STABILITY OF MOTION OF THE SIEVE CLEANER MVP-8 (RP-50)

Иванов Н.М.1, Лапшин Н.П.2
1Доктор технических наук, директор ГНУ «СибИМЭ Россельхозакадемии»; 2Кандидат технических наук, ФГОУ ВПО «Государственный аграрный университет Северного Зауралья»
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ РЕШЕТНОГО ОЧИСТИТЕЛЯ МВР-8 (РП-50)
Аннотация
Изучено движение решетного стана, подвешенного к раме машины на тросовых подвесках и получающего движение от электродвигателя, ременной передачи и дебалансного устройства. Установлено, что различные точки решетного стана совершают движения по различным траекториям, что характеризуется потерей устойчивости движения и нарушением технологического режима. Приведены условия устранения этого явления за счет подбора оптимальных динамических параметров решетного стана.
Ключевые слова: решётный стан, канат, амплитуда колебаний, устойчивость движения.
Ivanov N.М.1, Lapshin N.P.2
1PhD in Engineering, director of Siberian Research Institute of Mechanization and Electrification RAAS, 2PhD in Engineering, Agriculture State University of Northern Zauralye
STABILITY OF MOTION OF THE SIEVE CLEANER MVP-8 (RP-50)
Absctract
Studied the motion of the sieve mill, suspended from the frame of the machine for cable racks and receiving motion from the electric motor, a belt transmission and unbalanced devices. It is established that different points of the sieve mill moving on different trajectories, which is characterized by loss of movement stability and the violation of technological mode. These conditions eliminate this phenomenon by choosing the optimal dynamic parameters of the sieve mill.
Key words: sieve pan, the rope, the amplitude of oscillations, stability of motion.
В машине МВР-8 (РП-50) приводной дебалансный механизм закреплен на решетном стане, который прикреплен к раме машине с помощью канатных подвесок. Механизм обладает простой конструкции, но требует оптимального расположения подвесок и приводного дебалансного устройства относительно главных осей инерции решетного стана.
Цель работы. Изучить возможность обеспечения устойчивости движения решетного стана на стадии проектирования и модернизации решетного очистителя МВР-8 (РП-50).
Методика и результаты исследования. Решетный очиститель состоит из рамы, двухярусного решетного стана с шариковой очисткой решет (рис. 1). Решетный стан подвешен к раме с помощью канатных подвесок и получает движение от электродвигателя, ременной передачи и дебалансного механизма с вертикальной осью вращения. Дебаланс обеспечивает круговые колебания решетных станов в горизонтальной плоскости.
На отдельных режимах движение решетного стана становится неустойчивым, что приводит к нарушению технологического процесса и снижению надежности машины. Это послужило основой для проведения настоящих исследований, которые проводились по заданию ОАО «Головного специализированного конструкторского бюро «Зерноочистка».
На решетный стан действует центробежная сила дебаланса Fц, сила тяжести G и упругие восстанавливающие силы подвесок (рис. 1). Для анализа движения системы приняты следующие допущения: силами сопротивления движения можно пренебречь, центр масс решетного стана находится на одинаковом расстоянии от подвесок (a=b), система имеет две степени свободы, положение которой определяют углы поворота подвесок φ1 и φ2.
Углы поворота подвесок определены на основе решения дифференциальных уравнений

где G – вес решетного стана;
С – коэффициент изгибной жесткости одной подвески, которая шарнирно прикреплена одним концом к раме, а другим – к решетному стану:

E – модуль упругости канатной подвески, Е=600 МПа [1];
I – осевой момент инерции круглого сечения подвески:

d – диаметр каната подвески, d=9,9 мм;
l – длина подвески, l=0,55 м;
Fц – центробежная сила дебалансного устройства:
![]()
m∂ - масса дебаланса, m∂=30 кг;
ρ – расстояние о центра масс дебаланса до оси вращения, ρ=0,3 м;
h – расстояние между центрами масс решетного стана и дебаланса, h=0,355 м;
ω – круговая частота возбуждения дебаланса, ω=38,31 рад/с.
Действие момента Fц·h заменено моментом пары сил. В этом случае усилия, действующие на подвески

где Li – расстояние между подвесками по длине решетного стана, L1=2,17 м, по ширине L2=1,6 м.
При расстоянии L1 усилия, действующие на одну подвеску –F1’=F2’=|540| Н, а при расстоянии L2 –F1’’=F2’’=|732,68| Н.
Если направление силы Fi совпадает с направлением действия силы тяжести решетного стана G, то знак в уравнении принимается «плюс», если не совпадает – «минус». После преобразований уравнений (1) приведено к виду

где ωоi – частота собственных колебаний масс mi, при a=b:

Решение уравнения (6) находится из условий:
![]()
Подстановка (8) в (6) позволила определить амплитуды колебания углов поворота подвесок в точках О1 и О2

Числовые значения этих амплитуд: А1=-0,0433 рад, А2=0,00845 рад, которым соответствуют линейные амплитуды колебаний массы m1 Б1=А1·l=23,83 мм и массы Б2=А2·l=4,65 мм. Полученные данные свидетельствуют о неустойчивости движения масс m1 и m2, обусловленные непостоянством момента в выражении (9).
Устойчивость движения системы проверены по диаграмме Айнса – Стретта [2] по параметрам


где Fk – критическая сила для подвески, при которой происходит потеря устойчивости:
![]()
Если точка с координатами «a» и «q» находится в заштрихованной области на диаграмме Айнса – Стретта [2], то система устойчива, если в незаштрихованной – неустойчивая [2].
Применительно к решетному очистителю МВР-8 (РП-50) a=-0,0469, q=0,0209. Точка с такими координатами расположена в незаштрихованной области, которая соответствует неустойчивости системы.
Движение решетного стана изучалось экспериментально на специально изготовленном стенде. На рисунке 2 приведена фотография фрагмента видеосъемки движения решетного стана 1, подвешенного к раме шарнирно с помощью канатных подвесок 2, 3, 4, 5. Решетный стан получал движение от электродвигателя постоянного тока. На вал электродвигателя установлен дебаланс 6, частота вращения которого регулировалась за счет изменения сопротивления в электрической цепи.
На рисунке 2 видно, что подвеска 2 имеет наибольший прогиб в средней части в сторону подачи зерна. Подвеска 3 изогнута в средней части в сторону длины решета. Подвеска 4 прогибается как подвеска 2. Подвеска 5 не имеет прогиба.
При изменении положения дебалансов картина деформации подвесок изменяется. Характер изменения трудно предусмотреть заранее, т.к. оно происходит в различных направлениях. Все устойчивые системы похожи одна на другую, неустойчивые системы проявляются по-разному [2].
Выводы. Потеря устойчивости движения решетного очистителя МВР-8 (РП-50) происходит потому, что точка пересечения главных осей инерции решетного стана не совпадает с точкой пересечения диагоналей подвесок в статическом положении и осью вращения дебаланса.
Конструкция крепления подвесок к решетному стану и к раме машины не ограничивает перемещение решетного стана в разных плоскостях. Низкая изгибная жесткость подвесок способствует такому движению рабочего органа.
Накопленный опыт по модернизации решетных машин, например, при замене прямолинейных колебаний решетных станов зерноочистительной машины ОВС-25 на круговые колебания, позволяет рассчитывать на положительный исход модернизации конструкции решетного очистителя МВР-8 (РП-50) [3].
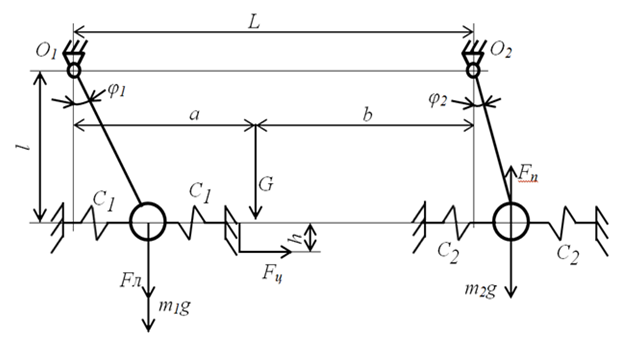
Рисунок 1 - Расчетная схема движения решетного стана, масса которого сосредоточены в точка 1 и 2
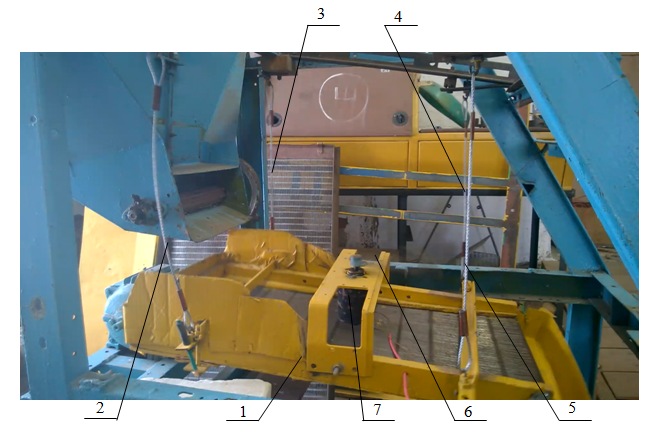
Рисунок 2 – Фрагмент видеосъемки движения решетного стана экспериментальной установки
1 – решетный стан; 2 – передняя левая подвеска; 3 – задняя левая подвеска; 4 – задняя правая подвеска; 5 – передняя правая подвеска; 6 дебаланс; 7 - электродвигатель
Литература
- Вайсон А.А. Подъемно-транспортные машины: 4-е изд., перераб. и доп. – М.: Машиностроение, 1989. – 536 с.
- Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем: Современные концепции, ошибки и парадоксы. – 3-е изд. Перераб. – М.: Наука. Главная редакция физико-математической литературы, 1979, 384 с.
- Лапшин И.П., Косилов Н.И. Расчет и конструирование зерноочистительных машин. – Курган: ГИПП «Зауралье», 2002. – 186 с.
References
- Vaison А.А. Lifting-transport machines: 4 edition, revised and augmented. – М.: Mashinostroenie, 1989. – 536 p.
- Panovko Ya.G., Gubanova I.I. Stability and oscillations of elastic systems: Modern concepts, paradoxes and errors. – 3 edition, revised. – М.: The main edition of physico-mathematical literature, 1979, 384 p.
- Lapshin I.P., Kosilov N.I. Calculation and design of grain cleaning machines. – Kurgan: GIPP «Zauralie», 2002. – 186 p.