Development of a digital operator module for a training platform
Development of a digital operator module for a training platform
Abstract
Within the work, the development of a virtual training environment module is examined, allowing the simulation of control centre operator actions in various situations when performing routine work processes and procedures for immediate response to emergency events. This unit is based on a mathematical model and the Monte Carlo method, which work together to generate and describe the sequences of signals sent to the system. An important part of the development is taking into account the theoretical knowledge of the operator responding to events and the probability of the technical device that sends the alarm signal to the employee. As a result of testing the module, outcomes were generated representing the probabilities of a digital operator performing all actions.
1. Введение
Ввиду актуальности вопросов обеспечения безопасности особо опасных производств, существует необходимость в создании инструментов, позволяющих проводить подготовку специалистов и оценивать их действия в обычных и особенно в чрезвычайных ситуациях
, , , . Подготовка специалистов вышеупомянутых объектов связана с потенциальным риском, поэтому предлагается использовать тренировочную платформу . Преимуществом применения платформы является трансформация обучающего объекта, тем самым позволяя проводить подготовку персонала на различном оборудовании и ситуациях. Такой подход дает возможность обеспечить максимальную вариативность тренировочных ситуаций, однако усложняет структуру платформ в связи с тем, что появляется необходимость учитывать различия в действиях персонала на разных объектах. Решением проблемы является создание цифрового портрета оператора, позволяющего моделировать действия человека или же оценивать правильность путем соотнесения получаемого результата моделирования к тестируемому специалисту. Поэтому под цифровым портретом будем понимать набор индивидуальных характеристик оператора, полученных благодаря различным методам тестирования реакции и позволяющий сделать вывод о профессиональных навыках сотрудника. В платформе за это будет отвечать отдельный модуль, представим на рисунке 1 взаимодействия данного модуля с платформой.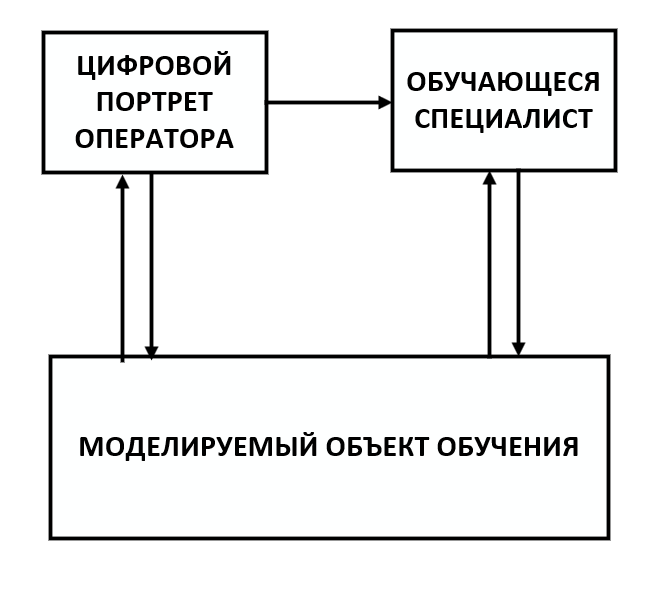
Рисунок 1 - Структура обучающей платформы
2. Основанная часть
Входными данными моделирования являются данные об объекте, к которым относятся данные о системе безопасности объекта, о нарушителе и информация, поступающая с технических средств защиты.
Данные о системе безопасности объекта включают в себя большой комплекс элементов, а именно:
- сведения о вооруженной охране;
- сведения об организационных мерах: установленный режим допуска и доступа, наличие охраны, организация пропускного и внутриобъектового режима и др.;
- сведения об инженерно-технических средствах защиты
.Данные о нарушителе представляют собой совокупность информации о численном составе группы, их физической подготовке, оснащенности (наличие вооружения, взрывчатых веществ, транспортных средств и другого специального оборудования), а также об их тактике действий.
Данными, поступающими с технических средств защиты, в виде сигналов, полученные оператором от:
- периметровых средств обнаружения;
- системы тревожно-вызывной сигнализации;
- системы оптико-электронного наблюдения;
- системы оперативной связи и оповещения.
Срабатывания вышеперечисленных компонентов в дальнейшем помогает сотруднику оценить сложившуюся обстановку с помощью видеонаблюдения, проанализировать ситуацию и ввести необходимые команды управления на пульте управления
. Представим упрощенную информационную схему модели модуля цифрового оператора пункта управления, представленного на рисунке 2. На ней изобразим входные и выходные параметры моделирования.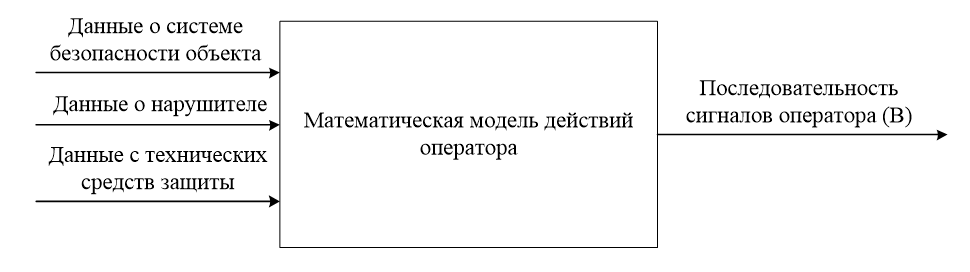
Рисунок 2 - Информационная схема математической модели цифрового портрета
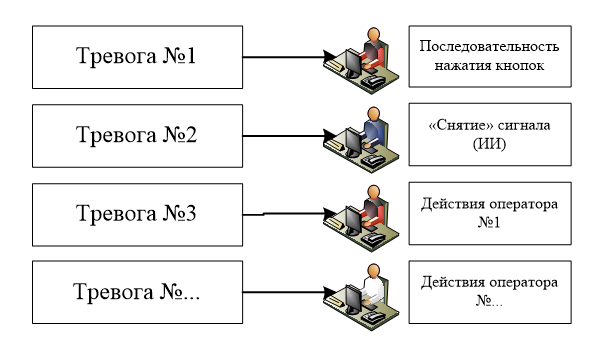
Рисунок 3 - Вид выходного сигнала
Для данного цифрового портрета существует возможность использования двух сценариев оценивания работы оператора:
1. Совместная согласованная работа оператора №1 и оператора №2;
2. Воспрепятствование работе оператора №1 оператором №2.
В первом варианте оба оператора являются хорошо подготовленными специалистами с высоким показателем, которые последовательно и своевременно обрабатывают поступающие сигналы тревоги. То есть, реализуется адекватная работа сотрудников в решении вопросов безопасности в чрезвычайной ситуации. Во втором варианте существует множество разнообразий по воспрепятствованию вторым оператором адекватной работе всей системы, например:
- «игнорирование» сигнала тревоги вторым оператором;
- низкий показатель усвоенных теоретических сведений вторым оператором;
- умышленное искажение информации, полученной с сигнала тревоги вторым оператором.
Использование двух таких подходов при оценке действий сотрудника позволит получить наиболее достоверные результаты, поскольку они будут учитывать не только рассмотрение «стандартных» ситуаций, но и когда второй оператор может быть в сговоре с нарушителями или достаточно некомпетентен для принятия правильных действий.
Поскольку важной фигурой в обеспечении безопасного функционирования технологических процессов на объекте является специалист автоматизированной системы, то существует необходимость оценивания его последовательности действий.
Ранее в работе
предлагалось использовать математическую модель совместно с искусственным интеллектом для нахождения последовательности сигналов оператора. Но при ее реализации встала проблема в корректной связи входных параметров и получении цепочки последовательных сигналов. Поэтому сейчас предлагается решить данную проблему с помощью использования математической модели, включающей в себя нахождение вероятности безошибочных действий сотрудника и определение последовательности сигналов оператора с помощью метода Монте-Карло.Тогда вероятность безошибочных действий находится как:
где
В модели вводятся допущения, что
Рассмотрим
- время, затраченное на оценку возникшей ситуации;
- время, затраченное на принятие решения;
- время, затраченное на ввод команд управления
.Совокупность этих факторов будет вносить существенный вклад в нахождении вероятности своевременных действий.
При условии, что время выполняемых действий оператором будет являться случайной величиной с нормальной плотностью распределения времени ее выполнения, то вероятность своевременных действий
где
Для нахождения последовательности сигналов, которые выполнил сотрудник при принятии решений на возникающие несанкционированные деяния злоумышленников помимо
На первых этапах алгоритма оператору всегда необходимо незамедлительно отреагировать на сигнал, поступивший на пульт управления. Затем с помощью системы видеонаблюдения осуществить визуальную оценку обстановки на участке тревоги с целью подтверждения несанкционированного действия нарушителя, поскольку существует вероятность ложного срабатывания средств охранной сигнализации.
При подтверждении произвести анализ ситуации в соответствии с выявленной численностью нарушителей, их физической подготовки и оснащенности для определения потенциальной цели вторжения. На основании собственного анализа передать полученную информацию коменданту для своевременной отправки группы реагирования на место происшествия, сообщить начальнику службы безопасности о предпринятых мерах и продолжить наблюдение за охраняемым объектом.
В случае повторного срабатывания тревожного сигнала оператору необходимо повторить все изложенные действия с самого начала.
Для реализации цифрового портрета рассмотрим структурную схему математической модели, представленной на рисунке 4. Стоит отметить, что главное ее отличие от предыдущей состоит в том, что она содержит также зависимости, с помощью которых можно произвести последовательное нахождение всех переменных необходимых для моделирования.
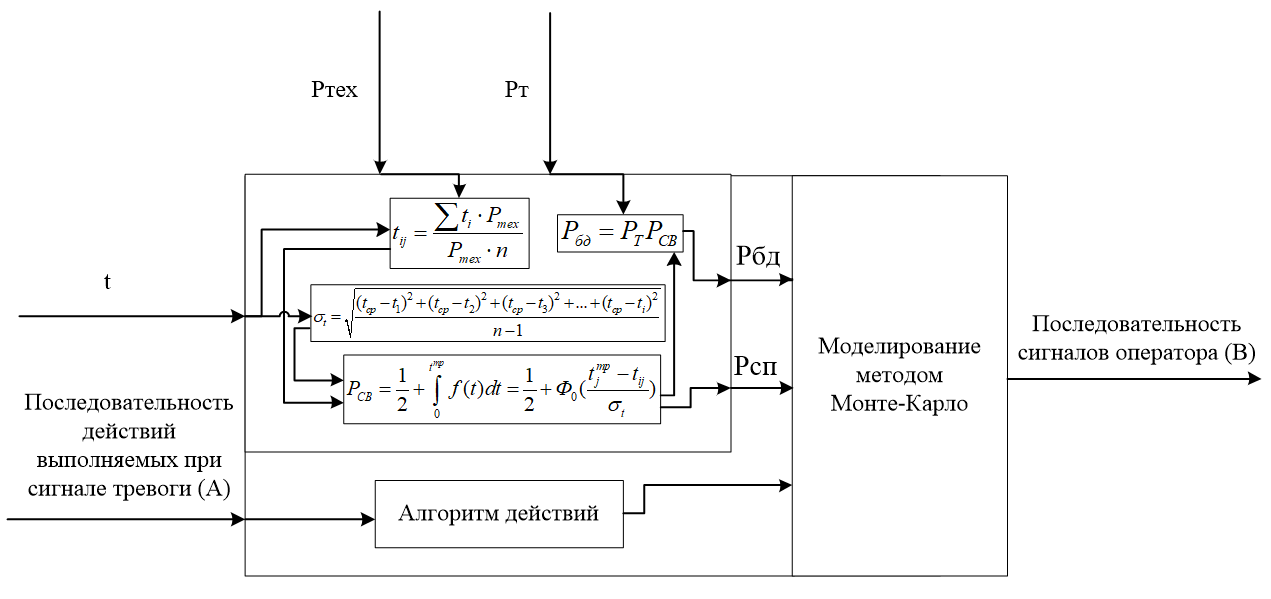
Рисунок 4 - Структурная схема математической модели
На ней изображены входные и выходные данные моделирования, а также некоторые константы.
Вертикальными стрелками показаны переменные-константы, изменяющиеся во времени и используемые для нахождения
Входными данными для нахождения последовательности сигналов являются действия оператора при возникновении сигнала тревоги, которые он должен выполнять согласно существующему алгоритму и рассчитанное значение
Моделирование сигналов будет происходить за счет реализации метода Монте-Карло. Его выбор обусловлен возможностью имитации событий с заданной вероятностью и получении выходных данных в виде цепочки результатов true-false. Принцип расчета будет базироваться на моделировании каждого действия в блок-схеме алгоритма согласно рассчитанной вероятности безошибочных действий. Для понимания смоделируем ситуации, где злоумышленник при преодолении территории объекта инициирует 3 последовательных сигнала тревоги. С помощью вышеупомянутой математической модели находим,
Весь блок действий для 1–2 сигнала будет выполняться с максимальной вероятностью
– вероятность срабатывания технических средств в 0,9;
– вероятность успешного освоения оператором теоретических сведений в 0,8;
– промежутки времени: 50 секунд, 250 секунд, 500 секунд и 720 секунд.
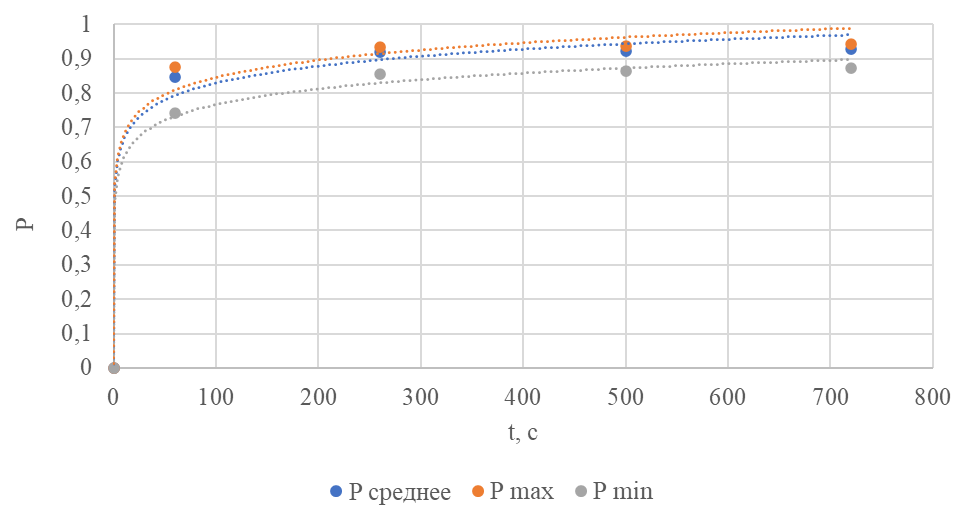
Рисунок 5 - Результаты моделирования
3. Заключение
Разработана концепция модели цифрового портрета, представляющая собой набор индивидуальных характеристик сотрудника и позволяющая определить слабые стороны оцениваемого человека благодаря анализу предпринятых действий. Для ее создания предложена математическая модель, учитывающая данные о системе безопасности объекта, данные о нарушителе и данные поступающие с технических средств защиты. Также в качестве дальнейшего возможного развития цифрового портрета предложена возможность внедрения искусственного интеллекта
, который позволит моделировать различные нештатные ситуации с распределением сигналов тревоги между сотрудниками.Для нахождения последовательности сигналов оператора рассмотрена математическая модель с использованием метода Монте-Карло, позволяющая получить выходные данные в виде цепочки результатов true-false. Такое представление результатов позволяет произвести детальный анализ действий оператора и сделать вывод об его профессиональной подготовке. Анализ полученных результатов показывает, что оптимальным значением вероятности выполнения всех полных действий является среднее распределение между максимальной и минимальной вероятностью выполнения и именно его в дальнейшем планируется использовать в модуле. В результате моделирования выявлено, что вероятность выполнения правильности всех действий цифровым оператором варьируется от 0,7 до 0,87.