ОПТИМИЗАЦИЯ ЛОГИСТИКИ РАННЕГО СБОРА И УТИЛИЗАЦИИ ТВЕРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ В МЕГАПОЛИСЕ РФ
ОПТИМИЗАЦИЯ ЛОГИСТИКИ РАННЕГО СБОРА И УТИЛИЗАЦИИ ТВЕРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ В МЕГАПОЛИСЕ РФ
Аннотация
Ежегодно количество отходов, производимое в мегаполисах России, несомненно возрастает. Важность контроля и улучшения коммунальных и логистических процессов по вывозу и утилизации мусора невозможно недооценить. Только за счет структурных изменений появляется возможность увеличить эффективность этих процессов. Ситуация осложняется и тем, что правильное введение «умных систем» мониторинга на сегодняшний день исключено. Спроектирована структурная модель операций, которая способна значительно сократить временные затраты. На сегодняшний день коммунальные службы полагаются на некорректную информацию о накопленном и вывезенном мусоре, это обуславливает увеличенный пробег автомобильной техники. Чтобы эффективно использовать имеющиеся временные ресурсы, предлагается использовать ранний забор мусора, при котором периодичность извлечения отходов из контейнеров сокращается. При такой системе увеличивается количество заездов автомобильной техники для забора, при этом уменьшает незапланированный пробег из-за некорректных прогнозов. В статье обосновывается необходимость моделирования кратчайшего расписания операций мусоровозов для повышения эффективности работы этого транспорта, при этом такое расписание следует составлять на несколько периодов вперед. Для разработки оптимального по быстродействию циклического расписания работы совокупности автомобилей-мусоровозов предложена методика, которая базируется на упорядочении смешанных графов.
1. Введение
Организация сбора, вывоза и утилизации городского мусора является сложным участком муниципального управления. Сложность основывается на том, потребности городов в утилизации мусора значительно превышают возможности логистики сбора. Объемы по накоплению отходов чаще всего не полностью известны коммунальным службам. Процесс накопления твердых бытовых отходов (ТБО) чаще всего носит сезонный характер и сопровождается недельной и суточной хаотичностью. Поэтому спланировать работу автотранспортных средств (АТС) в таких условиях крайне сложно. Существует также противоречие в методологии организации вывоза ТБО в мегаполисах. Коммунальные службы руководствуются нормами образования мусора в зависимости от численности населения. В условиях нехватки информации о накоплении отходов за конкретный период, водители мусоровозов в целях снижения перепробега срезают плановые маршруты сбора. Однако частотность забора ТБО превышает чем фактическое накопление мусора в контейнерах. Поэтому важно спроектировать наикратчайший маршрут следования, а также расписание его выполнения. В следствии того, что в данный момент службы не располагают такими расписаниями работ, некоторые контейнеры мегаполиса набиты отходами под завязку, а это нарушает санитарные и экологические нормы. В эпоху технологий перед коммунальными службами открывается уникальная возможность использовать приборы дистанционного контроля за процессом заполнения мусорных баков. При этом стоит отметить, что использование таких систем учета не гарантирует решение проблемы в полной объеме. На сегодняшний день моделирование таких расписаний не реализуется на практике. Чаще всего муниципальные органы не способны автоматизировать процессы из-за экономических аспектов. Зачастую территориальные власти городов России за счет нехватки средств не имеют возможности дооборудовать все мусорные баки телеметрическими средствами. Данный вопрос обостряется процессами урбанизации и ростом количества населения в мегаполисах, а это в свою очередь без сомнения приводит к росту образования отходов. Именно поэтому исследования, которые напрямую затрагивают решение мусорной проблемы актуальны и по сей день.
Цель исследований – создать эффективный график работы АТС, осуществляющих вывоз ТБО. Данный график позволит оптимизировать маршруты сбора мусора, он будет составлен с учетом наполнения контейнеров в режиме реального времени и позволит АТС двигаться по кратчайшим маршрутам, соединяющим все точки сбора мусора. Ключевая цель - сделать сбор мусора экономичным, особенно в крупных городах, где мусора больше и, соответственно, много затрат на его вывоз. Для достижения цели следует решить следующие задачи:
– создать математическую модель грузопотоков и временных связей транспортных операций по сбору и транспортировке мусора, учитывающую время, которое требуется на сбор и перевозку мусора, и учитывающую реальные объемы мусора в конкретной точке сбора;
– спроектировать алгоритм поиска кратчайшего активного расписания операций по сбору, который будет отвечать всем современным стандартам для оптимизации маршрутов автомобилей по перевозке ТБО, в функционале которого будет заложена опция по считыванию наполненности мусорных баков режиме реального времени;
– провести исследование, позволяющее понять, насколько уменьшается время, которое тратят АТС на работу, и насколько эффективнее используется парк автомобилей, когда мусор собирают по оптимизированным маршрутам.
2. Анализ литературных данных и постановка проблемы
В статье подтверждается, что осуществление эффективного сбора отходов становится огромной проблемой для всех стран в мире. Вводятся современные норма и стандарты по снижению загрязнения природы, разделения мусора по категориям отходов в связи с ростом численности населения мегаполисов. С другой стороны, в статье было отмечено, что для маршрутизации мусоровозов не используются эффективные компьютерные средства принятия решений. Автором было предложено решать задачу маршрутизации АТС для раздельного сбора ТБО с помощью алгоритма поиска большого соседства. Задача оптимизации маршрутов сбора ТБО в условиях мегаполиса представляет собой сложную проблему, обусловленную фактическим присутствием огромного массива данных. Даже современные научные труды не предполагают мониторинг фактической интенсивности накопления отходов в сортировочных контейнерах.
В работе рассматриваются современные технологии трекинга, например: сенсоры объема, радиочастотная идентификация, GPRS и GPS, они позволяют получать данные о накоплении ТБО в режиме реального времени. Это открывает новые возможности для совершенствования организации сбора отходов.
Существующие подходы к «умному» менеджменту сбора мусора можно разделить на три группы:
1) метод лимитов и нормативов;
2) «умной» системе сбора мусора – Smart Waste Collection Routing (SWCR);
3) «умных» этапов сбора мусора .
Снижено влияние неравномерной загрузки автомобилей-мусоровозов
в подходе SWCR. В данном подходе выбор контейнеров, которые нужно посещать ежедневно, и обоснование последовательности их сбора осуществляется одновременно . Используются критерии максимальной прибыли от перевозки ТБО. Модель, использованная исследователями, представляет задачу маршрутизации техники, учитывая, что реальный объем заполнения мусорных баков известен тем, кто управляет процессом. Однако такая модель рассчитана только на одно АТС.
Подход «умных» периодов, который применялся в модели SWCR, был скорректирован в работе . Модифицированная модель включает в себя эвристическую процедуру, которая определяет оптимальное время начала планирования маршрутов для увеличения прибыли в течение определенного периода времени. Данный подход направлен на минимизацию неэффективного использования ресурсов, а также учитывает заранее установленный уровень обслуживания. Однако использованная авторами модель динамически улучшает полученное расписание работы АТС только относительно переполненных контейнеров. Результаты применения парков АТС на сборе мусора неизвестны.
Из анализа литературных источников можно сделать такой общий вывод, что оптимизация организации сбора и утилизации ТБО в условиях мегаполиса приобретает особую актуальность, одновременно усложняясь с ростом городского населения. Задача маршрутизации АТС без учета фактической интенсивности наполнения мусорных контейнеров становится бессмысленной, так как не отражает реальные потребности. Интеграция интеллектуальных систем в процесс сбора мусора приводит к усложнению задачи оптимизации маршрутов. Определение наилучших маршрутов возможно только при учете динамического изменения наполнения отходных баков. Для этого необходимо создать или переиспользовать алгоритмы, в которых учтена такая динамика. Процесс планирования в таком случае должен быть циклическим, это означает, что маршруты следования спецтехники нужно распределять равномерно по дням в рамках планируемого периода. Рост мегаполиса приводит к увеличению объема входных данных о накоплении отходов, а с другой стороны - к накоплению опыта выполненных перевозок.
Разрабатываемая системы будущего должны представлять собой интеллектуальную сеть, в рамках которой все объекты процесса сбора и утилизации будут обмениваться информацией между собой, в том числе горожане и комплексы по рециклингу.
Спецтехника, которая обеспечивает транспортировку также становится еще одним источником загрязнения. Поэтому при решении задач оптимизации важно лоббировать критерий минимизации воздействия такой техники, а это становится возможным только благодаря сокращению протяженности транспортных заездов и за счет современных технологий, таких как внедрение электромобилей.
3. Основные результаты
Процесс накопления мусора является дискретным и стохастическим. Объем мусора, содержащийся в момент времени t в i-ом ом контейнере зоны сбора мусора, представляет собой частично-монотонную функцию с непрерывным аргументом ki (t). График наполнения контейнеров мусором характерен как для систем сбора, которые оснащены телеметрическими средствами контроля объема, так и обычными контейнерами. Их объединяет то, что опустошение баков происходит в фиксированные моменты времени, разделенные периодом 𝜏 -тактом. При наличии сенсоров объема опустошение осуществляется в моменты, когда ki=kmax.
Рассмотрим систему контроля входных потоков ТБО на мусорных площадках при применении модуляции входных данных по величине ki (Рис.1). Как видно из рис. 1, сбор ТБО подчиняется потоку контрольных данных по объемам наполнения. Также требуется правильно установить допуск на максимальное заполнение контейнеров Δk, который и является мерой неопределенности процесса наполнения. Особенностью этого подхода является то, что контейнеры могут опустошаться раньше, чем в момент 𝜏4. Выбор этого момента опустошения каждого конкретного контейнера напрямую зависит от спланированного маршрута движения АТС и оптимального распорядка сбора мусора на территории города. По итогу, осуществив «привязку» расписания к моменту достижения запланированного уровня наполнения контейнеров, поставлены жесткие временные рамки между операциями опустошения мусорных контейнеров.
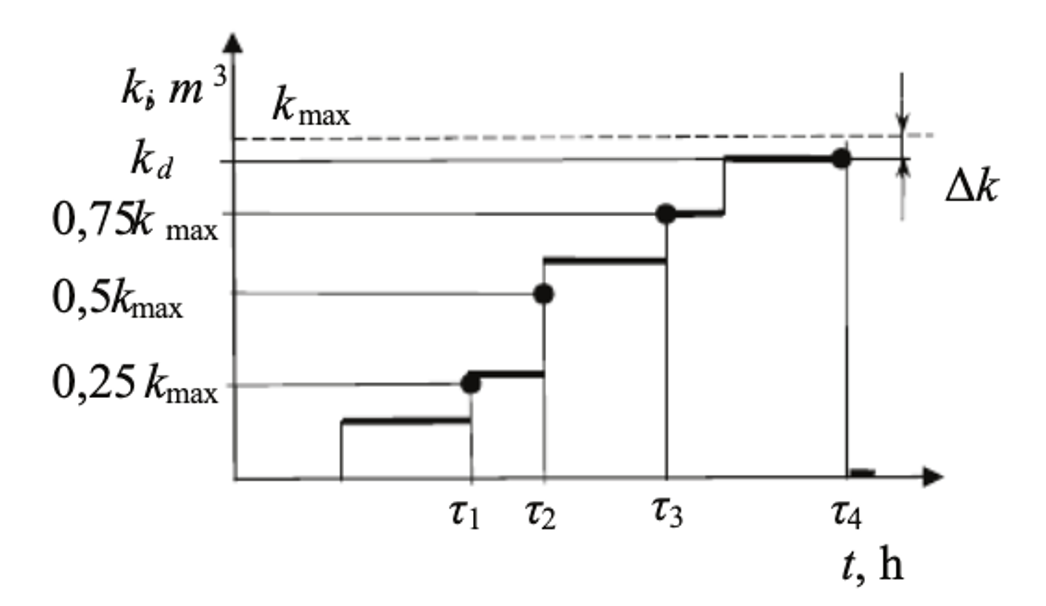
Рисунок 1 - График накопления, контроля и стула мусорного контейнера при модуляции процесса по объему наполнения:
kd – допустимый фактический объем контейнера; Δk – уровень заполнения
а) множествами моментов начала операций {tb.1, tb.2,… tb.N} и действительных значений {ai.j}, где i≠j, i,j=1..N, N – общее количество контейнеров в зоне обслуживания;
б) множествами моментов {tb.1, tb.2,… tb.N} и {te.1, te.2,… te.N}; где tb.z≠ te.z;
в) множествами моментов завершения операций b) {te.1,te.2,… te.N} и значений {ai.j}.
Принято, что ни один мусоровоз не будет иметь временной задержки с выполнением операций и транспортного цикла в частности. Поэтому должно строго выполняться условие (2), или условие: te. j - te.i = ei. j ,ei. j ¹ ai. jj (3), где ei.j – временная связь процессов завершения двух последовательных операций. Для оптимального расписания сбора мусора, в котором любые две операции i, j могут выполняться в произвольной последовательности, согласно теории расписаний должно выполняться требование:
tb.i = max(0, u j .i ) (4), где υj.i – цепь операций от операции i до операции j самой длительной продолжительности. Также известно требование однозначности расписания. Если по условиям задачи операция должна предшествовать операции j, и эти операции выполняет один и тот же АТС за один цикл, то должны выполняться равенства: tb, j - tb,i = ai. j = -(tb,i - tb, j ) = -aj .i , где ai. j = -aj .i (5)
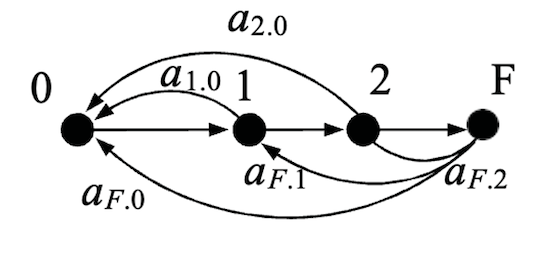
Рисунок 2 - Модель обратных временных связей:
0, F – фиктивные операции
Приоритетом данного исследования является оптимизация использования парка автотранспортных средств, которые занимаются забором и логистикой коммунальных отходов в рамках мегаполиса. Разработанный нами алгоритм использует данные о системе сбора отходов, включая информацию о типах и количестве (1-4) контейнеров на каждой площадке. Особое внимание уделяется сбору и вывозу органических отходов, так как их объем почти на 30% превышает объем других видов ТБО, поэтому вывоз органики является более срочным. Утилизация в мегаполисе устроена так, что сбором и транспортировкой мусора занимается несколько частных и государственных коммунальных предприятий. Так как при такой системе присутствует конкурентная среда, услуги по вывозу ТБО осуществляются качественно. Однако данная система утилизации отходов характеризуется децентрализацией сбора и транспортировки, что приводит к неэффективному использованию АТС из-за необходимости совершать длинные изнурительные маршруты. Поэтому задача организации работы АТС при децентрализованной системе имеет большую актуальность.
Изначально мы использовали неполные данные для построения эффективного расписания, так как мы рассматривали работу государственного коммунального предприятия, обслуживающего мусорные площадки. Для строительства модели оптимальных расписаний использовались данные о расположении мусорных контейнеров, полученные из картографического сервиса Яндекс Карты. Было учтено возможное влияние пробок на время перемещения между площадками, что позволило сформировать более реалистичные маршруты. Также мы учли и тот факт, что парк АТС располагается в черте города, а завод по переработке органических отходов, куда свозится мусор соответствующего сорта, – в пригородной зоне. Перевозка осуществляется специализированными АОЗ: мусоровозами СМ16-01 Стандарт МАЗ 5340С2, каждый из которых технологически вмещает 17 м3. Средняя эксплуатационная скорость АТС в пределах города составляет 22,5 км/ч. Данные о скорости брались из данных тахографов. Было установлено, что объем органических отходов не прессуется в транспортных средствах, поэтому объем накопления отходов соответствует объему вывоза. Количество мусоровозов в парке предприятия – 6.
Несмотря на отсутствие прямого контроля за объемом накопления отходов на площадках, а также вывозе органического мусора, была использована информация о вывезенном объеме отходов за прошлые периоды для определения среднего показателя интенсивности накопления (табл. 1). Планирование работы АТС по забору и вывозу отходов происходит на предприятиях каждую неделю. Соответственно показатели в таблице применимы к итогам моделирования недельного производственного задания. Просчет часовой интенсивности осуществлялся из того, что отходы в баках формируются в течение суток 16 часов: с 7-00 до 23-00.
Анализ данных показал, что интенсивность накопления отходов не является постоянной и изменяется в зависимости от времени года. В летние месяцы объем ТБО накапливается интенсивнее, это приводит к увеличению коэффициента неравномерности накопления.
Необходимо отметить, что период пандемии (2019-2020 годы) внес коррективы в статистику накопления отходов. Однако, мы можем прибегнуть к данным за 2020 год, интенсивность равна 0,04 м3/час, при этом учитывается максимальная интенсивность – до 0,075 м3/ч. Обычно объем бака составляет 1,1 м3, он становится полным за 27 часов. Для проектирования оптимальных графиков за основу взято значение допустимого наполнения бака: 0,55, 0,66, 0,77, 0,88, 1,0 м3. Следовательно частота вывоза отходов из одного мусорного контейнера варьируется в пределах τ=13,5-24,5 часов.
Таблица 1 - Данные о количестве отходов, вывозимых коммунальным службами
Индикатор | 2019 год | 2020 год | 2021 год | 2022 год |
Средний общий объем вывозимого мусора за неделю, м3 | 840 | 1180 | 930 | 1108 |
Всего баков | 192 | 216 | 232 | 244 |
Коэффициент неравномерности объемов | 1,46 | 1,62 | 1,66 | 1,87 |
Интенсивность накопления мусора в рамках одного бака, м3/ч | 0,039 | 0,0489 | 0,0358 | 0,0405 |
Условия и ограничения:
– плановый интервал вывоза мусора – 7 дней;
– интервал работы мусоровоза – 7,5 часов;
– рабочие дни: с понедельника по субботу;
– длительность нулевого прогона – 20 мин.
4. Обсуждение результатов
Эффективные по оптимальности графики производительности, запланированные на неделю вперед – то, что нам удалось получить в ходе моделирования. Используя такие исходные данные, были получены положительные результаты моделирования для 6, 5, 4 грузовиков, которые могут вывозить мусор одновременно. При меньшем количестве грузовиков было невозможно обеспечить допустимое время дежурства водителей. 50% решений не были найдены при использовании 4 грузовых автомобилей и допустимом уровне заполнения контейнеров из-за превышения лимита недельного рабочего времени водителей. Полученные результаты составления оптимальных расписаний работы АТС по вывозу ТБО в сети мегаполиса показывают, что применение алгоритма оптимизации уменьшает пробег на маршрутах при постоянном объеме накопления отходов.
5. Заключение
Ряд важных выводов, которые удалось сделать в ходе работы:
1. При росте объемов отходов, продуцируемых населением мегаполисов нужно с большей точностью и в более широком масштабе планировать и контролировать процессы сбора и транспортировки мусора.
2. Предложенный алгоритм упорядочения временных моделей процессов сбора и транспортировки мусора является мета-эвристическим, однако он дает гарантированное решение задачи оптимизации расписания с удовлетворительной точностью. Алгоритм можно использовать для процессов, состоящих из более 300 периодически повторяющихся операций, что снимает его ограничения по применению по сравнению с известными алгоритмами.
3. Применение допусков заполнения объемов мусорных контейнеров позволяет уменьшить пробег автомобилей-мусоровозов на маршрутах, поскольку в таком случае маршрут динамически изменяется относительно заполненных контейнеров.