DETERMINATION OF THE AMENDMENT TO SLIDE IN A FREQUENCY-REGULATED ASYNCHRONOUS ELECTRIC DRIVE

Афанасьев А.П.
Кандидат технических наук, Приамурский государственный университет имени «Шолом-Алейхема» г. Биробиджан
ОПРЕДЕЛЕНИЕ ПОПРАВКИ НА СКОЛЬЖЕНИЕ В ЧАСТОТНО-РЕГУЛИРУЕМОМ АСИНХРОННОМ ЭЛЕКТРОПРИВОДЕ
Аннотация
Предложена усовершенствованная схема управления электроприводом в рабочих пределах изменения момента и скорости. Разработаны имитационные модели электропривода, имитирующие работу в обычном режиме и с учетом оптимизации скольжения.
Показано, что в заданных границах изменения нагрузочных моментов и оборотах привода по параметру эффективности предложенная модель управления дает более высокие результаты.
Предлагаемая схема управления с учетом оптимизации скольжения эффективнее, чем схема ![]() регулированием, за счет меньших электромагнитных потерь в обмотке ротора.
регулированием, за счет меньших электромагнитных потерь в обмотке ротора.
Ключевые слова: управляемый асинхронный электропривод, оптимизация скольжения, имитационная модель управления, частотно-регулируемый электропривод.
Afanasyev A.P.
PhD in Engineering, Sholem Aleichem Amur State University, Birobidzhan
DETERMINATION OF THE AMENDMENT TO SLIDE IN A FREQUENCY-REGULATED ASYNCHRONOUS ELECTRIC DRIVE
Abstract
An improved control scheme of the electric drive within the working limits of the torque and speed variation is proposed. Simulation models of the electric drive simulating the work in the normal mode and taking into account slip optimization are developed.
It is shown that within the given limits of variation of load moments and drive speeds by the efficiency parameter, the proposed control model gives better results.
The proposed control scheme, taking into account the slip optimization, is more effective than ![]() the control circuit, due to the smaller electromagnetic losses in the rotor winding.
the control circuit, due to the smaller electromagnetic losses in the rotor winding.
Keywords: controlled asynchronous electric drive, slip optimization, simulation control model, frequency-controlled electric drive.
Введение
Асинхронные электродвигатели являются наиболее простыми в конструкции и, следовательно, недорогими в производстве. Данные качества определяют их основные конкурентные преимущества в сравнении с другими типами электропривода. Доля асинхронных электроприводов в промышленном производстве занимает порядка 70%.
К недостаткам асинхронных двигателей, до последнего времени, можно было отнести их слабую управляемость по скорости и моменту на валу двигателя. При низких нагрузках коэффициент полезного действия данных двигателей имеет тенденцию к резкому убыванию по причине возрастающих потерь обмотке и сердечнике статора [1, С 105], [2].
Для уменьшения этих потерь необходимо сбалансировать магнитный поток между статором и ротором, т.е. иметь возможность влиять на скорость (число оборотов) электропривода и напряжение статорных обмоток.
Достаточно много отраслей промышленного хозяйства, где востребованы электрические приводы с высокими показателями эффективности во всех рабочих диапазонах изменения нагрузки и частоты вращения. В качестве примера можно привести электроприводы горно-обогатительного оборудования.
Эффективность работы электропривода можно повысить за счет точного выбора параметров управляющих воздействий соответствующих текущим условиям работы.
Существует несколько способов управления скоростью асинхронного двигателя. Наиболее распространенные из них приведены на диаграмме, представленной на рис. 1.
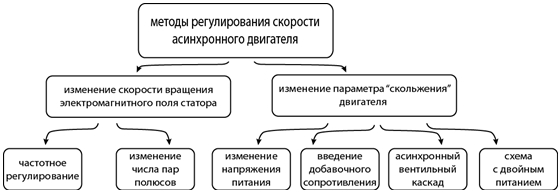
Рис. 1 – Способы регулирования скорости асинхронного двигателя
Одним из традиционных способов управления двигателем является изменение величины питающего напряжения.
Развиваемый двигателем электромагнитный момент определяется в соответствии с соотношением:
![]() (1)
(1)
Графически соотношение определяющее зависимость электромагнитного момента от скольжения, т.е. – (1) представлено на рис. 2.
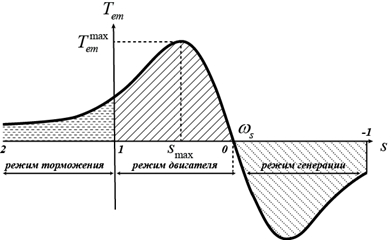
Рис. 2 – Зависимость момента асинхронного двигателя от скольжения
Из соотношения (1) и графического представления зависимости ![]() видно, что электромагнитный момент пропорционален квадрату напряжения
видно, что электромагнитный момент пропорционален квадрату напряжения ![]() и сложным образом зависит от величины скольжения s.
и сложным образом зависит от величины скольжения s.
В настоящее время в проектируемые системы управления асинхронными электроприводами используют «классическое» ![]() регулирование, которое позволяет обеспечить неизменность критического момента и, следовательно, постоянство перегрузочной способности двигателя практически во всем диапазоне регулирования скорости.
регулирование, которое позволяет обеспечить неизменность критического момента и, следовательно, постоянство перегрузочной способности двигателя практически во всем диапазоне регулирования скорости.
Исследования [3], [4], [5], [6] показали, что постоянство отношения напряжения статора к частоте ![]() не соответствует оптимальным параметрам энергопотребления асинхронного двигателя.
не соответствует оптимальным параметрам энергопотребления асинхронного двигателя.
Для получения оптимальной эффективности работы привода во всех диапазонах изменения момента и скорости был предложен механизм компенсации скольжения, обобщенная функциональная схема которого представлена на рис 3. С помощью данной функциональной схемы реализуется алгоритм скалярного управления электроприводом. Подробное описание элементов схемы можно найти в [2, С 14].
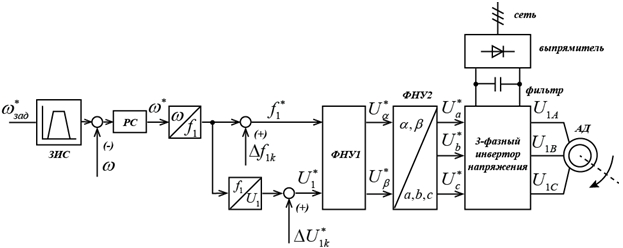
Рис. 3 – Функциональная схема частотно-регулируемого электропривода со скалярным управлением
Управление (компенсация) скольжением возможно соответствующим выбором добавки напряжения к заданному напряжению на зажимах статора, которое на рис.3 имеет обозначение ![]() .
.
Существует несколько модификаций метода компенсации скольжения.
В данной статье предлагается метод, в основе которого лежит идея использования ПИД –регулятора, в частности, предложено дополнить систему управления интегральным регулятором.
Модель блока управления скольжением
Для компенсации скольжения относительно оптимального значения было предложено использовать интегральный регулятор (2), который позволяет получить значение добавочного напряжения ![]() не только для текущего отклонения скольжения от номинальной величины, но и учитывать всю «историю» данных отклонений [7].
не только для текущего отклонения скольжения от номинальной величины, но и учитывать всю «историю» данных отклонений [7].
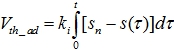 (2)
(2)
В ходе реализации предложенного подхода для блока управления скольжением была создана имитационная SIMULINK модель [8], [10].
На рис. 4 представлена модель блока управления, которая является частью общей модели имитационного эксперимента по определению параметров эффективности работы асинхронного двигателя в различных тестовых режимах. Блоки, выделенные цветом, реализуют рабочий алгоритм интегрального ПИД регулятора.

Рис. 4 – Схема контроллера блока оптимизации скольжения
На рис. 5 представлена общая модель асинхронного электропривода с блоком оптимизации скольжения, в которой блок «S-controller» является системой управления питающего напряжения.
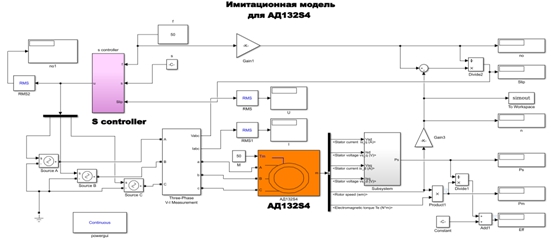
Рис. 5 – Имитационная модель асинхронного электропривода с блоком оптимизации скольжения
В качестве входных параметров блок «S-controller» принимает заданное значение частоты питающего напряжения – f, требуемое значение скольжения – s, обусловленное конструкцией двигателя и текущим режимом работы электропривода, и действительное значение скольжения – Slip, полученное с датчиков измерительных блоков электропривода.
На выходе блока «S-controller» получается значение питающего напряжения двигателя с учетом поправки на скольжение, полученной с помощью интегрального ПИД регулятора.
Результаты моделирования
На рисунке 6 представлены графики зависимости коэффициента полезного действия от нагрузочного момента и частоты вращения двигателя без учета компенсации скольжения и с учетом компенсации скольжения с применением интегрального ПИД регулятора.
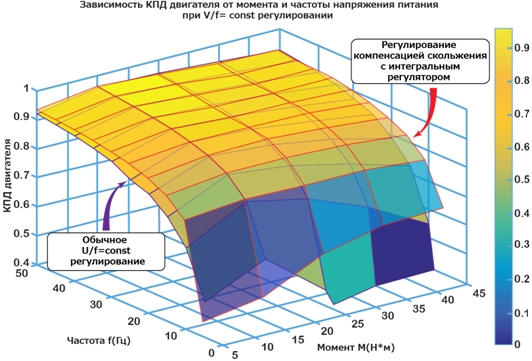
Рис. 6 – Графики зависимости КПД двигателя от нагрузочного момента и частоты напряжения питания
Представленные графики показывают, что практически на всем диапазоне частот напряжения питания и изменения нагрузочного момента коэффициент полезного действия двигателя с блоком компенсации скольжения имеет более высокие значения.
В области малых частот и моментов нагрузки коэффициент полезного действия привода с интегральным регулятором превышает этот же показатель для привода с обычным ![]() регулированием на 30-40%.
регулированием на 30-40%.
На рис.7 представлен срез графика на частоте 10 Гц, из которого следует, что на данной частоте во всем диапазоне изменения нагрузочного момента КПД двигателя с интегральным регулятором превышает КПД двигателя с обычным ![]() регулированием
регулированием
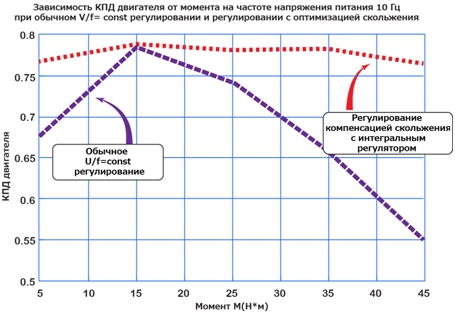
Рис. 7 – Срез графика КПД на частоте питающего напряжения 10 Гц
Рис. 8 иллюстрирует работу интегрального регулятора блока оптимизации скольжения при пониженных оборотах двигателя и нагрузочного момента, равного 15 Н*м.
Как видно из рис. 8 на начальном этапе имитации значение скольжения в моделях с оптимизацией и без оптимизации не определено и подвержено резким скачкам, так как этот период приходится на режим пуска двигателя.
В дальнейшем, по мере накопления интегралом «истории отклонений» скольжения от оптимального значения, скольжение в модели с интегральным регулятором принимает более низкие значения в сравнении с моделью, в которой используется обычное ![]() регулирование.
регулирование.
Меньшая величина скольжения приводит к уменьшению потерь в обмотке ротора, так как эти потери прямо пропорциональны скольжению ![]() , здесь
, здесь ![]() – электромагнитная мощность двигателя [1], [9, С 216].
– электромагнитная мощность двигателя [1], [9, С 216].

Рис. 8 – Значения скольжений асинхронного двигателя с учетом и без учета оптимизации при заданных условиях
Вывод
Предложенный алгоритм компенсации скольжения на основе интегрального компонента ПИД регулятора позволяет повысить коэффициент полезного действия асинхронного электропривода от 5 до 40% практически во всем диапазоне изменения момента нагрузки и частоты вращения.
Блок управления с интегральным регулятором позволяет работать приводу с меньшим скольжением, в результате чего уменьшаются потери в обмотке ротора, и, следовательно, повышается эффективность работы электропривода в целом.
В настоящее время реализация данного алгоритма управления электроприводом вполне осуществима на основе микропроцессорной техники.
Список литературы / References
- Вольдек А.И. Электрические машины. Машины переменного тока: учебник для вузов / А. И. Вольдек, В.В. Попов. – СПб.: Питер, 2010.– 350 с.
- Мальцева О.П. Системы управления электроприводов: Учебное пособие / О.П. Мальцева, Л.С. Удут, Н.В. Кояин. – Томск: Изд. ТПУ, 2007. -151 с.
- Sarhan H. Energy Efficient Control of Three-Phase Induction Motor Drive / H. Sarhan // Energy and Power Engineering. –2011. –Vol. 3. –P. 107-112.
- Ansari A. Induction Motor Efficiency Optimization Using Fuzzy Logic / A Ansari, D. M. Deshpande // International Journal of Advanced Engineering and Applications, –Vol. 1. –2010, –P. 177–180.
- W. Leonhard Controlled AC Drives, a Successful Transfer from Ideas to Industrial Practice / Leonhard W. // Control Engineering Practice. –1996. –Vol. 4(7). ––P. 897–908.
- Li J. A new efficiency optimization method on vector control of induction motor/ J. Li L. Xu Z. Zhang // Proc. IEEE Conf. Electrical Machines and Drives. –2005. –P. 1995-2001
- Ben Hamed M. A Digital Phase Locked Loop Speed Control of Three Phase Induction Motor Drive: Performances Analysis, International Journal of Energy and Power Engineering/ M. Ben Hamed, L. Sbita // EPE Journal. - Brussel, –2011. – Vol 3. - P. 61-68
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink / И. В. Черных. – М.: ДМК Пресс, 2007. –288 с.
- Усольцев А.А. Электрические машины: учебное пособие. / А.А.Усольцев. – СПб: – НИУ ИТМО, 2013. – 416 с.
- Chee-Mun O. Dynamic Simulation of Electric Machinery using Matlab/Simulink / O. Chee-Mun. –New Jersey; Prentice-Hall, 1998. – 467 p.
Список литературы / References in English
- Vol'dek A. I. Jelektricheskie mashiny. Mashiny peremennogo toka: uchebnik dlja vuzov [The electric machine. AC machines: textbook for universities] / A. I. Vol'dek, V.V. Popov. – SPb.: Piter, 2010.– 350 p.[in Russian]
- Mal'ceva O.P. Sistemy upravlenija jelektroprivodov: Uchebnoe posobie [Systems of electric drives control: textbook]/ O.P. Mal'ceva, L.S. Udut, N.V. Kojain. – Tomsk: Izd. TPU, 2007. -151 p. [in Russian]
- Sarhan H. Energy Efficient Control of Three-Phase Induction Motor Drive / H. Sarhan // Energy and Power Engineering. –2011. –Vol. 3. –P. 107-112.
- 4 Ansari A. Induction Motor Efficiency Optimization Using Fuzzy Logic / A Ansari, D. M. Deshpande // International Journal of Advanced Engineering and Applications, –Vol. 1. –2010, –P. 177–180.
- W. Leonhard Controlled AC Drives, a Successful Transfer from Ideas to Industrial Practice / Leonhard W. // Control Engineering Practice. –1996. –Vol. 4(7). ––P. 897–908.
- Li J. A new efficiency optimization method on vector control of induction motor/ J. Li L. Xu Z. Zhang // Proc. IEEE Conf. Electrical Machines and Drives. –2005. –P. 1995-2001
- Ben Hamed M. A Digital Phase Locked Loop Speed Control of Three Phase Induction Motor Drive: Performances Analysis, International Journal of Energy and Power Engineering/ M. Ben Hamed, L. Sbita // EPE Journal. - Brussel, –2011. – Vol 3. - P. 61-68
- 8. Chernyh I. V. Modelirovanie jelektrotehnicheskih ustrojstv v MATLAB, SimPowerSystems i Simulink [Modeling of electrical devices in MATLAB, SimPowerSystems and Simulink]/ I. V. Chernyh. – M.: DMK Press, 2007. –288 p. [in Russian]
- Usol'cev A.A. Jelektricheskie mashiny: uchebnoe posobie. [Electrical machines: textbook.]/ A.A. Usol'cev. – SPb: – NIU ITMO, 2013. – 416 p. [in Russian]
- Chee-Mun O. Dynamic Simulation of Electric Machinery using Matlab/Simulink / O. Chee-Mun. –New Jersey; Prentice-Hall, 1998. – 467 p.