SYSTEM OF AUTOMATIC SPEED CONTROL OF BELT CONVEYOR ORE CONVEYOR FOR METALLURGICAL PRODUCTION
SYSTEM OF AUTOMATIC SPEED CONTROL OF BELT CONVEYOR ORE CONVEYOR FOR METALLURGICAL PRODUCTION
Abstract
The work examines the possibility of using a generalized regulator in the system of automatic control of belt conveyor speed under the action of disturbing influences of harmonic type to ensure a given productivity of ore transportation. Disturbances in the environment of transport conveyors cause a drop in productivity due to fluctuations in the load of the executive mechanism, which leads to a change in speed. As typical, perturbing influences are regarded as influences of harmonic type, approximating the description of perturbations. To suppress the influence of such disturbances on the quality of belt conveyor speed stabilization, a generalized regulator is proposed to be used in the work, which represents a parallel inclusion of a proportional-integral (PI) regulator and a regulator with an embedded model of the disturbing influence in the error loop. In a closed-loop system, the generalized controller allows to ensure first-order astaticity with respect to the setting action and complete suppression of disturbing influences, the description of which is given by the same model as the built-in model of the generalized controller.
1. Введение
Ленточные конвейеры – распространенные транспортные средства, применяемые в шахтах и карьерах для транспортирования руды и породы из проходческих, вскрышных, добычных забоев по горизонтальным и наклонным выработкам горных предприятий, для подъёма руды на поверхность с последующим её перемещением к обогатительной фабрике или погрузочному пункту внешнего транспорта, а породы — в отвал , , . Одна из актуальных задач горного производства – качественное функционирование системы автоматического управления ленточным конвейером, обеспечивающее заданную производительность. В процессе эксплуатации ленточного конвейера можно выделить основные возникающие возмущения, такие как неравномерное поступление объемной массы, неоднородность размеров, состава, прочности и влажности подаваемой руды, изменение напряжения питания , . Негативным последствием этих возмущений является нестабильная скорость движения ленты, пиковые нагрузки на натяжение ленты и на другие конструктивные элементы конвейера, приводящие к падению его производительности.
Цель работы – поддержание заданной технологическим процессом скорости движения ленты конвейера при действии возмущающих воздействий для обеспечения производительности.
2. Постановка задачи
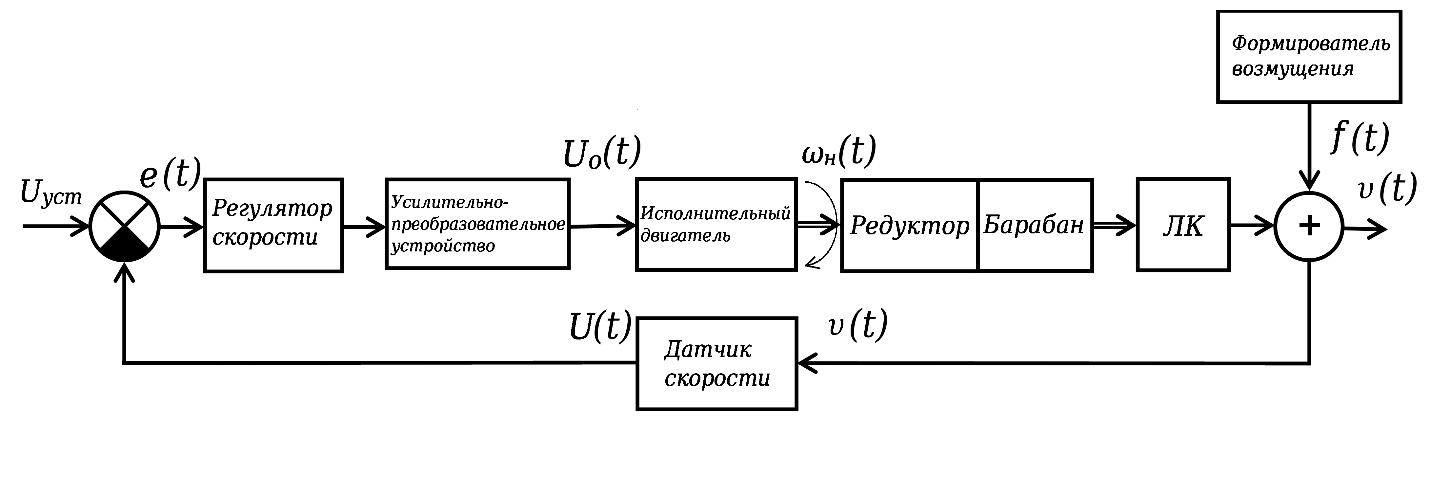
Рисунок 1 - Функциональная схема системы автоматического регулирования скорости ленточного конвейера
- объект управления - ленточный конвейер ЛК, v(t)- линейная скорость перемещения ленты конвейера;
- исполнительный механизм, включающий двигатель с редуктором, барабаном и усилительно-преобразовательным устройством, ωн (t) – номинальное значение скорости вращения двигателя, U(t) – напряжение обратной связи;
- первичные измерительные преобразователи - датчик скорости
перемещения ленты конвейера и натяжения ленты, U(t) – напряжение пропорциональное скорости движения ленты;
- обобщенный регулятор, вырабатывающий управляющие воздействия по текущей информации о скорости перемещения ленты конвейера и значении заданной скорости;
- задающее устройство, вырабатывающее задающий сигнал Uуст, соответствующий требуемой скорости перемещения ленты конвейера по регламенту технологического процесса;
- f(t) – возмущающие воздействия.
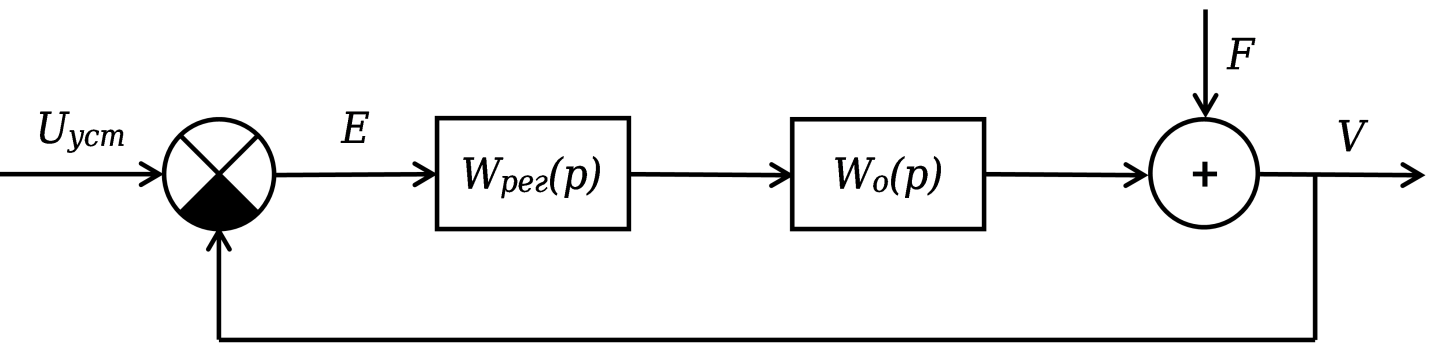
Рисунок 2 - Структурная схема системы
- показатели качества переходных процессов в виде времени переходного процесса tп ≤tп*, где tп – время переходного процесса системы, tп* – желаемое время переходного процесса и величины перерегулирования σ ≤ σ*, где σ – перерегулирование системы, σ* - допустимое значение перерегулирования;
- точностные показатели в виде в виде максимально допустимой ошибки eмах отработки заданной скорости конвейера и возмущающих воздействий (перегрузка, недогрузка, растяжение ленты), описываемых в первом приближении гармоническим воздействием вида f(t) = f0sin(ωt), где f0 – амплитуда гармонического воздействия, ω – круговая частота. Параметры возмущающего воздействия ограничены максимально допустимым значением амплитуды f0* (f0 ≤ f0*) и диапазоном изменения круговой частоты ωmin≤ω≤ωmax.
3. Методика проведения исследований
Предлагается для решения поставленной задачи использовать обобщенный регулятор, содержащий две составляющие , , , . Первая составляющая, обеспечивает пропорционально-интегральный закон управления, а вторая составляющая обеспечивает закон управления по встроенной модели внешнего воздействия. Первая составляющая обеспечивает в замкнутой системе требуемые показатели по качеству переходных процессов – времени переходных процессов, значению перерегулирования и точностные характеристики в виде добротности по скорости и соответствующему значению ошибки при отработке входного воздействия с постоянной скоростью , , . В целях получения нулевой установившейся ошибки при отработке возмущающего воздействия данного типа в контур управления вводится вторая составляющая на основе знания модели внешнего воздействия. Предполагается, что анализ класса возмущающих воздействий позволил выделить наиболее существенные возмущения, приводящие к возникновению наибольших ошибок и получить модель их возникновения в виде автономного дифференциального уравнения.
Передаточная функция ПИ составляющей регулятора
где kи коэффициент передачи интегральной составляющей, kп коэффициент передачи пропорциональной составляющей.
Для данной системы типовым возмущающим воздействием является гармоническое воздействие с максимальным значением амплитуды f0* = 0,2v* и круговой частотой ω0 (f(t) = f0*∙sinω0t). Моделью, которая генерирует подобное воздействие, является консервативное звено, описание которого задается передаточной функцией внешнего воздействия
а амплитуда сгенерированного сигнала определяется заданием начальных условий.
Передаточная функция составляющей регулятора с встроенной моделью
где kв и kм – настроечные параметры регулятора со встроенной моделью, kв –коэффициент передачи по выходной переменной встроенной модели, kм – коэффициент передачи по скорости изменения выходной переменной. Передаточная функция Wвм(p) содержит описание консервативного звена и описание дифференцирующего звена с постоянной времени . Модель, генерирующая гармоническое воздействие частоты ω0 описывается также консервативным звеном, поэтому составляющая с передаточной функцией Wвм(p) консервативного звена, и называют составляющей регулятора со встроенной моделью.
Обобщенный регулятор (рис. 3) формируется как параллельное соединение двух составляющих регулятора и его передаточная функция равна
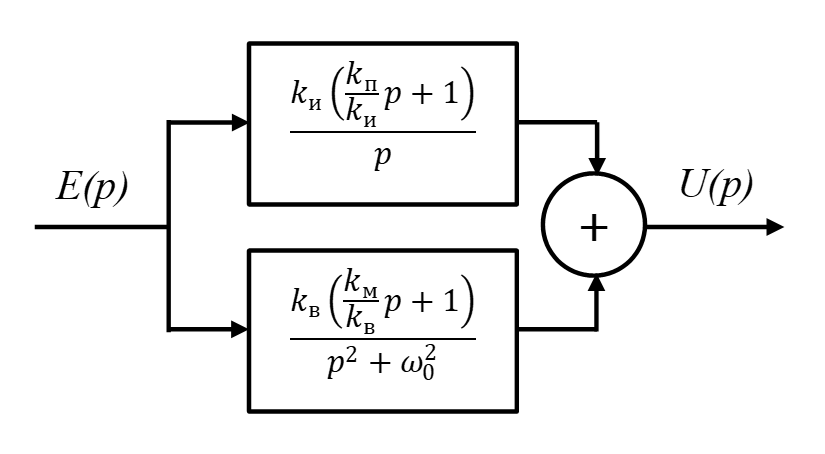
Рисунок 3 - Структура обобщенного регулятора
4. Результаты моделирования
Проиллюстрируем приведенные результаты на примере настройки параметров регулятора ленточного конвейера КЛС-800. Передаточная функция W0(p) имеет вид:
Требуемые показатели качества для системы стабилизации скорости ленты конвейера:
- максимальное значение скорости движения ленты v* = 3м/c
- значение добротности по скорости К*≥10 с-1
- максимально допустимая ошибка отработки заданной скорости конвейера и возмущающих воздействий eмах= 0,05 м/c.
- желаемое время переходного процесса tп* = 0,6 с,
- допустимое значение перерегулирования σ*=30%,
- возмущающее воздействие гармоническое с максимальными значениями амплитуды
f0* = 0,2v* и осредненным значением круговой частоты ω0= 0,314 с-1,
Перепишем передаточную функцию регулятора (4) в виде
и выберем согласно методу настройки на модульный оптимум значения , где Т0max - максимальное значение постоянной времени исходного объекта. Тогда передаточная функция регулятора примет вид
При этом, постоянная времени дифференцирующего звена регулятора равнаz компенсирует наибольшую постоянную времени постоянной апериодических звеньев объекта.
Отметим, что добротность по скорости рассматриваемой системы, как это следует из вида передаточных функций (5) и(6), равна , поэтому коэффициент kи выбирается из требуемого значения добротности по скорости
, a коэффициент
.
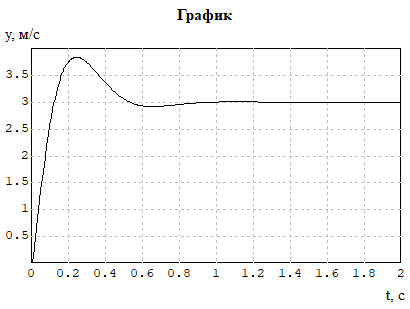
Рисунок 4 - Реакция системы на отработку заданной скорости транспортировки
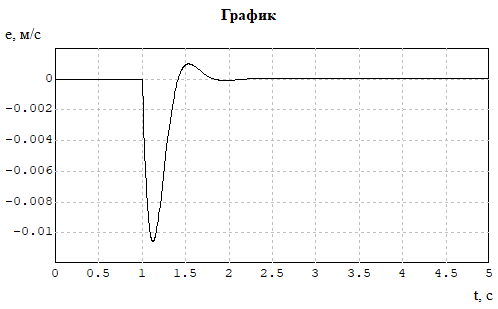
Рисунок 5 - График изменения ошибки e(t) системы с обобщенным регулятором при гармоническом возмущающем воздействии f(t) = 0,6 sin 0,314t
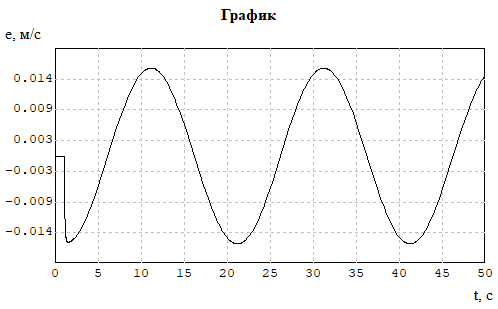
Рисунок 6 - График изменения ошибки e(t) системы ПИ регулятором при гармоническом входном воздействии f(t) = 0,6 sin 0,314t
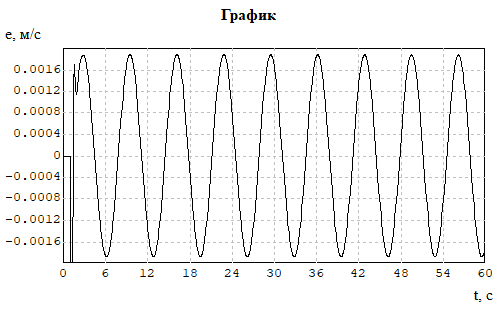
Рисунок 7 - График изменения ошибки e(t) системы с обобщенным регулятором при гармоническом возмущающем воздействии f(t) = 0,6 sin 0,942t
Уменьшение значения частоты гармонического возмущения в три раза f(t) = 0,6sin0,105t приводит к значению амплитуды установившейся ошибки eу = 0,0008с-1 и подавление в 750 раз. С ПИ регулятором значение амплитуды установившейся ошибки eу = 0,0055 м/с, подавление возмущающего воздействия происходит в 109 раз. Таким образом можно сделать вывод, что в диапазоне частот ω [0,105, 0,942] амплитуда установившего значения ошибки при отработке возмущающих воздействий f(t) = f0*sinωt не превосходит значения eу* = 0,002 м/с, а подавление возмущения происходит не хуже, чем в 500 раз.
5. Заключение
Введение в систему управления конвейером алгоритма достижения требуемых показателей по качеству и точности процесса стабилизации скорости конвейера обеспечивает поддержание скорости на необходимом уровне при наличии возмущающих воздействий, таких как перегрузка, недогрузка, растяжение ленты, неоднородность размеров и массы. Полученный алгоритм управления решает задачу стабилизации скорости ленточного конвейера, компенсации возмущающих воздействий и обеспечивает постоянную производительность.
Поддержание постоянства скорости ленты положительно сказывается на работе конвейера и позволяет обеспечивать необходимую производительность при наличии возмущающих воздействий скорости конвейера. Результаты моделирования системы стабилизации скорости ленты конвейера подтверждают сделанные выводы. Результаты статьи могут найти применение для настройки параметров автоматических регуляторов систем управления транспортировкой руды дробильного агрегата, шаровой мельницы с целью повышения производительности на горно-обогатительных комбинатах.
В работе предлагается для подавления возмущающих воздействий гармонического вида, приложенных к выходу системы стабилизации скорости ленточного конвейера, использовать регулятор с встроенной моделью, представляющий объединение ПИ регулятора и дополнительной составляющей с встроенной моделью возмущающего воздействия. Подобный обобщенный регулятор позволяет обеспечить в системе нулевую ошибку в установившемся режиме при отработке гармонического возмущающего воздействия усредненной частоты, модель которой встраивается в регулятор. Показано, что для гармоник с частотами, отличающимися от осредненной частоты, имеет место достаточно хорошее подавление возмущающих воздействий. Для трехкратного изменения значения усредненной частоты подавление возмущения в примере происходит не хуже, чем в 300 раз. Так же с помощью моделирования можно устанавливать диапазон частот, где выполняется заданное ограничение на амплитуду установившегося значения ошибки. На основе типовых методов синтеза регуляторов предложена процедура определения значений настроечных параметров обобщенного регулятора.