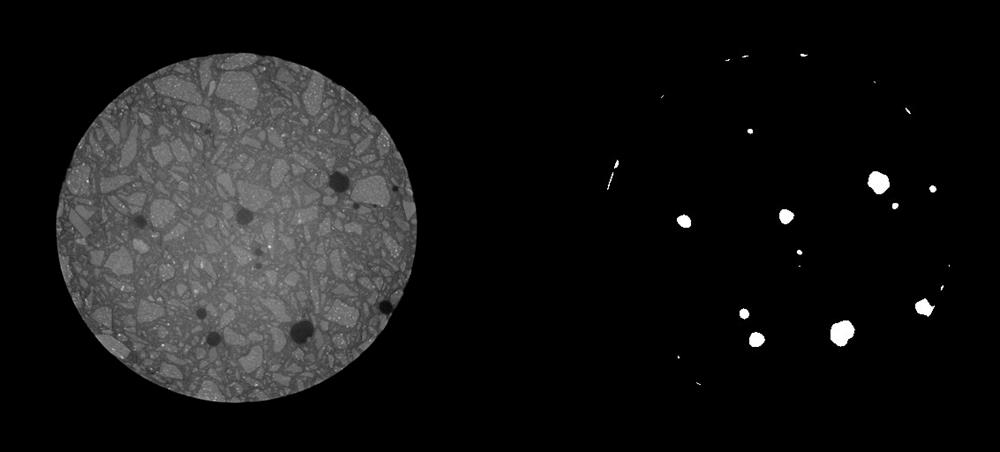
Рисунок 1 - Исходное изображение и его инвертированная маска
Модель YOLO (You Only Look Once) была выбрана для задачи детектирования урановых шариков благодаря её способности обрабатывать изображения в реальном времени с высокой точностью. Архитектура YOLO основана на свёрточных нейронных сетях, которые одновременно предсказывают координаты ограничивающих рамок (bounding boxes) и классы объектов. Модель, обученная на аннотированном датасете томографических срезов, идентифицировала шарики на каждом слое 3D-реконструкции.
Адаптация архитектуры включала: настройку входного слоя для обработки срезов размером 512×512 пикселей в градациях серого; изменение выходного слоя для детекции одного класса (урановые шарики); снижение порога уверенности до 0,5 для учета низкоконтрастных объектов. Увеличение параметра Non-Maximum Suppression (NMS) до 0,6 для разделения близко расположенных шариков.
Каждый томографический срез (в формате BMP) преобразовывался в трёхмерный массив с использованием библиотеки OpenCV
. Далее изображение подавалось на вход модели YOLO , которая возвращала координаты ограничивающих рамок для обнаруженных шариков. Центр каждого шарика рассчитывался как среднее арифметическое координат противоположных вершин рамки:где x1, y1 и x2, y2 — координаты левого верхнего и правого нижнего углов bounding box. Трёхмерная позиция фиксировалась добавлением координаты z, соответствующей номеру среза.
2.4. Кластеризация DBSCAN
Для устранения дубликатов, возникающих из-за пересечения шариков на соседних срезах, применялся алгоритм DBSCAN (Density-Based Spatial Clustering of Applications with Noise)
. Этот метод группирует точки, основываясь на плотности их распределения в пространстве, что позволяет выделять кластеры произвольной формы и игнорировать шумовые точки.Ключевые параметры алгоритма:
• eps(ε): максимальное расстояние между точками в одном кластере (15 пикселей);
• min_samples: минимальное количество точек для формирования кластера (2 точки).
Параметры были подобраны методом перебора по случайной сетке. Диапазон для eps варьировался от 10 до 20 пикселей, а для min_samples — от 1 до 3. Критерием выбора оптимальных значений стало максимальное число устойчивых кластеров при минимальном количестве шума. Например, при eps = 10 наблюдалась избыточная фрагментация, а при eps = 20 — объединение разных шариков в один кластер.
2.5. Оценка равномерности распределения
В качестве критерия равномерности использовалось соотношение количества шариков в верхней и нижней половинах цилиндра. Медианный срез делил цилиндр на две равные части. При этом нижней половине соответствовали срезы с z ≤ midz, а верхней половине соответственно срезы с z > midz.
Равномерное распределение характеризуется значением соотношения, близким к 1. Отклонение от этого значения указывает на асимметрию. Например, соотношение 0,80 означает, что в верхней половине на 20% меньше шариков, чем в нижней, что требует коррекции заполнения и возможного изменения ее технологии.
3. Основные результаты и их обсуждение
3.1. Получение данных и реконструкция
Для проверки работоспособности предложенного метода было произведено исследование топливного цилиндра и керна на установке для проведения томографического контроля. Выполнение исследования производилось на режиме 130 кВ, 100 мкА, 500 мс. В процессе томографии был получен набор проекционных данных из 800 угловых проекций с шагом 0,45° на проекцию. Исследование произведено по конусно-лучевой схеме, реконструкция выполнена на основе метода обратного проецирования с фильтрацией сверткой. Пример проекции исследуемого объекта и реконструированного среза представлен на рис. 2.
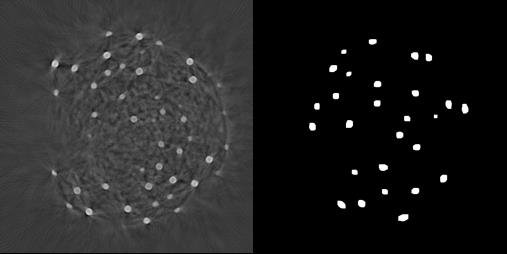
Рисунок 2 - Пример среза объекта и его сегментации
Для определения транспортных свойств использовалась описанная ранее сегментация с помощью U-net. В рамках данного исследования была реализована архитектура сегментационной модели на основе U-Net с энкодером ResNet34. Обучение и валидация модели проводились на наборе размеченных масок пор.
Аугментации включали следующие трансформации:
• повороты на угол ±90°;
• горизонтальные и вертикальные отражения;
• случайные масштабирования (scale range: 0,9–1,1);
• добавление гауссовского шума (σ = 0,01);
• изменения контраста и яркости в пределах ±20 %.
Модель обучалась с использованием функции потерь Dice Loss
, которая показала высокую эффективность в задачах бинарной сегментации при наличии несбалансированных классов. Оптимизация производилась с помощью алгоритма Adam. Обучение проводилось в течение 100 эпох с ранней остановкой при отсутствии улучшения Dice-метрики на валидационной выборке в течение 10 эпох .Для повышения устойчивости модели к переобучению применялась L2-регуляризация (коэффициент 1e–5), а также Dropout (с вероятностью 0,2) в слоях декодера. Модель реализована с использованием библиотеки PyTorch, обучение проводилось на графическом процессоре NVIDIA RTX 4060.
Функция потерь составила:
где LB — бинарная кросс-энтропия:
LD — Dice Loss:
Обучение велось с использованием ранней остановки при отсутствии улучшений на валидации в течение 3 эпох, сканирования градиентов (AMP) для ускорения и уменьшения потребления памяти, автоматической подстройки learning rate по метрике. В результате была получена точность детекции 0,98. Для сравнения была выполнена детекция на тех же срезах с использованием простого порогового преобразования, точность составила 0,85.
3.2. Качество сегментации
Результаты показали значительное превосходство модифицированной архитектуры U-Net с энкодером ResNet34 и использованием аугментаций по сравнению с базовой моделью.
Базовая U-Net, обученная без дополнительных преобразований данных, не справляется с выделением мелких пор и демонстрирует смазанность границ. Напротив, использование ResNet34 в качестве энкодера позволяет более эффективно извлекать высокоуровневые признаки, что особенно важно при наличии текстурных неоднородностей. Аугментации, имитирующие реальные искажения изображений, способствуют увеличению обобщающей способности модели и предотвращают переобучение. На изображениях можно видеть, что простая модель «забывает» мелкие поры и часто сглаживает границы. Модель с ResNet34 лучше обрабатывает как крупные, так и мелкие структуры (рис. 3). Существенно на улучшение модели повлияло уменьшение количества батчей и увеличение количества эпох (рис. 4).
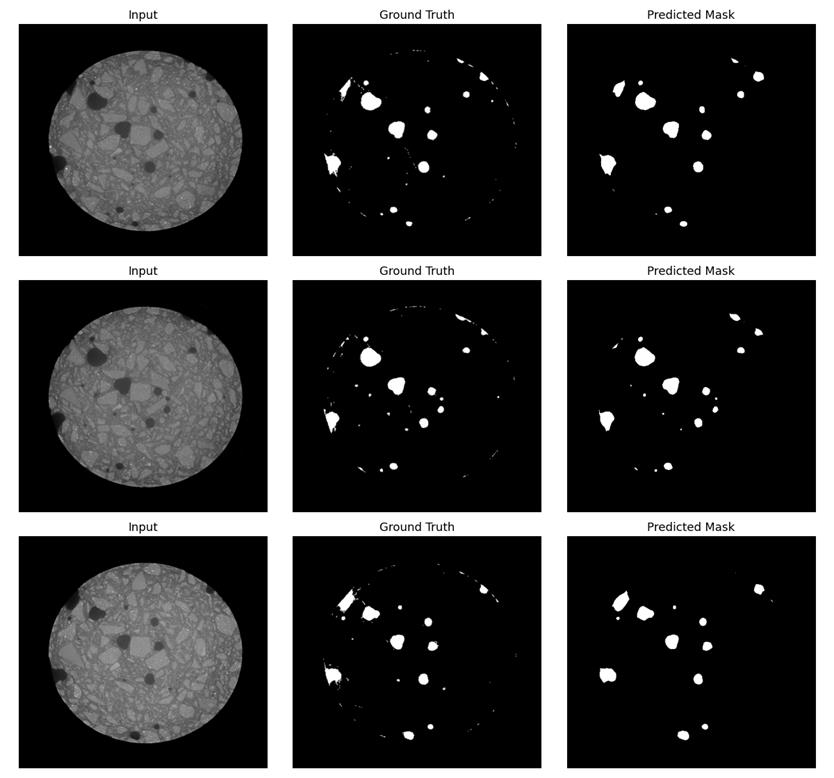
Рисунок 3 - Исходное изображение, реальная маска и предугаданная моделью без ResNet34 и применения аугментаций маска
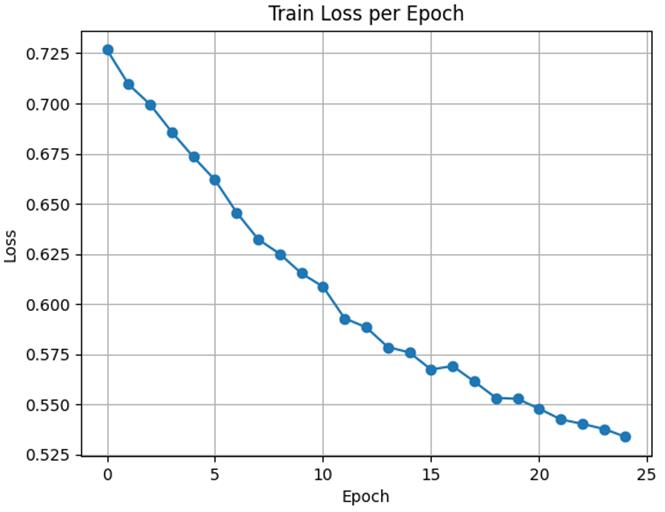
Рисунок 4 - График потерь модели без ResNet34 и применения аугментаций
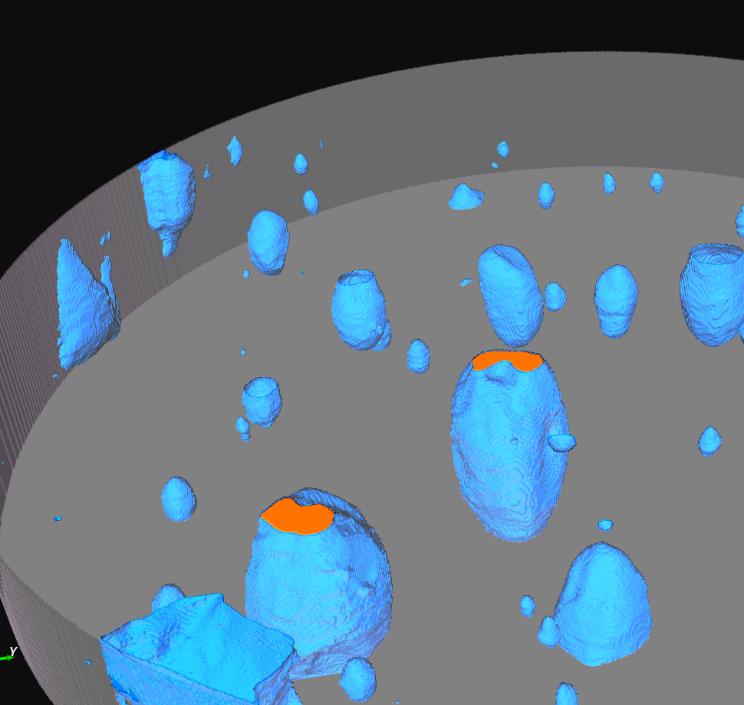
Рисунок 5 - Визуализация пор и минимального сечения сквозных пор
Для решения второй задачи — оценки количества шариков в топливном элементе была применена комбинация YOLO и DBSCAN, которая обеспечила точное обнаружение и устранение артефактов, а предложенный критерий равномерности позволил количественно оценить качество заполнения цилиндра.
3.3. Визуализация результатов
Для визуализации результатов работы предложенного метода использованы два подхода — отображение полученных кластеров на реконструированных срезах и трехмерная визуализация кластеров
. Для одного из тестовых объектов выполненные визуализации продемонстрированы на рис. 6 и 7.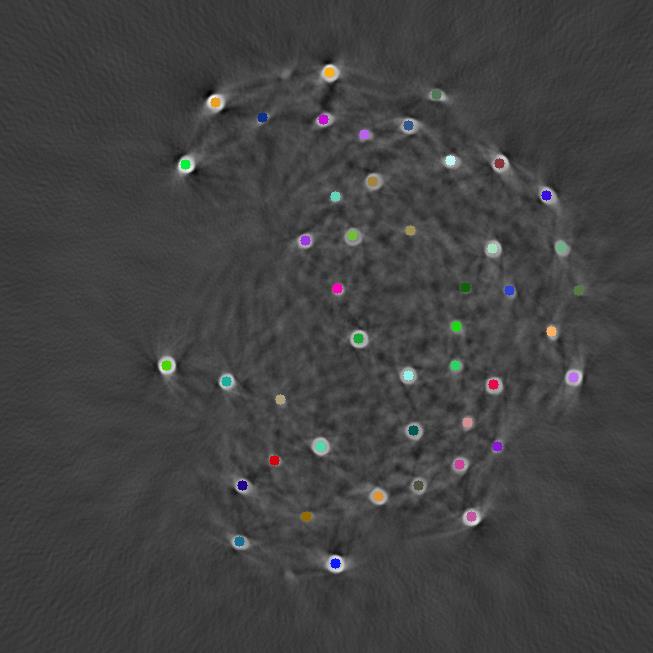
Рисунок 6 - Отображение кластеров на срезах
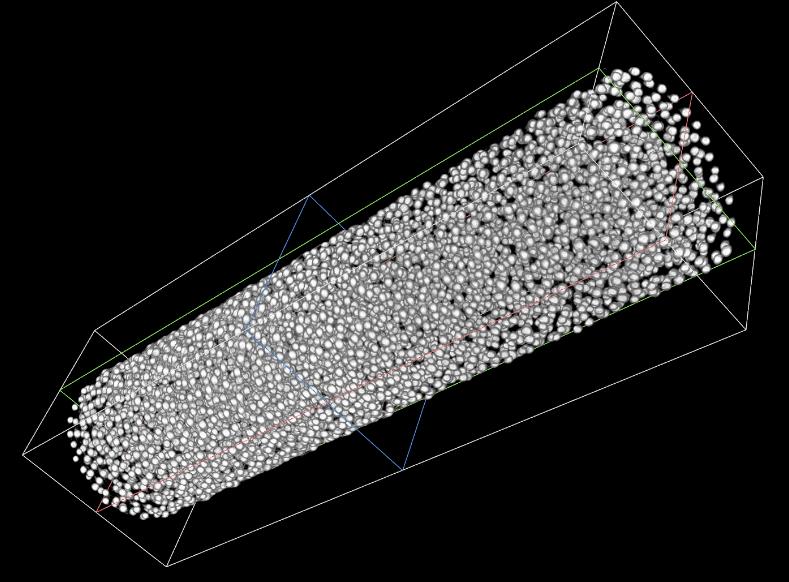
Рисунок 7 - Трехмерная визуализация кластеров
Для выполнения трехмерной визуализации применялись готовые модули языка Python. Библиотека VTK-python использовалась для построения трёхмерного графика, где каждая точка соответствовала центру кластера. Это дало возможность анализировать пространственное распределение шариков и выявлять зоны с повышенной плотностью.
Экспериментальные результаты показали, что модель YOLO достигает точности детекции (Precision) 0,98 на валидационной выборке, что подтверждено сравнением с ручной разметкой экспертов. Это существенно превосходит традиционные методы, такие как анализ на основе пороговой сегментации. Кроме того, предложенный подход позволяет сократить время обработки данных на 40% по сравнению с ручными методами.
Таким образом основными достигнутыми в работе результатами являются:
1. Разработка программного комплекса, интегрирующего адаптированные нейросетевые модели (YOLO, U-Net) и алгоритм DBSCAN для автоматизированного анализа томографических данных.
2. Достижение для задачи детекции урановых шариков точности (Precision) 0,98, что на 15% превосходит результат традиционной пороговой сегментации (0,85), при этом время обработки данных сокращено на 40% по сравнению с ручными методами.
3. Демонстрация значительного превосходства адаптированной модели U-Net с энкодером ResNet34 над базовой U-Net для задачи сегментации порового пространства, включающая способность точно сегментировать мелкие поры и четко определять границы даже на неоднородных и зашумленных изображениях.
4. Разработка и апробация геометрического подхода к расчету транспортных свойств, позволяющий на основе бинарных 3D-масок определять сквозную пористость и минимальные сечения поровых каналов, что обеспечивает высокую интерпретируемость и воспроизводимость результатов.
Новизна и оригинальность полученных результатов достигается тем, что впервые предложена и реализована комбинация адаптированных архитектур YOLO и U-Net с последующей 3D-кластеризацией DBSCAN для решения взаимосвязанных задач контроля в разных отраслях (ядерная энергетика и нефтегазовая геология) на едином методологическом основании, проведена целенаправленная адаптация известных архитектур под особенности низкоконтрастных томографических данных, включая модификацию порогов уверенности в YOLO, использование предобученного энкодера ResNet34 и специфичных аугментаций для U-Net, что позволило добиться высокой точности на ограниченных размеченных выборках.
4. Заключение
Полученные результаты демонстрируют, что интеграция предобученного энкодера ResNet34 в архитектуру U-Net существенно повышает качество сегментации сложных пористых структур. Использование аугментаций является необходимым условием достижения высокой точности при ограниченном объёме размеченных данных. Применённый геометрический подход к расчёту транспортных свойств, основанный на анализе бинарных 3D-масок, обеспечивает высокую интерпретируемость и воспроизводимость, а также легко масштабируется под различные задачи цифровой петрофизики. Предложенный методологический подход может быть использован как в прикладных задачах анализа керна, так и в фундаментальных исследованиях фильтрации, тепло- и массопереноса в пористых средах.
Предложенный метод демонстрирует эффективность в задаче автоматизированного контроля распределения урановых шариков в топливных элементах. Использование YOLO обеспечивает высокую точность детектирования, а кластеризация DBSCAN позволяет устранить артефакты, связанные с многократным обнаружением одного шарика на соседних срезах. Разделение цилиндра на половины и сравнение количества шариков в них даёт простую метрику для оценки равномерности.
Работа вносит вклад в развитие автоматизированных систем контроля качества для ядерной отрасли, обеспечивая высокую точность и воспроизводимость результатов. Дальнейшие исследования могут быть направлены на оптимизацию параметров кластеризации и интеграцию методов глубинного обучения для работы с низкоконтрастными изображениями.