О функциональной схеме системы обеспечения заданной глубины погружения океанологического зондирующего устройства
О функциональной схеме системы обеспечения заданной глубины погружения океанологического зондирующего устройства
Аннотация
Работа посвящена проблеме обеспечения требуемой глубины погружения исследовательской аппаратуры при проведении морских судовых экспедиций. Исследованы несколько типовых выполненных при участии автора экспедиционных ситуаций работы с зондирующим океанологическим оборудованием, опускаемым посредством специально разработанной морской электрической лебёдкой. Проанализирован также опыт работы с буксируемым оборудованием и зондирование с помощью донных лебедок. Представлена функциональная схема обеспечения заданной глубины погружения океанологического зондирующего устройства с борта судна. Зонд оснащен индустриальным датчиком абсолютного гидростатического давления и акустическим альтиметром. При этом заданная глубина погружения обеспечивается применением специальной электрической лебедки, частотный привод которой управляется программируемым логическим контроллером, сравнивающим текущую глубину погружения зонда и расстояние до дна с задаваемыми оператором значениями. Кроме того, в алгоритме контроллера реализован алгоритма цифрового регулятора демпфирования колебаний вывешенного на кабель-тросе зонда. Это позволит минимизировать влияние качки судна на точность выдерживания глубины. Статья является основой для технического задания на рабочее проектирование системы обеспечения глубины.
1. Введение
Традиционно для проведения морских экспедиционных исследований in situ используются многоканальные измерительные зондирующие комплексы . В них набор датчиков различных параметров, конструктивно объединенных на какой-либо раме в погружаемый зонд, опускают с помощью тросовой лебедки на заданную глубину. В автономном варианте используется грузонесущий трос, запись измерительных данных во внутреннюю память зонда и считывание их после подъема зонда из воды. При этом предварительно определяют глубину места с помощью судового эхолота и опускают зонд от поверхности до дна, примерно оценивая приближение дна по счетчику длины вытравленного троса, затем поднимают зонд на поверхность. Более точной и оперативной является передача данных от зонда на борт судна по грузонесущему кабель-тросу, это требует специальной кабельной лебедки. При этом информация о глубине погружения зонда поступает в реальном времени. Однако по-прежнему основная нагрузка по обеспечению заданной глубины погружения зонда лежит на операторе лебедки, который должен неустанно обеспечивать заданные режимы, что осложняет выполнение высокоразрешающих по глубине исследовательских экспериментов. В работе исследуется применение созданной ранее под руководством автора морской электрической лебедки и система управления ею. Результатом исследования является разработка функциональной схемы системы обеспечения заданной глубины погружения океанологического зондирующего устройства, обеспечивающей эффективное проведение современных зондирований с высокоточной привязкой к глубине погружения. При этом увеличится точность выдерживания заданной глубины и упростится работа оператора лебёдки.
2. Методы и результаты исследования
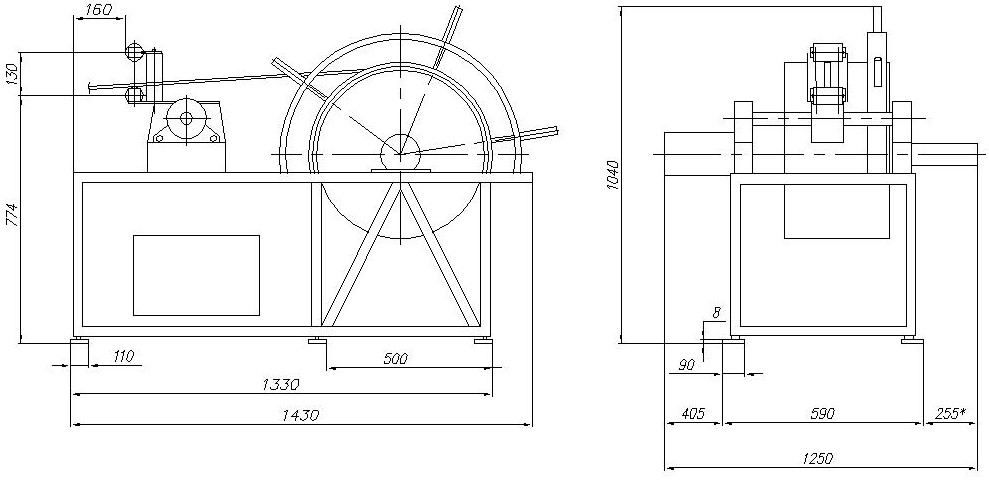
Рисунок 1 - Габаритный чертёж лебедки морской электрической
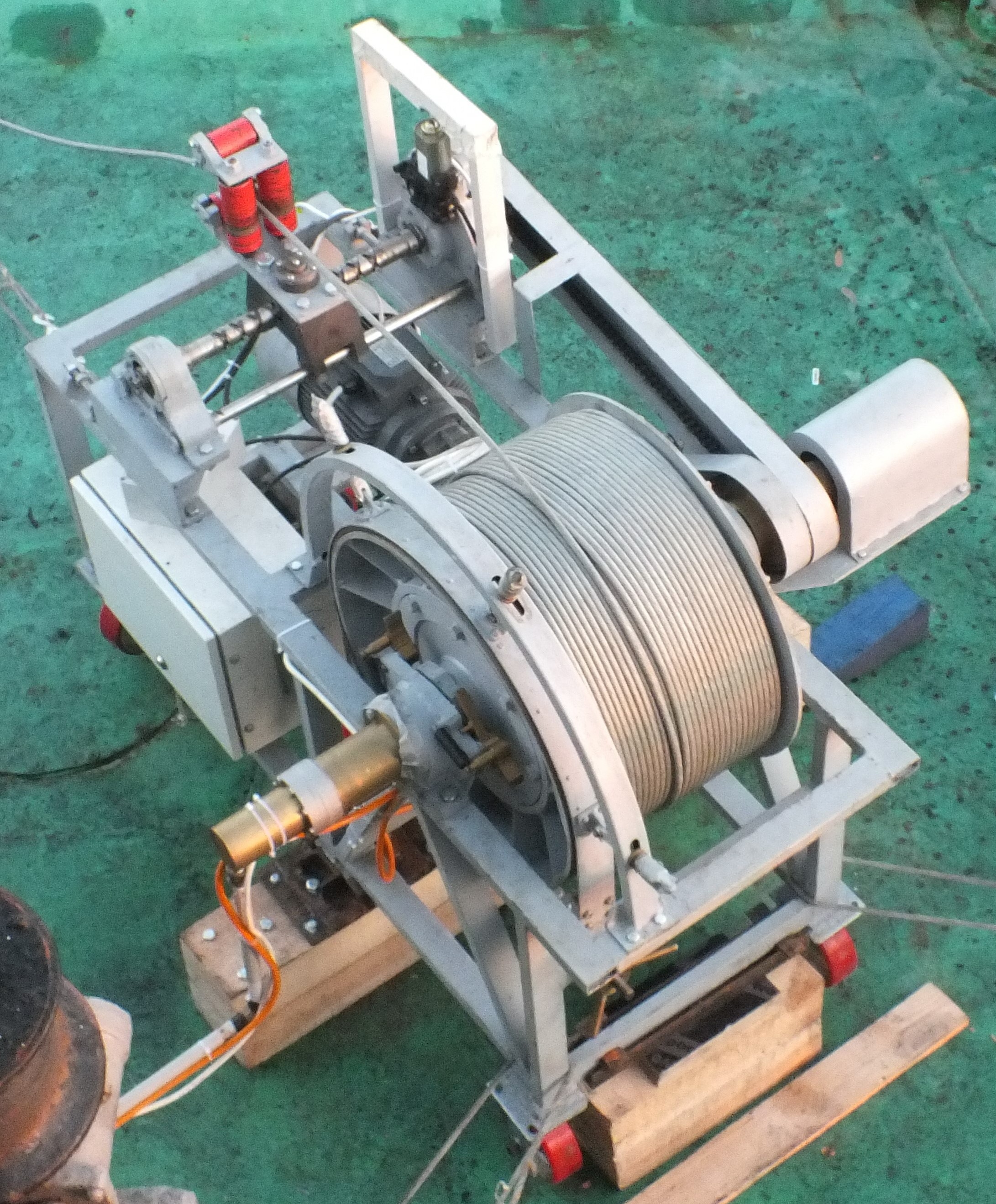
Рисунок 2 - Внешний вид лебёдки
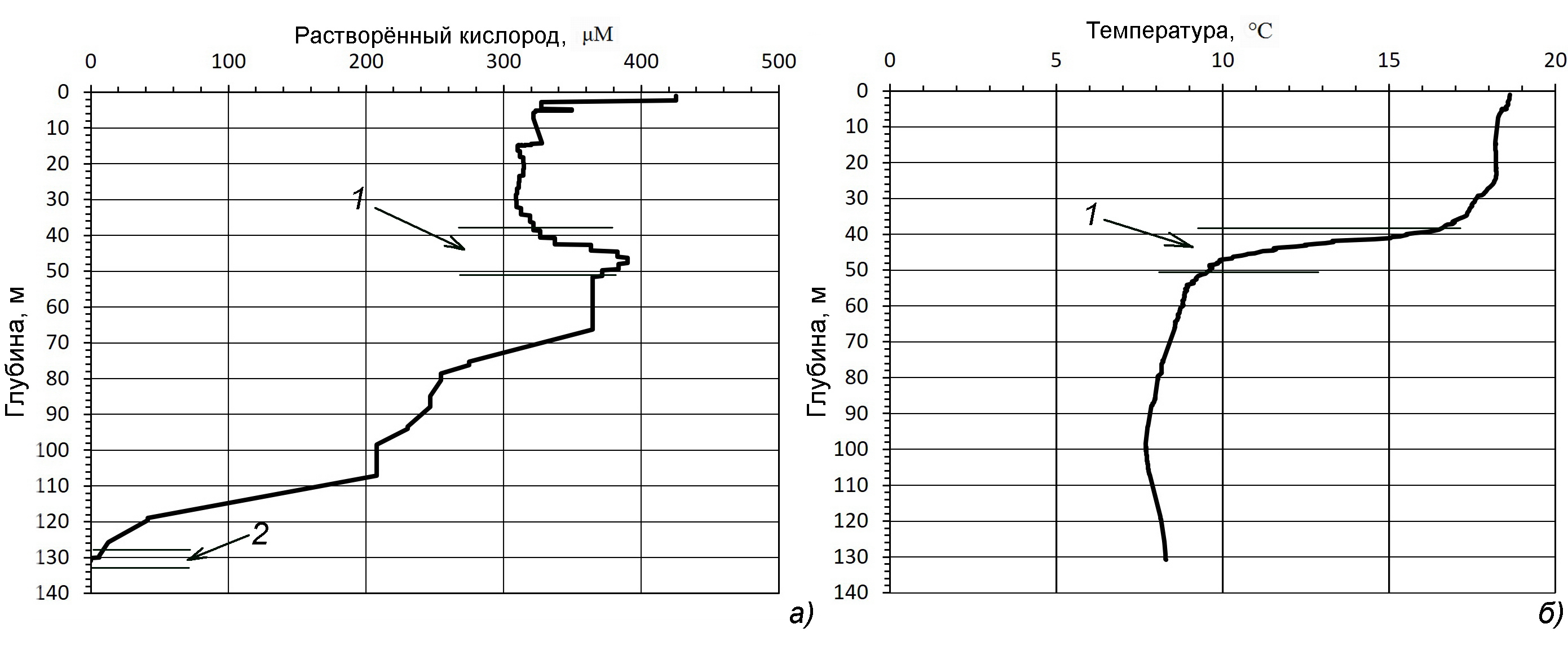
Рисунок 3 - Профили растворённого кислорода (а) и температуры (б), Чёрное море вблизи Анапы, 15.10.13, 15:10

Рисунок 4 - Зондирование нижней границы замутненного ледником слоя. Залив Русанова. Точка 75°04.3385 N 060°34.0291 E 16/09/20 13:46 Глубина места 65 метров.
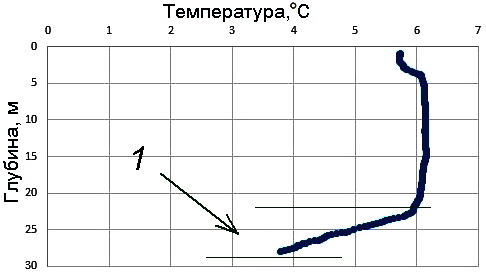
Рисунок 5 - Профиль температуры 13.09.21
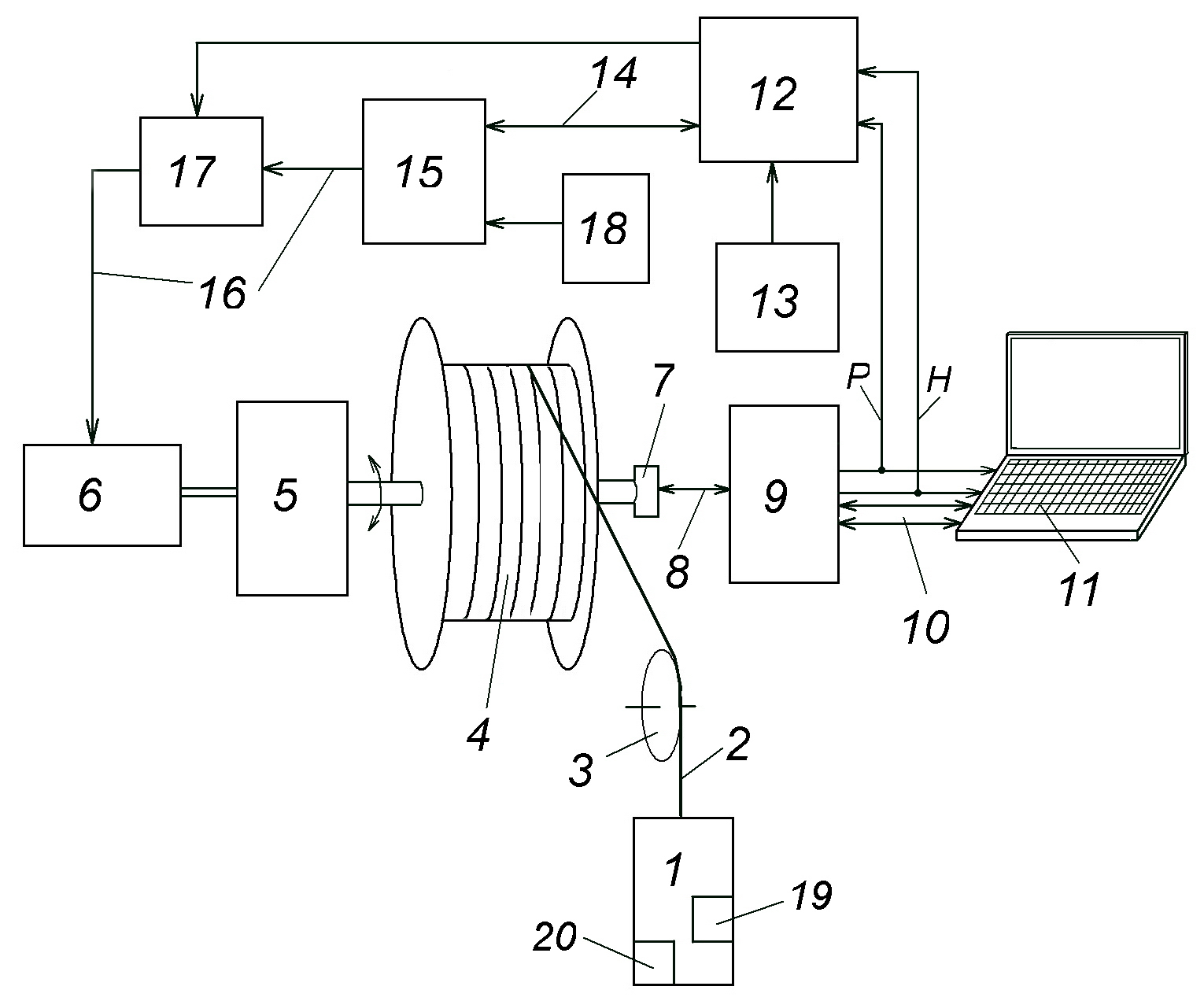
Рисунок 6 - Функциональная схема обеспечения заданной глубины погружения
Основные характеристики лебедки:
- питание 220 В 50 Гц 2,2кВт;
- тяговое усилие, номинал 250 кг;
- ёмкость барабана (кабель 9,4 мм) 350м;
- кабель-трос 9,4 мм одномодовое оптическое волокно и 4 электрические линии;
- тросоукладчик автоматический механический;
- электрический 8-мидорожечный и оптико-волоконный вращающиеся переходы;
- выносной проводной пульт управления с электромеханической подстройкой укладки кабеля.
Она является ключевым аппаратурным элементом, задействованным в данном исследовании. Экспериментальный материал (три экспедиции) по определению требований к перспективной системе обеспечения заданной глубины погружения получен во время нескольких экспедиций ИО РАН, данные по которым приведены ниже. Кроме того, проанализируем опыт наших коллег по работе с буксируемыми подводными аппаратами и системами зондирования с помощью донных лебедок.
2.1. Первая экспедиция
Выполнены погружения измерительного многоканального зонда до глубины 280 метров с борта НИС «Денёб» в октябре 2013 года . Выполнялись видеосъемки зоопланктона многоканальным погружаемым гидролого-оптико-химическим зондом вплоть до глубины 320 метров. В составе зонда был CTD-датчик miniCTD фирмы Valeport и датчик растворенного кислорода Oxygene Optode 4330F фирмы Aanderaa Data Instruments.
Данные глубины использованы от канала гидростатического давления CTD-датчика, входящего в состав зонда, информация от которого выводилась на экран оператора в виде непрерывной таблицы, в дальнейшем по ней были построены вертикальные профили температуры и растворенного кислорода, представленные на рисунке 3. Работа выполнялась при практически штилевых условиях моря. Оператор лебёдки использовал проводной пульт управления. Верхний перемешанный слой (ВПС) прослеживается до 40 метров, далее резкий термоклин до 50 метров (область 1 рисунка). Далее ярко выражена характерная для Чёрного моря граница бескислородной зоны, причем очень резкого градиента (область 2). В некоторых погружениях кислородная граница наступала буквально за 1–2 метра глубины. Особый интерес при регистрации зоопланктона представляют именно области термоклина ниже верхнего перемешанного слоя и граница кислородного слоя. Следовательно, для таких случаев желательно обеспечивать стабилизацию зонда на глубине границы с точностью выше одного метра, для чего желательно иметь некую полуавтоматическую обратную связь по глубине или даже параметру кислорода в системе управления лебедки. Это упростит работу с лебедкой оператору, увеличит точность отслеживания граничных явлений.
2.2. Вторая экспедиция
В сентябре 2020 года выполнялось зондирование погружаемым зондом с камерой регистрации частиц в акватории Карского моря (81й рейс НИС Академик Мстислав Келдыш). В частности, съемка велась в зонах выноса плюмов талых вод ледников Новой Земли, насыщенных взвешенным веществом. На одной из станций, находясь в зоне выноса вод от ледника с борта корабля, наблюдали визуально сильно мутную воду. Вертикальное зондирование зондом с видеокамерой позволяло визуально обнаруживать нижнюю границу плюма, которая могла быть достаточно резкой (см. рисунок 4). Светильник видеокамеры создает яркий белый фон на экране в случае наличия взвеси в воде, а в области без взвеси фон экрана практически черный. На рисунке 4 видно, что нижняя граница мутного слоя лежит между 13,5 и 15 метрами. Погружение осуществлялось с помощью лебедки морской электрической, глубина определялась с помощью канала давления глубины CTD-датчика, установленного на зонде .
Для выполнения картирования нижней границы мутных вод по акватории нужно иметь возможность точного позиционирования зонда по глубине, а для этого иметь режим управления глубиной зонда непосредственно с клавиатуры ноутбука оператора зонда.
2.3. Третья экспедиция
Выполнены погружения измерительного регистратора частиц взвеси до глубины 37 метров с борта НИС Академик Мстислав Келдыш в сентябре 2021 года с помощью ручной лебедки. На одной из станций в Карском море в области вблизи дна были зарегистрированы скопления эуфаузиид . Явление наблюдалось в слое резкого уменьшения температуры (рисунок 5, область 1). Дальнейшую работу по регистрации сообществ зоопланктона в области нескольких метров от дна целесообразно вести с лебёдки морской электрической и зондом с регистрирующей камерой, датчиком давления (глубины) и акустическим эхолокационным датчиком расстояния до дна.
Далее приведем пример опыта работы ИО РАН с буксируемыми подводными аппаратами. Для работы используются штатные судовые кабельные лебёдки НИС с гидравлическим приводом. Буксируемые носители гидролокационных антенн и приборов, как правило, пассивные и не имеют собственных органов изменения параметров движения. Управление носителем по глубине осуществляется с помощью изменения длины вытравленной части кабель-троса и изменения скорости хода судна. Основной задачей управления носителем в ходе гидролокационного обследования дна является удержание его на изобате (на линии постоянной глубины) в определенном коридоре расстояний до грунта, а также обеспечение безопасности буксировки при работах вблизи дна. Эта задача решается путем поддержания постоянного хода судна и контроля глубины погружения носителя судовой лебедкой по данным пилотажных датчиков (глубиномер, эхолот, вперед направленный локатор) . В случае видеосъемки с буксируемого носителя морского дна расстояние до него составляет максимум несколько метров. Обеспечение удержания носителя на заданной изобате или необходимом расстоянии до дна требует напряженной работы оператора лебёдки, отслеживания им изображения с видеокамеры, установленной на носитель и величину расстояния до дна с помощью альтиметра.
Также укажем на особенности работы зондирующими устройствами с помощью специальных лебедок, закрепленных на морском дне. В автономной гидроакустической станции с автоматической адаптацией к глубине установки используется специальная донная лебёдка, глубина установки зондирующего устройства устанавливается по оптимальному сигналу акустической засветки, для чего сначала осуществляется зондирование от поверхности до дна, вычисление необходимой глубины и подъем зондирующего устройства до неё разматыванием кабеля с барабана под действием положительной плавучести зонда. Принцип использования донной лебёдки применён также в .
Привязка систем обеспечения заданной глубины к дну практически устраняет волнение поверхности моря на измерения. Однако в системе, работающей с борта НИС требуется принять меры для минимизации передачи вертикальных движений качки судна через кабель на зондирующее устройство.
Таким образом, анализируя опыт проведения зондирующих погружений можно сказать следующее:
- необходима возможность стабилизации глубины;
- используется информация о глубине как правило с канала гидростатического давления CTD-датчика;
- установка заданной глубины или расстояния до дна осуществляется и поддерживается вручную оператором лебёдки;
- необходимо принять меры для устранения влияния вертикальных движений кабель-троса от качки судна.
При оценке возможностей создания системы обеспечения глубины нами изучены особенности судовых электротехнических систем, представленные в , .
Предлагаем использовать промышленный аттестованный датчик давления как основной элемент определения вертикального положения зонда в воде. Пример такого прибора представлен в . Такой датчик имеет точность до 0,1% от верхнего предела измерений. Это не такая точность как у канала гидростатического CTD-датчика (в них точность достигает до 0,005% от верхнего предела измерений), но её более чем достаточно для обеспечения стабилизации глубины с учетом прочих погрешностей системы (точности вращения барабана, влияния волнения моря и т.п.). При этом такие датчики разработаны для работы в тяжелых индустриальных условиях, не требуют частой калибровки. Расстояние до дна измеряется акустическим альтиметром, например типа . Данные текущей глубины и расстояния до дна необходимо завести в систему управления лебедки морской электрической и включить их в контур обратной связи для полуавтоматического слежения за глубиной зонда.
Анализируя и объединяя все рассмотренные выше соображения, предлагаем следующую функциональную схему системы обеспечения заданной глубины (рисунок 6):
Система выполнена следующим образом: Измерительный зонд 1 погружается на грузонесущем оптиковолоконном кабеле 2, намотанным на барабан 4 лебёдки электрической и выведенной за борт на судовой крановой стреле через канифас-блок 3. Барабан 4 установлен на силовой раме через выход редуктора 5 и подшипниковый узел с вращающимся оптико-волоконным переходом 7. Барабан получает вращение от трехфазного асинхронного электродвигателя 6 через редуктор 5. Электродвигатель 6 запитывается через контактор 17 от частотного трехфазного преобразователя 15 по силовым кабелям 16. Частотный преобразователь управляется либо от программируемого логического контроллера 12 по шине Modbus 14, либо от аварийного ручного пульта управления 18.
Обеспечение заданной глубины осуществляется следующим образом: измерительные данные зонда вместе с данными датчика давления (глубины) 20 зонда и акустического датчика расстояния до дна 19 поступают по оптико-волоконному кабелю 2, вращающийся переход 7, палубный оптический кабель 8 в медиаконвертер 9. Далее измерительные данные поступают в компьютер оператора 11. Данные датчика глубины 20 и расстояния до дна 19 также поступают в компьютер для индикации, но кроме того поступают на входы промышленного контроллера 12. Также к контроллеру подключен проводной пульт управления 13 оператора лебедки. Пульт оснащен переключателями вращения барабана лебедки на спуск и подъем, регулятором скорости вращения, индикатором глубины зонда и переключателем режима Ручной или Стабилизация. Контролер 12 формирует сигнал управления частотным преобразователем 15 в зависимости от исполняемого режима.
Уменьшение погрешности стабилизации глубины установки зондирующего устройства, связанной с качкой судна осуществляется применением в контроллере лебедки алгоритма цифрового регулятора демпфирования колебаний. Реализация подобного алгоритма применительно к гашению колебаний при подъеме груза тросовой лебедкой рассмотрена в .
Оператор вручную управляет спуском/подъемом зонда с пульта. При получении информации от оператора зонда о приближении к заданной глубине он замедляет движение барабана и в нужный момент включает стабилизацию. После этого контроллер 12 выполняет программу слежения за глубиной или расстоянием до дна с помощью реверсирования электродвигателя, меняя выходное напряжение частотного преобразователя. Эффективность стабилизации зависит от водоизмещения судна и волнения моря.
Некоторые предложения по конструкциям системы:
- основную часть оборудования системы следует расположить в электрошкафу лебедки, закрепленном на её раме. На раму монтируется и аварийный пульт управления лебедкой;
- датчики глубины и расстояния до дна штатно закрепляются на сварной раме зонда и подключаются к блоку сбора океанологических данных;
- проводной пульт управления находится на палубе в удобном для оператора лебёдки месте.
3. Заключение
Выполняемые в реальных морских экспедициях исследования позволяют сформулировать требования к функциональной схеме системы обеспечения заданной глубины погружения. Предлагаемая система несложна для реализации и позволит упростить проведение современных океанологических экспериментов, давая возможность сосредоточить внимание команды исследователей на научной составляющей выполняемых работ. Непосредственная реализация системы выходит за рамки данного исследования и является предметом будущей детальной инженерной разработки, основой для Технического задания на проектирование которой может являться эта статья.