Automatization of the process of forest fire detection using remote sensing data from Arktika-M
Automatization of the process of forest fire detection using remote sensing data from Arktika-M
Abstract
The article examines the process of automating the detection of forest fires using remote sensing data from the Arktika-M project. An analysis of the effectiveness of satellite monitoring systems and data processing algorithms for fire detection is presented. Traditional surveillance methods and modern technologies such as artificial intelligence and machine learning are analysed. The advantages of using earth remote sensing data for monitoring large areas and early fire detection are discussed.
A convolutional neural network model was developed to solve the problem of forest fire detection from remotely sensed data. For training and testing of the model, the data on fires from the Arktika-M satellite for 2023 were used. The model training accuracy on the test sample is 99.4%. The model was also tested on data for 2024. The results of approbation showed that the accuracy of the predictive model is 98%, which is sufficient for application in the tasks of forest fire detection using remote sensing data from the Arktika-M satellite.
1. Введение
Лесные пожары являются критической проблемой во многих частях мира, представляя собой значительную угрозу не только для природных экосистем, но и для жизни и имущества людей. К тому же они вносят значительный вклад в изменение климата из-за выбросов парниковых газов. Таким образом, задача предупреждения, локализации и ликвидации лесных пожаров является крайне важной.
Традиционные методы борьбы с пожарами, такие как наземные патрули или наблюдение из воздуха, часто ограничены своими возможностями в плане скорости реагирования и покрытия территории. В связи с этим методы дистанционного зондирования Земли (ДЗЗ) становятся неоценимыми инструментами для своевременного выявления и контроля за развитием лесных пожаров.
ДЗЗ представляет собой мощный инструмент для мониторинга и изучения поверхности планеты с использованием спутниковых систем. Используя спутниковые данные, ученые и специалисты могут мониторить большие территории, выявлять начавшиеся пожары и прогнозировать их распространение.
Эффективное обнаружение лесных пожаров на ранних стадиях позволяет своевременно принимать меры по их тушению, предотвращая развитие катастрофических сценариев и минимизируя потери. Однако реализация таких систем требует не только высокотехнологичного оборудования, но и сложных алгоритмов обработки данных, учитывающих множество факторов: от атмосферных условий до особенностей ландшафта.
Современные технологии, такие как искусственный интеллект и машинное обучение, значительно повышают эффективность анализа данных ДЗЗ, обеспечивая автоматическое обнаружение и классификацию пожаров. Это не только ускоряет процесс обнаружения, но и сокращает вероятность человеческой ошибки.
В данной статье будет рассмотрен подход к обнаружению лесных пожаров с использованием данных ДЗЗ и нейросетевых технологий.
2. Литературный обзор
Главными факторами, определяющими эффективность борьбы с природными пожарами, являются оперативность обнаружения и своевременность подавления их очагов, особенно на ранних стадиях. Одним из перспективных подходов к решению этой проблемы является использование спутниковых систем мониторинга, оснащенных широким спектром современной аппаратуры ДЗЗ . Использование спутниковых данных предоставляет возможность мониторинга обширных территорий в реальном времени, что способствует быстрому выявлению и локализации очагов пожара.
Благодаря широкой распространенности и доступности данных со спутников дистанционного зондирования Земли многочисленными группами ученых выполняются исследования по обнаружению лесных пожаров по спутниковым изображениям.
Обнаружение пожаров по спутниковым снимкам является сложной задачей, требующей применения различных методов обработки изображений и анализа данных. Существуют несколько подходов к решению этой задачи, которые можно разделить на традиционные методы и современные методы, основанные на машинном обучении и нейронных сетях.
К традиционным методам относятся методы анализа спектральных характеристик и пороговые методы.
Методы анализа спектральных характеристик. Спутниковые снимки часто содержат информацию в различных спектральных диапазонах, таких как видимый свет, инфракрасное излучение и другие. Пожары можно обнаружить, анализируя аномалии в спектральных характеристиках изображений. Например, инфракрасное излучение может указывать на высокие температуры, характерные для горящих участков .
Датчики изображения на солнечно-синхронных спутниках западного производства представлены следующими мультиспектральными датчиками изображения: AVHRR (Advanced Very-High-Resolution Radiometer) , MODIS (Moderate Resolution Imaging Spectroradiometer) и VIIRS (Visible Infrared Imaging Radiometer Suite) .
Радиометр AVHRR представляет собой многоцелевой прибор для получения изображений, измеряющих отражательную способность Земли и используемых для глобального мониторинга облачного покрова, температуры поверхности моря, характеристик льда, снега и растительного покрова. Приборы AVHRR применяются на семействе полярно-орбитальных спутников Национального управления океанических и атмосферных исследований NOAA (National Oceanic and Atmospheric Administration) полярно-орбитальном оперативном спутнике окружающей среды – POES (Polar-orbiting Operational Environmental Satellite) и европейских метеорологических оперативных спутников MetOp (Meteorological Operational). Прибор обеспечивает шесть каналов: три в видимой/ближней инфракрасной области и три тепловых инфракрасных канала с пространственным разрешением 1 км.
Спектрорадиометр MODIS применяется на спутниках EO Terra и Aqua Национального управления по аэронавтике и исследованию космического пространства (NASA), время повторного посещения которого составляет 1–2 дня, собирает данные в 36 спектральных диапазонах с длинами волн от 0,4 до 14,4 мкм на различных пространственных разрешениях (2 полосы на 250 м, 5 полос на 500 м и 29 полос на 1 км).
На смену MODIS пришел прибор VIIRS (Visible Infrared Imaging Radiometer Suite), используемый на метеорологических спутниках Suomi NPP (Suomi National Polar-orbiting Partnership) и NOAA-20. Прибор обеспечивает 22 различных спектральных диапазона, из них 16 диапазонов среднего разрешения (M-диапазоны, 750 м), 5 диапазонов разрешения изображения (I-диапазоны, 375 м) и 1-дневной/ночной панхроматический диапазон (750 м).
Эти датчики широко применяются для обнаружения лесных пожаров практически в реальном времени. Например, в Sayad и др. объединили большие данные, данные дистанционного зондирования и алгоритмы интеллектуального анализа данных (искусственная нейронная сеть и метод опорных векторов) для обработки больших данных, собранных из изображений MODIS, и извлечения из них информации для прогнозирования возникновения лесных пожаров. В частности, они использовали предварительно обработанные данные MODIS для создания набора данных, основанного на трех параметрах, связанных с состоянием сельскохозяйственных культур: а именно, нормализованном разностном растительном индексе (NDVI), температуре поверхности земли и термических аномалиях. Для прогнозирования лесных пожаров они использовали два разных подхода к контролируемой классификации, основанных на нейронных сетях и методе опорных векторов, добившись хорошей точности прогнозирования в 98,32% и 97,48% соответственно. Результаты оценивались с использованием нескольких стратегий проверки (например, показателей классификации, перекрестной проверки и регуляризации) и сравнения с другими моделями прогнозирования лесных пожаров.
В нескольких статьях рассматривается проблема обнаружения дыма по данным MODIS, которая является очень сложной задачей, учитывая её сильное сходство с облаками, дымкой и другими подобными явлениями. Shukla и др. предложили алгоритм автоматического обнаружения дыма с использованием данных MODIS, который был основан на методе многополосной пороговой обработки для идентификации дымовых шлейфов и облаков. Результаты показали, что алгоритм смог изолировать пиксели дыма в присутствии других типов сцен, таких как облака, хотя он лучше справлялся с определением свежего густого дыма по сравнению с сильно рассеянным дымом. Аналогичным образом, Li и др. предложили подход к автоматическому отделению шлейфов дыма от облаков и фона путем анализа данных MODIS. В частности, предыдущий подход, предложенный Li для датчика AVHRR (Advanced Very-High-Resolution Radiometer) был улучшен на основе спектрального анализа дыма, облаков и подстилающей поверхности с использованием данных MODIS. В частности, использовался многопороговый метод для извлечения наборов обучающих выборок для обучения нейронной сети обратного распространения ошибки для трех классов: (дым, облако и подстилающая поверхность). Результаты с использованием данных MODIS по нескольким лесным пожарам, произошедшим в разных местах и в разные даты, были удовлетворительными. Преимущества включают в себя способность алгоритма обнаруживать шлейфы дыма в разные сезоны с использованием наборов сезонных обучающих данных, а также то, что он обеспечивает количественную и непрерывную выдачу дыма и других объектов.
Пороговые методы. Одними из самых простых и универсальных алгоритмов детектирования пожаров являются пороговые методы. Данные методы базируются на анализе температур яркости в отдельных спектральных каналах. Ключевым признаком поискового явления есть локальное повышение температуры в месте возгорания.
В пороговых алгоритмах устанавливают один или несколько порогов для определенного канала или комбинации различных спектральных каналов, анализируют каждый пиксель один за другим и классифицируют пиксели, которые соответствуют порогу, как очаги пожара; в противном случае они классифицируются как непожарные точки.
Значение порога в каждом из каналов определяется из условия его превышения пикселями из области очага пожара и не превышения пикселями из смежной области .
Одним из пороговых алгоритмов является алгоритм MOD14 . Алгоритм MOD14 основан на сравнении температур каждого пикселя в двух инфракрасных спектральных каналах – 4 мкм и 11 мкм. Использование этих каналов обусловлено существованием окон прозрачности атмосферы. Алгоритм MOD14 подразумевает, что фоновая температура понижается с удалением от перегретой точки. В первую очередь учитывается интенсивность средневолнового инфракрасного излучения – чем выше радиояркостная температура в канале 4 мкм, тем больше вероятность пожара. В дневное время суток значение температуры территории, соответствующей одному пикселю, должно быть выше порога в 312 К, а в ночное время – 305 К. Во вторую очередь учитывается разность температур в каналах 4 мкм и 11 мкм – чем она выше, тем больше вероятность пожара. В этом случае значение интенсивности сигнала в канале 4 мкм должно сильно отличаться от окружения.
Пороговый алгоритм для обработки данных с прибора MODIS . Алгоритм детектирования пожаров в автоматическом режиме основан на значительной разнице температур земной поверхности (обычно не выше 10 – 25 C) и очага пожара (300 – 900 C). Почти 100-кратное различие в тепловом излучении объектов фиксируется на снимке, а информация, поступающая с других спектральных каналов, помогает отделить облака. Съемка тепловой аппаратурой спектрорадиометра MODIS с пространственным разрешением 1 км дает возможность выявить очаг пожара площадью от 1 га или подземный пожар площадью от 9 га.
Пороговый алгоритм для обработки данных с прибора AVHRR. Для анализа данных с прибора AVHRR применяются пороговые алгоритмы выделения очагов пожаров, такие как алгоритм Кауфмана , алгоритм Франса , алгоритм Кэннеди . Если элемент разрешения удовлетворяет условиям алгоритма, то он относится к классу пожаров; если же не удовлетворяет хотя бы одному из этих условий, то – к фону.
На сегодняшний день в центре приема и анализа авиационно-космической информации МЧС России за основу принят алгоритм Кауфмана с «плавающими» порогами» . Как указывалось ранее, на этапе предварительной обработки информации с аппаратуры AVHRR определяются явные очаги природных пожаров по наличию дымовых шлейфов.
После калибровки изображений определяются характеристики выявленных очагов и прилегающего к ним фона, на основе которых и выбираются соответствующие пороги. После анализа аналогичных характеристик подстилающей поверхности в пределах снимка совместно с характеристиками очагов пожаров определяются «плавающие» пороги.
Для данного алгоритма возможно появление ложных тревог, вызванных перегретым песком и различными техногенными образованиями. Поэтому сомнительные точки, находящиеся слишком близко к облакам, вблизи рек, морей и т.д., необходимо подвергнуть дополнительной проверке.
Дополнительная проверка заключается в анализе отражательной способности интересующих пикселей в первом и втором каналах аппаратуры AVHRR. Если значение в первом канале больше, чем значение во втором канале (A1 > A2), то данную точку в подавляющем большинстве случаев можно однозначно отнести к ложной тревоге. Но возможны случаи, когда возникают сомнения в правильности такого решения (например, отсутствие облачности или песка). В этом случае данная точка классифицируется как возможный очаг пожара, если нет какой-либо дополнительной информации о рассматриваемом районе. Если же значения в первом и втором каналах превышают 10-16% (в зависимости от условий наблюдения), то данная точка также классифицируется как ложная тревога. Во всех остальных случаях принимается гипотеза о наличии тепловой аномалии в рассматриваемых точках.
Если число ложных тревог достаточно велико, то можно несколько завысить порог по третьему и/или по четвертому каналу. Таким способом, не удается полностью избавиться от ложных тревог и все равно приходится проверять большинство предполагаемых очагов.
Алгоритм детектирования термальных точек . Алгоритм обработки состоит из двух этапов. Первый этап предполагает выделение зоны потенциальных очагов для уменьшения количества входной информации на втором этапе. Второй этап заключается в обработке, основанной на методе потенциальных функций dx. Входными параметрами служат физические величины в каналах 1-5 прибора AVHRR, а также контраст в районе потенциальных очагов в каналах 2 – 4. Для детектирования очага пожара должно выполняться условие dx > 0.
Традиционные пороговые методы широко используются в задачах активного обнаружения пожара. Однако они имеют ряд недостатков. Пороговое значение определяется в соответствии со статистическими данными окружающих районов, где пожары при различных формах рельефа, климате и сезонах имеют различные характеристики. Это означает, что пороговое значение динамически изменяется в зависимости от исследуемой области и данных. Кроме того, на пороговые методы легко влияют облака, густой дым. Таким образом, когда он используется для оценки больших площадей, пороговый алгоритм подвержен ложным срабатываниям и пропускам.
3. Подходы на основе технологий машинного и глубокого обучения
Задачу обнаружения лесных пожаров на данных ДЗЗ можно рассматривать как задачу бинарной классификации. Постановка задачи классификации выглядит следующим образом. Пусть имеется множество объектов размерности
, каждый из которых характеризуется вектором признаков размерности
. Для каждого исследуемого объекта известна его принадлежность к тому или иному классу
. Задача классификации состоит в следующем. Требуется сформулировать правило (алгоритм)
, которое позволит по заданным значениям признаков назначить ранее неизвестному объекту тот или иной класс.
Применительно к проблеме обнаружения лесных пожаров задача классификации сводится к определению состояния пикселей изображений. На основе выборки исходных данных требуется построить алгоритм, способный для заданных значений выдать ответ о его принадлежности к тому или иному состоянию c достаточно высокой точностью.
Точность решения задачи зависит от объема и качества исходных данных, выбранных методов классификации, критериев качества прогнозирования, значимости контролируемых параметров.
Для решения задачи классификации существуют различные подходы: логистическая регрессия, наивный байесовский классификатор, машина опорных векторов, деревья решений и ансамблевые методы, нейронные сети.
Одно из ключевых направлений решения задачи обнаружения пожаров является применение методов компьютерного зрения и глубокого обучения. Методы глубокого обучения также недавно были применены для обнаружения огня и дыма по мультиспектральным спутниковым изображениям. Ba и др. представили новый крупномасштабный набор спутниковых изображений на основе данных MODIS, а именно USTC_SmokeRS, состоящий из 6225 спутниковых изображений шести классов (облака, пыль, дымка, земля, море и дым) и охватывающий различные области/регионы по всему миру. Используя этот набор данных, авторы оценили несколько современных моделей классификации изображений на основе глубокого обучения для обнаружения дыма и предложили SmokeNet, новую модель CNN (Convolutional Neural Network), в которую включены пространственное и канальное внимание для улучшения представления функций классификации сцен. Кроме того, Priya и др. использовали набор данных из 534 спутниковых изображений RGB из разных источников, включая изображения MODIS с платформы NASA Worldview и Google. Для классификации пожарных и не пожарных изображений использовался эффективный подход с использованием инфраструктуры CNN Inception-v3 и трансферного обучения. Затем районы пожаров были выделены на основе пороговых значений и локальных бинарных шаблонов.
4. Описание исходных данных
В рамках данной статьи для разработки алгоритма мониторинга лесных пожаров будут использованы данные, получаемые с российской спутниковой высокоэллиптической группировки Арктика-М. Спутниковая система «Арктика-М» представляет собой серию метеорологических спутников, разработанных для мониторинга арктических регионов и обеспечения данных для прогнозирования погоды, климата и экологического состояния.
Спутники «Арктика-М» оснащены высокотехнологичными приборами для наблюдения за Землей, которые включают в себя:
1. Мультиспектральные сканеры, которые позволяют получать изображения в различных спектральных диапазонах, что помогает в различении разных типов поверхности и выявлении аномалий, таких как пожары.
2. Гиперспектральные камеры, которые обеспечивают детализированные данные, которые позволяют анализировать химический состав поверхности и атмосферы, что важно для точного обнаружения очагов возгорания.
3. Инфракрасные датчики, которые позволяют обнаруживать тепловое излучение от пожаров даже через облачный покров и в ночное время.
4. Радиолокационные системы, которые обеспечивают возможность наблюдения поверхности Земли в любых погодных условиях, включая облачность и сильные осадки.
Принцип работы спутников «Арктика-М» основан на использовании высокоэллиптических орбит для обеспечения длительного наблюдения за полярными регионами, современными датчиками для получения точных данных и эффективными системами передачи для быстрой доставки информации на Землю. Эти возможности делают спутники «Арктика-М» незаменимыми инструментами для мониторинга экологической и климатической обстановки в арктических регионах, а также для обнаружения и мониторинга пожаров.
Для разработки алгоритма обнаружения пожаров были получены на спутниковые данные с «Арктика-М» за 2023 год. На полученных вручную сценах были выделены области с пожарами. Эти области были разбиты на изображения размерностью 49 на 49 пикселей. В конечном итоге была получена выборка, содержащая 470 изображений с пожаром и 675 изображений без пожара. На рисунке 1 приведен пример изображений с пожаром и без.

Рисунок 1 - Примеры кадров с пожаром (слева) и без (справа)
5. Описание подхода к решению задачи
На сегодняшний день основным инструментом для обработки изображений и видео являются свёрточные нейронные сети (CNN). Использование свёрточных нейросетей для обнаружения пожаров на спутниковых снимках имеет несколько ключевых преимуществ:
1. Выделение признаков на разных уровнях. CNN способна выделять как низкоуровневые (края, текстуры), так и высокоуровневые (формы, объекты) признаки, что критически важно для точного обнаружения пожаров, которые могут иметь разнообразные формы и размеры.
2. Обработка большого объема данных. Спутниковые снимки обычно имеют высокое разрешение и большой объем данных. Слои подвыборки и свертки в CNN эффективно уменьшают размерность данных, сохраняя при этом важную информацию.
3. Распознавание в различных условиях. Пожары могут происходить в разных условиях освещения, погоды и местности. CNN, благодаря своей способности к обобщению, может быть обучена распознавать пожары в различных сценариях, обеспечивая надежность и точность.
4. Адаптация и масштабируемость. CNN можно легко адаптировать и масштабировать для обработки данных с различных спутников и датчиков, что позволяет использовать эту технологию в глобальном масштабе.
Эффективность решения задачи классификации изображений с использованием искусственных нейронных сетей определяется их гиперпараметрами. Для настройки нейронной сети необходимо выполнить подбор гиперпараметров. Процесс подбора гиперпараметров – это процесс выбора параметров модели машинного обучения, которые настроены на ранних этапах моделирования, чтобы оптимизировать её производительность и обеспечить точность результата на заданных данных. Гиперпараметры не требуют изменения во время обучения модели, и могут значительно влиять на производительность модели.
Процесс подбора гиперпараметров состоит из следующих этапов.
1. Определение набора гиперпараметров, которые настраиваются. Например, количество слоев, количество нейронов в каждом слое, скорость обучения, размер мини-пакета и количество эпох.
2. Определение диапазонов гиперпараметров. Например, скорость обучения может быть в диапазоне от 0,001 до 1.
3. Выбор метрики, по которой будет оцениваться производительность модели. Например, это может быть точность, F1-мера или среднеквадратическая ошибка.
4. Выбор метода оптимизации, который будет использоваться при настройке гиперпараметров. Например, это может быть случайный поиск или перебор по сетке.
5. Запуск процесса подбора гиперпараметров, используя выбранный метод оптимизации и выбранные диапазоны значений для каждого гиперпараметра. Обычно этот процесс включает обучение модели на множестве параметров и оценку её производительности на валидационном наборе данных.
6. После завершения процесса поиска гиперпараметров выбирается оптимальный набор гиперпараметров, который дает наилучшую производительность модели на валидационном наборе данных.
Для подбора гиперпараметров на данный момент существуют различные методы, такие как поиск по сетке, случайный поиск, Байесовская оптимизация, генетический алгоритм и др. В рамках данной работы был выбран случайный поиск, т.к. он по сравнению с другими алгоритмами в большинстве случаев дает такие же результаты, но при меньшем времени.
Настраиваемые гиперпараметры и соответствующие диапазоны для модели свёрточной нейронной сети приведены ниже:
● количество Conv2D и MaxPooling2D слоев: [1-3];
● количество фильтров: [16, 32, 64, 128];
● размер ядра Conv2D слоя: [3-6];
● размер окна MaxPooling2D слоя: [2-3];
● количество полносвязных слоев: [1-3];
● количество нейронов на полносвязном слое: [64, 128, 256, 512];
● функция активации в полносвязной части: [relu, tanh, sigmoid];
● оптимизатор [adam, rmsprop, SGD].
В результате работы алгоритма поиска наилучшие показатели метрики точности (99,4%) показала модель со следующей архитектурой
● Conv2D(32, (3, 3), activation='relu')
● MaxPooling2D((2, 2))
● Conv2D(64, (3, 3), activation='relu')
● MaxPooling2D((2, 2))
● Conv2D(128, (3, 3), activation='relu')
● MaxPooling2D((2, 2))
● Conv2D(128, (3, 3), activation='relu')
● MaxPooling2D((2, 2))
● Flatten()
● Dense(512, activation='relu')
● Dense(1, activation='sigmoid')
В качестве алгоритма оптимизации был выбран алгоритм Adam.
6. Анализ и обсуждение результатов
Оценка эффективности модели основана на сравнении результатов прогнозирования с фактами обнаружения пожаров. Для сопоставления прогнозов и реальности используется матрица ошибок – таблица с четырьмя различными комбинациями прогнозируемых и фактических значений (рисунок 2). Матрица ошибок позволяет оценить эффективность прогноза не только в качественном, но и в количественном выражении. Прогнозируемые значения описываются как положительные (P) и отрицательные (N), а фактические – как истинные (T) и ложные (F). В столбцах матрицы отражается прогноз, в строках – реальность.
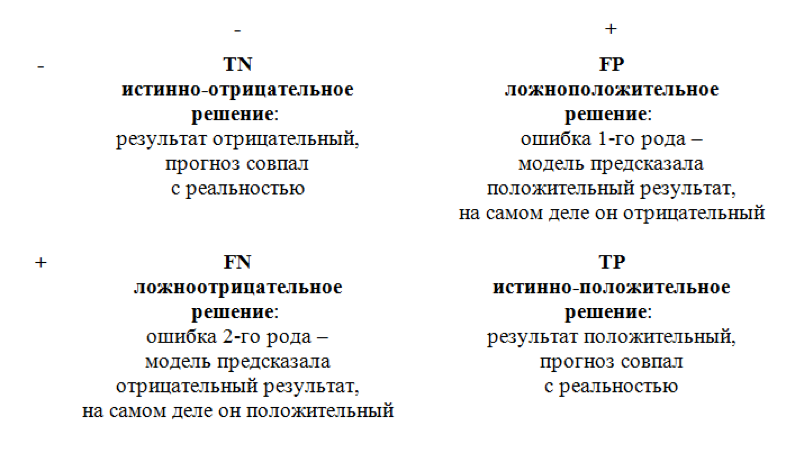
Рисунок 2 - Матрица ошибок
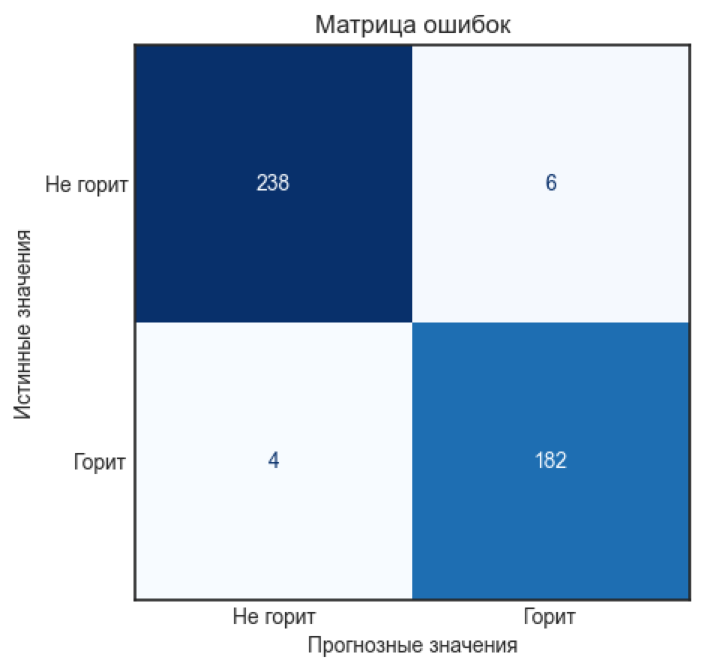
Рисунок 3 - Матрица ошибок
7. Заключение
В работе предложена модель обнаружения лесных пожаров по данным дистанционного зондирования Арктика-М на основе свёрточной нейронной сети. Задача обнаружения пожаров решается как задача бинарной классификации, когда на основе данных со спутника определяется состояние пикселей каждой сцены, принадлежащее одному из двух классов: «горит» или «не горит».
Авторами статьи была выбрана подходящая архитектура нейронной сети, способная обеспечивать высокую точность классификации пожаров. Выбор архитектуры был обусловлен необходимостью точного и надежного распознавания возгораний, что является критически важным для задач мониторинга и оперативного реагирования. В результате тщательной настройки и обучения модели была достигнута высокая точность классификации, составившая 99,4%. Этот показатель свидетельствует о высокой эффективности разработанной модели и её способности точно различать изображения с признаками пожара и без них.
Апробация модели выполнена на реальных данных работы спутника Арктика-М за 2024 год. Результаты апробации показали, что точность прогностической модели 98%, что является достаточным для применения в задачах обнаружения лесных пожаров по данным дистанционного зондирования Арктика-М.
Дальнейшие исследования в рамках данного направления будут связаны с разработкой моделей оценки динамикой развития лесных пожаров. Данная модель будет позволять прогнозировать развитие пожара во времени, что имеет огромное значение для своевременного принятия мер по их локализации и тушению.