ALGORITHM ANALYSIS OF POWER JOINT-BAR MANIPULATOR SPATIAL DRIVE MECHANISM

Бабоченко Н.В.
Кандидат технических наук, доцент,
Волгоградский государственный аграрный университет
АЛГОРИТМ СИЛОВОГО АНАЛИЗА ШАРНИРНО-СТЕРЖНЕВЫХ МАНИПУЛЯТОРОВ С ПРОСТРАНСТВЕННЫМ ПРИВОДНЫМ МЕХАНИЗМОМ
Аннотация
В статье представлен манипулятор с двухзвенной шарнирно- стержневой стрелой и рассмотрен силовой анализ шарнирно-стержневого манипулятора с определением его зоны действия, используя пространственный метод координат, для решения задач направленных на определение силовых характеристик шарнирно-стержневых манипуляторов.
Ключевые слова: манипулятор, шарниры, стержни, гидроцилиндры, статика.
Babochenko N.V.
Сandidat of the technical sciences, assistant professor,
Volgograd State Agricultural University
ALGORITHM ANALYSIS OF POWER JOINT-BAR MANIPULATOR SPATIAL DRIVE MECHANISM
Abstract
The article presents a manipulator with articulated hinge-rod boom and power analysis considered jointed manipulator rod with the definition of its coverage, using spatial coordinates method for solving aimed at determining the characteristics of power-rod pivotally manipulators.
Keywords: manipulator’s, joints, pivotal, hydrocylinds, static’s.
Шарнирно-стержневые манипуляторы относится к семейству погрузочных манипуляторов с пространственным приводным механизмом [1]. Главной особенностью подобных манипуляторов является наличие двух расположенных под углом друг к другу гидроцилиндров, штоки которых посредством особого шарнирного устройства соединены между собой и со стрелой – её коренной секцией. Противоположные концы (корпуса) этих цилиндров крепятся на основании с помощью шарниров с двумя степенями свободы. Указанные звенья образуют особый пространственный приводной механизм, ведущими звеньями которого являются гидроцилиндры. Цилиндры обеспечивают подъём (опускание) стрелы в вертикальной плоскости и её разворот на углы до ± 650 в горизонтальной плоскости.
Грузовая стрела манипулятора может быть шарнирно-сочлененной, в частности трехзвенной, как это предусмотрено в [1, 2]. Для задействования секций (звеньев) стрелы предусматриваются свои гидроцилиндры, которые работают в плоскости стрелы в обычном порядке. Предлагаемый шарнирно-стержневой гидроманипулятор (рис.1; [1,2]) формально включает двухзвенную шарнирно-сочлененную стрелу. В нём имеются: основание 1, два гидроцилиндра 2 и 3 для подъёма (опускания) и поворота коренной секции 4 и стрелы в целом. Штоки гидроцилиндров также соединены в особом шарнирном устройстве 5 со многими степенями свободы. Вторая секция 6 стрелы (рукоять с крюком на конце) приводится в действие двумя параллельно расположенными гидроцилиндрами 7.
В рассматриваемом манипуляторе сформирован целенаправленный силовой поток – звенья стрелы воспринимают усилия растяжения или сжатия. Обе секции стрелы – это пространственные фермы – большинство их узлов несут определенную функцию. В частности, в шарнирном устройстве 5 соединены между собой не только штоки гидроцилиндров 2 и 3, но стержни коренной секции 4 и корпуса гидроцилиндров 7 рукояти. Манипулятор в целом – вместе с гидроцилиндрами – представляет сложную, но функционально обусловленную пространственную ферму, геометрия которой видоизменяется не только за счёт изменения длины гидроцилиндров, но и дискретного регулирования длины верхних поясов (стержней) обеих секций стрелы.
При силовом расчете двухзвенной шарнирно-стержневой стрелы считаются известными координаты точек А (а, в, -с) и В (-а, в, -с) крепления гидроцилиндров пространственного приводного механизма на основании; в выбранных системах отсчёта (рис. 2), координаты опоры О равны нулю. Известны также геометрические размеры двухзвенной шарнирно-стержневой стрелы, длина гидроцилиндров и их ход штока. Плоские фермы треугольников и, в частности, плоская ферма ОС коренной секции (рис. 1) первоначально трактуются как стержни, а при разработке расчётной схемы секции будет учитываться её реальная конструкция.
Требуется определить усилия F1, F2, F3 в штоках гидроцилиндров (параллельные гидроцилиндры СD рукояти рассматриваются как одно кинематическое звено). В числе искомых величин реакции R0 и R01 в шарнирах О и О1 и момент в опорном шарнире О (на рис. 4, показан вектор-момент ![]() ). Изменения геометрии стрелы за счёт длины верхних стержней не рассматривается, как не принципиальное [1, 2].
). Изменения геометрии стрелы за счёт длины верхних стержней не рассматривается, как не принципиальное [1, 2].
Сначала определяются искомые величины в системе Оx1y1z1, координатная плоскость Оy1z1 которой отслеживает поворот стрелы в горизонтальной плоскости на угол y и совпадает с плоскостью стрелы. С учётом того, что коренная секция набрана из стержней, составляющие R2 и R3 реакции в опоре О направлены по стержням, а третья составляющая R1 – перпендикулярно плоскости стрелы – вдоль оси Оx1.
Благодаря этому схема расчёта коренной секции и системы в целом упрощается – пространственная система сил сохраняется лишь по отношению к усилиям F1 и F2 в штоках гидроцилиндров пространственного приводного механизма. С учётом этого координаты xС и xК в системе Оx1y1z1 равны нулю.
Составим уравнения равновесия сил и моментов, действующих на шарнирно-стержневую стрелу, в подвижной системе координат Оx1y1z1. При рассмотрении стрелы в целом усилие F3 в штоках гидроцилиндров рукояти и реакция в шарнире О1 являются внутренними силами.
С учётом этого имеем:
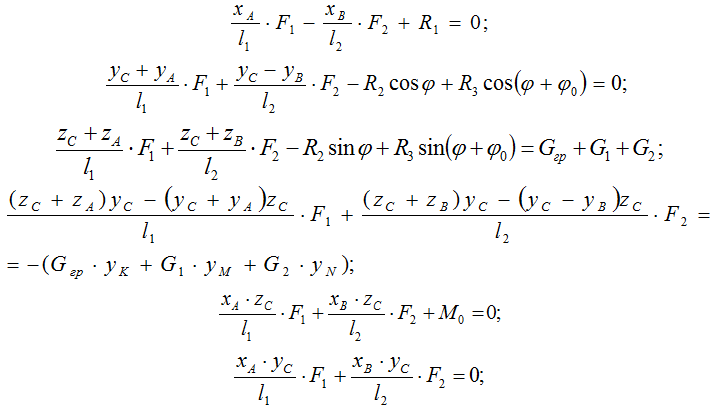 (1)
(1)
где yM, yN – координаты вдоль оси О y1 центров коренной секции и рукояти; zA = zB = - c (рис. 2).
В результате решения системы алгебраических уравнений (1), определяются искомые величины F1, F2, R1, R2, R3, M0. Во избежание громоздких выражений решение в общем виде не приводится. Вместе с тем, переходя от “затвердевшей” к реальной системе, отметим, что искомые величины являются функциями длины l1 и l2 гидроцилиндров и обобщённых координат j и y. Следовательно, полное решение задачи силового анализа – это определение диапазона изменения названных величин, в том числе усилий F1 и F2 в штоках гидроцилиндров.
В отличие от традиционных монолитных коренных секций, здесь сила RСx проходит через специальный шарнир С и его цапфы, поэтому не образуется момент закручивания фермы ОС. Сила RСx воспринимается поперечным сечением этой плоской фермы, которая, выполнена жёсткой – с перемычками (рис. 1). Сила R1 является незначительной и замыкается в опорно-поворотном устройстве – в опоре О.
Для определения остальных неизвестных F3 и R01 можно рассматривать равновесие рукояти в той же системе координат Оx1y1z1, координатная плоскость Оy1z1 которой совпадает с плоскостью стрелы (рис. 2).
Силовой анализ выполняется согласно законам статики. Для рассматриваемого гидроманипулятора (с плавным и бесступенчатым регулированием скорости перемещения штоков гидроцилиндров, коренной секции, рукояти и груза) коэффициент динамичности кд = 1,05 … 1,15.
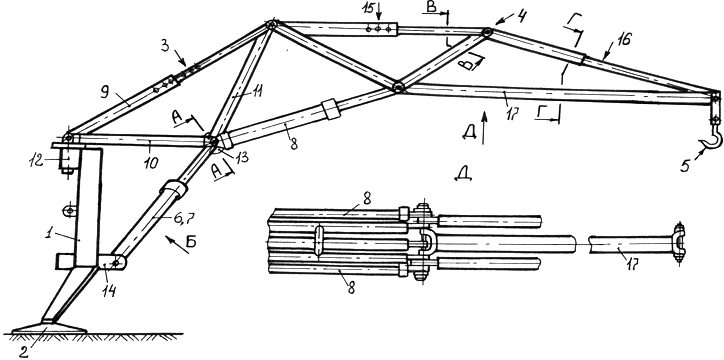
Рис. 1.– Шарнирно-стержневой гидроманипулятор
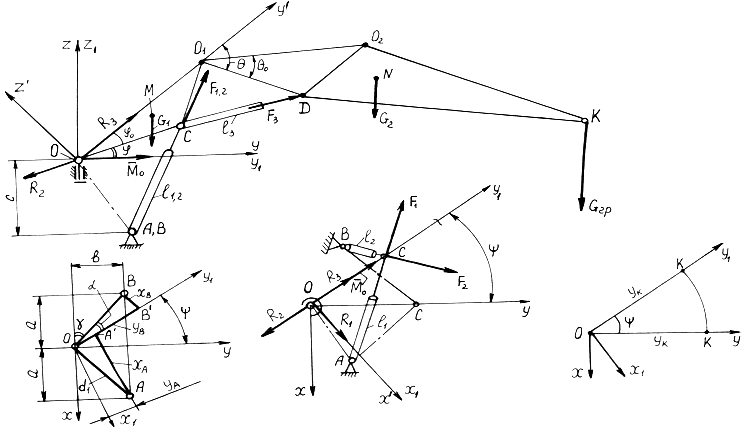
Рис. 2 – Силовая схема шарнирно-стержневого гидроманипулятора
Литература
- Кривельская Н.В. Совершенствование сельскохозяйственных шарнирно-стержневых гидроманипуляторов с пространственным приводным механизмом: Дис. … к-та техн. наук / ВГСХА. – Волгоград, 2004. – 196 с.
- Кривельская Н.В. Совершенствование сельскохозяйственных шарнирно-стержневых гидроманипуляторов с пространственным приводным механизмом: Монография / ВГСХА. – Волгоград, 2010. – 104 с.