ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ НА ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ НА ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Аннотация
В статье рассматриваются вопросы идентификации объектов (подвижного состава, специализированной техники и обслуживающего персонала), осуществляющих передвижения по железнодорожной инфраструктуре. Использование оптического кабеля, проложенного вдоль железнодорожного пути (под землей), позволит контролировать движение объектов по железнодорожной инфраструктуре, а также контролировать незаконное проникновение посторонних объектов. В статье изложены решения по выделению из зашумленного сигнала полезного – соответствующего различным типам объектов с использованием адаптивной фильтрации на основе фильтра Калмана (определение параметров распределения случайной зашумляющей помехи и полезного сигнала). В работе рассмотрено решение задачи распознавания различных объектов, двигающихся по железнодорожной инфраструктуре по производимому ими сигналу, на основе сверточных нейронных сетей, а также предложено решение по определению параметров движения состава – его целостность и количество вагонов.
1. Введение
Разработка методов обработки сигналов с оптического кабеля (ОК), проложенного в земле полотна инфраструктуры, является актуальной научной задачей, обусловленной возрастающей потребностью в определении различного рода воздействий, оказывающих влияние на решение широкого круга вопросов охраны труда, обеспечения безопасности движения и т.д. Распределенный оптоакустический датчик представляет собой оптическое волокно, по которому передаются импульсы в оптическом или ближнем инфракрасном диапазоне. Часть энергии импульсов рассеивается на микронеоднородностях оптического волокна и отражается в обратном направлении. По отраженному сигналу с помощью фазочувствительного оптического рефлектометра формируется интерференционная картина, изменяющаяся при внешнем воздействии на оптическое волокно, в том числе при виброакустическом воздействии. По изменению интерференционной картины можно судить о месте воздействия на волокно, величине и характере этого воздействия. Необходимо отметить, что воздействие на датчик ОК происходит на всей длине его укладки, в связи с чем такой оптоволоконный датчик рассматривается в качестве распределённого сенсора. Включение рефлектометра позволяет с определенной точностью указывать на место возникновения колебаний. Сенсорный датчик ОК воспринимает механические колебания, создаваемые объектами на всем протяжении укладки, а именно: подвижным составом, обслуживающим персоналом, посторонними механизмами, машинами, людьми животными и другими объектами, пересекающими инфраструктуру и движущимися на инфраструктуре. Задача идентификации объектов требует выделения в суммарном сигнале тех областей, которые обусловлены их движением.
Например, задача определения местоположения подвижного состава требует выделения из суммарного сигнала тех областей, которые относятся к подвижному составу. Определение принадлежности сигнала к определенному источнику рационально решить с использованием нейронных сетей с применением методов обучения.

Рисунок 1 - Сигналы с распределенного сенсора от различных объектов
2. Обзор технических и теоретических решений по использованию распределенного сенсора оптического кабеля
В статьях , суть предлагаемого технического решения состоит «…в использовании в качестве датчиков контроля свободности и диагностики технического состояния пути волоконно-оптического кабеля (ВОК), включающего в себя датчики температуры, давления и деформации, выполненные с применением технологии волоконно-оптических брэгговских решеток (ВОБР)». Диагностика состояния пути и определение местонахождения подвижных единиц, скорости их движения, веса основаны на явлении интерференции мод в волоконном световоде на основе ВОБР. Более того, появляется возможность организации контроля дефектных буксовых узлов на вагонах, дефектных осей тележек, учета фактической нагрузки на железнодорожное полотно, учета количества и массы проходящих поездов и т.п. Таким образом, использование волоконно-оптических датчиков – перспективная технология для построения системы управления движением поездов, применимая как при низких, так и при высоких скоростях сообщения». Однако в этих статьях отсутствует описание методов обработки сигнала с оптического сенсора.
В статье рассмотрены методы мониторинга железнодорожной инфраструктуры на основе сенсора оптического кабеля, а именно контроль за оползнеопасными (карстоопасными) участками, представляющими собой угрозу безопасности движения поездов на перегоне. Аппаратура контроля, в основе которой использован эффекта Рэлея, может решать и другие важные задачи. В частности, проведенные испытания показали, что система может быть ориентирована на определение количества колесных пар, местоположения и скорости состава. В статье не приводится сведений о математической модели обработки сигналов с сенсора оптического кабеля.
В статье исследуются особенности работы системы управления движением поездов по радиоканалу, связанные с обработкой информации в традиционных системах железнодорожной автоматики и телемеханики, и данных от бортового оборудования локомотивов. Описан процесс вычисления координат бортовым оборудованием и передачи его в центр радиоблокировки. Сопоставление двух источников информации в центре радиоблокировки позволяет осуществлять контроль работы бортовой системы позиционирования при проходе границы рельсовых цепей, что в дальнейшем дает возможность гарантировать работоспособность средств навигации на борту.
В статье изложен теоретический подход к решению задачи контроля целостности поездов бортовыми средствами. Проанализированы существующие подходы и технические решения по данному направлению. Делается вывод о контроле целостности поездов бортовыми средствами как перспективном направлении автоматизации перевозочного процесса. При этом предполагается перенос функций обеспечения безопасности движения с путевой аппаратуры ЖАТ (рельсовые цепи, системы счета осей) на локомотив и переход к принципам координатного регулирования движения поездов.
Ряд статей
, , , базируется на использовании технических решений компании Frauscher (Австрия), а именно распределенном акустическом зондировании (DAS). Компания Frauscher, являясь ведущим поставщиком технических решений на основе датчиков колес подвижного состава, последние пять лет также занимается инновационными технологиями в этой сфере. В статьях указывается, что использование одномодового оптического кабеля в качестве распределенного сенсора позволяет получить информацию о местоположении поезда, направлении движения, скорости, расстоянии между поездами, изломе рельса, ползуне, сходе камней, несанкционированном доступе, вандализме и других событиях. Однако, в статьях не затрагиваются вопросы построения математических моделей обработки. В статье ставиться задача разработки отечественных программных приложений для систем контроля железнодорожной инфраструктуры.В статье представлена информация о распределенной виброакустической системе «Дунай» разработки и производства ООО «Т8 Сенсор», принцип работы которой заключается в зондировании проложенного вдоль пути оптического волокна серией лазерных импульсов и анализе полученного отраженного от его стенок и микровкраплений в них сигнала. Показано, что применение системы «Дунай» позволяет эффективно решать вопросы не только мониторинга охранной зоны вдоль путей в целях своевременного обнаружения чрезвычайных происшествий, но и повышения пропускной способности участков за счет более точного позиционирования поездов.
Широкое применение получил распределенный сенсор ОК в системах охраны периметра. Однако, задачи, решаемые с помощью анализа сигналов с распределенного сенсора, направлены на обнаружение вторжения и используют интерферометры в качестве приборов регистрации спекла, возникающего в результате пересечения сенсора ОК сторонними объектами. Причем, периметр охраняемых участков ограничен и не находится вблизи значительных источников сигнала, таких как автомобильные дороги или пешеходные тротуары. В статье рассмотрены принципы построения систем охраны периметра и обработки сигналов с выдачей сигнала тревоги в случае вторжения нарушителя. Нейронная сеть, состоящая из входного слоя, скрытого слоя и выходного слоя, обучалась на проникновение человека, группы людей и проезд машины.
В статье приведена реализация системы контроля за движением автомобилей по трассе к городу Саратову, рассматривается решение задачи распознавания с помощью нейронных сетей сигналов от автомобилей, оказывающих воздействие на распределенный оптоакустический датчик. Также описываются характеристики формируемых сигналов и их предварительная обработка, выполняется выбор архитектуры нейронной сети для распознавания сигналов (в распределенном сенсоре ОК) от проезжающих автомобилей на основе его анализа и приводится обоснование этого выбора.
В статье рассматривается применение расширенного фильтра Калмана для оценки траектории движения тягового подвижного состава с учетом характерных для его движения особенностей. Приводятся примеры траектории движения, построенные по данным навигационной аппаратуры потребителей глобальных навигационных спутниковых систем, а также полученные в результате работы фильтра Калмана и делается их сравнение.
Сигнал, поступающий с оптического сенсора содержит достаточно много информации. Использование этой информации позволит по-новому решить сложные вопросы оценки состояния движущихся объектов по инфраструктуре. Так, одним из наиболее значимым является вопрос определения целостности состава, движущегося на инфраструктуре, и его локации.
Известно, что целостность состава определяется с использованием точечных датчиков, устанавливаемых на пути. Зная число вагонов, рассчитывается число срабатываний датчика, тем самым подтверждая, что разрыва состава не произошло. В работах , , , проведен анализ различных способов контроля местоположения подвижного состава и его целостности, включая точечные датчики, срабатывающие при проезде колесных пар. Делается вывод о целесообразности контроля точечными датчиками на подходах к станциям. Однако задача определения целостности состава приобретает большую актуальность в связи с реализацией высокоскоростного движения. Это связано, прежде всего, с переходом на технологию управления с подвижными блок-участками, когда тормозной путь рассчитывается на контроллере локомотива с учетом сложившейся ситуации впереди поезда (необходимо проводить проверку целостности впереди идущего состава). С этой точки зрения контроль целостности состава приобретает особую значимость. Точечные датчики дают информацию о состоянии состава в месте их локации. Как правило, они устанавливаются на входе/выходе станции. Частая установка точечных датчиков на инфраструктуре сопряжена со значительными финансовыми затратами, а также необходимостью технического обслуживания и проверки их работоспособности. Заложенные в точечных датчиках функции направлены на определение счета осей, не позволяют определять целостность состава на удаленных участках инфраструктуры, а также контролировать этот параметр в реальные моменты времени. Для управления в высокоскоростном движении необходимо не только знать где находится состав, но и оценивать состояние инфраструктуры впереди, на большом расстоянии от идущего поезда. Эта задача может быть возложена на сенсор оптический кабель, расположенный вдоль железнодорожной инфраструктуры. Достоинством этого подхода является его способность анализировать по возникающим шумам состояние впереди лежащей инфраструктуры на большом расстоянии, независимо от времени суток, состояния погоды и других факторов.
Необходимо отметить, что частота опроса сенсора позволяет с достаточной точностью определять местоположение состава, конкурируя с инерциальными системами, тем более с системами спутниковой навигации, подверженным влиянию систем радиоэлектронной борьбы.
Переход к использованию высокоскоростного транспорта требует совершенно иного построения системы управления движением, где не будет использоваться рельсовая цепь в качестве основного датчика определения местоположения поезда, поскольку целью является выполнение функции контроля целостности рельсов, что является важным в обеспечении безопасности.
На основании проведенного обзора исследований можно констатировать, что вопросам обработки сигналов с ОК уделялось недостаточно внимания. При обработке сигналов с ОК возникают вопросы слежения за объектами в момент их встречи на перегоне (встречное движение составов в четном и нечетном направлениях), слежение за объектами в момент нахождения в одной точке двигающихся объектов на инфраструктуре (подвижной состав и человек или группа людей).
Технические возможности систем, реализованных с распределенным сенсорным датчиком, возможно использовать в двух направлениях:
– контроль на инфраструктуре за движением персонала и вторжением посторонних объектов;
– использование данных с распределенного сенсора для систем управления движением.
Использование информации с распределенного сенсора для систем управления движением ставит задачи, связанные с разработкой
– методов, направленных на идентификацию типов объектов, находящихся или двигающихся по инфраструктуре;
– методов обработки сигналов распределенного сенсора, направленных на получение координат движения объектов (составов, людей машин и других объектов) по инфраструктуре;
– методов контроля за движущимися объектами, обеспечивающими отслеживание траектории движения подвижного состава и его целостность.
Направление использования распределенного сенсора для контроля вторжения или движения персонала по инфраструктуре определяет актуальную задачу – разработку методов, направленных на идентификацию движения на фоне проезжающего подвижного состава.
Задачи идентификации объектов (подвижного состава, машин, людей, животных) предполагает проведение фильтрации сигнала. Мы не знаем реальную амплитуду полезного сигнала и помех (помехи определяются неоднородностью в оптическом кабеле, нарушением технических условий прокладки сенсора по инфраструктуре), в связи с этим для ….. эффективно применить метод фильтрации Калмана. Фильтр Калмана работает в предположении нормального распределения помехи и сигнала. Фильтра Калмана работает с амплитудой сигнала и помехи, а расстояние до объекта задается техническими параметрами рефлектора. При этом мы рассматриваем возможное отклонение по значению производной между предыдущим и текущим значением и определяем возможное максимальное отклонение сигнала от математического ожидания. Модель фильтра Калмана воздействует на конкретную величину сигнала (имеется ввиду сигнал от определенного объекта) с учетом всего объема информации сигналов и помех, действующих в сенсоре на всем протяжении его укладки.
Цель исследования состоит из нескольких задач. Первая – построение модели распознавания объектов движение на инфраструктуре на основе нейронной сети, где в качестве одного из фильтров выступает фильтр Калмана. Вторая – определение параметров подвижного состава, целостность и количество колесных пар в составе.
3. Выделение полезного сигнала на основе адаптивной модели фильтра Калмана
В адаптивной модели фильтра Калмана раскрытие неопределённости о параметрах распределения случайной зашумляющей помехи в результатах измерений не предполагает выделения полезной составляющей сигнала, поэтому модель состояний должна быть ориентирована на воспроизведение контролируемого процесса (полезная составляющая плюс шум) без учёта его особенностей, возникающих в связи с физическими принципами реализации чувствительного элемента (неоднородность волокна и нарушение технических условий прокладки сенсора по инфраструктуре) . Учитывая это, модель состояний может быть представлена следующим образом , , :
Фазовый вектор дифференциальные уравнения
В модели состояний x1 – начальное значение фильтруемого сигнала, равное измеренному значению y, x2 – производная фазовой переменной x1, изменяющаяся под воздействием входного возмущения, параметры которого должны определяться в процессе адаптивной фильтрации измерительных данных. Здесь и
– значения измеряемого сигнала в моменты tk и tk-1.
Переходные матрицы состояний F и возмущений G для дискретной расчётной схемы задаются следующими выражениями:
где – есть интервал дискретизации временных отсчётов.
Модель состояний в матричной форме может быть представлена следующим образом:
где dwk-1 – винеровская случайная составляющая с априорно неизвестными параметрами распределения.
Модель измерений имеет вид , , :
где vk – гауссовская случайная последовательность с нулевым средним M[v]=0 и априорно неизвестной дисперсией σ2v,h, характеризующими плотность распределения вероятностей. Представленные модели состояний и измерений используются для определения дисперсии σ2v,h случайной помехи ι в результатах измерений контролируемого процесса.
Такая оценка дисперсии σ2v,h представляется в качестве нового информационного признака, который присутствует в результатах измерений, но непосредственно не измеряется, а определяется в качестве оценки в результате адаптивной фильтрации.
Далее производится выделение полезного сигнала из зашумлённых результатов измерений от чувствительного элемента сенсора. При этом, выделение полезного сигнала из зашумлённых результатов измерений рассматривается без учёта физических принципов функционирования чувствительного элемента – наиболее общий случай при нарушениях режимов функционирования чувствительного элемента, обусловленных нарушением технических условий прокладки сенсора, а также неоднородностью структуры волокна оптического кабеля.
В этом случае в полной мере применимы ранее рассмотренные модели состояний (2) и измерений (3, 4) без каких-либо изменений, но при условии, что в отношении действующей помехи ι в результатах измерений контролируемого процесса неопределённость раскрыта, то есть получены оценки дисперсии помехи σ2v,h на каждый момент времени регистрации данных.
Таким образом, реализованные математические модели состояний и измерений, положенные в основу предварительной обработки сигнала (фильтрации) от распределенного сенсора, обеспечили раскрытие неопределённости дисперсии случайной помехи и полезного сигнала в результатах измерений.
Полученные результаты предварительной обработки оценки сигналов от распределенного сенсора использованы в качестве исходных в моделях обработки искусственной нейронной сетью.
4. Идентификация объектов движения по железнодорожной инфраструктуре на основе сверточной нейронной сети
Получив очищенные от помех данные, ставится задача определения объекта и его параметров на железнодорожной инфраструктуре. В нейронной сети применим входные фильтры. На первом этапе входные фильтры осуществляют процесс фильтрации на основе модели Калмана. В качестве изменяемого параметра принимаем σ2v,k. Для этого в управление входными фильтрами FLj, реализующими модель Калмана, включаем коэффициент связи wj для каждого фильтра wj×FLj, который рассчитывается по методу обратного распространения ошибки. Это позволит расширить исходные данные, полученные с различными σ2v,k, и выбрать те, которые повышают точность распознавания.
Объекты на инфраструктуре располагаются в разных ее частях, в результате колебания передаются на распределенный сенсор. В этой связи ставится задача определения принадлежности фиксируемого рефлектометром сигнала объекту, от которого возникли колебания почвы, зарегистрированные на сенсоре.
Это позволяет в дальнейшем обрабатывать нейронной сетью сигналы, принадлежащие конкретному объекту, и нет необходимости обрабатывать сигналы по всей длине сенсора, поскольку объект локализован, то есть определено его местоположение.
Оценка параметров объекта подвижного состава на инфраструктуре предполагает определение целостности и определения колесных пар в движущемся составе. Для обучения моделей использовался массив обучения, содержащий большой объем информации о движении подвижного состава, данные о нахождении обслуживающего персонала и других подвижных средств, осуществлявших движение по железнодорожной инфраструктуре.
Процесс получения решения с использованием нейронной сети для каждого варианта реализации состоит из этапов обучения (на обучающей выборке) и проверки (на проверочной выборке). Решение поставленной задачи осуществлялось с использованием сверточной нейронной сети (СНС) , , . Расчет значений коэффициентов связей на каждом слое СНС производился методом обратного распространения ошибки.
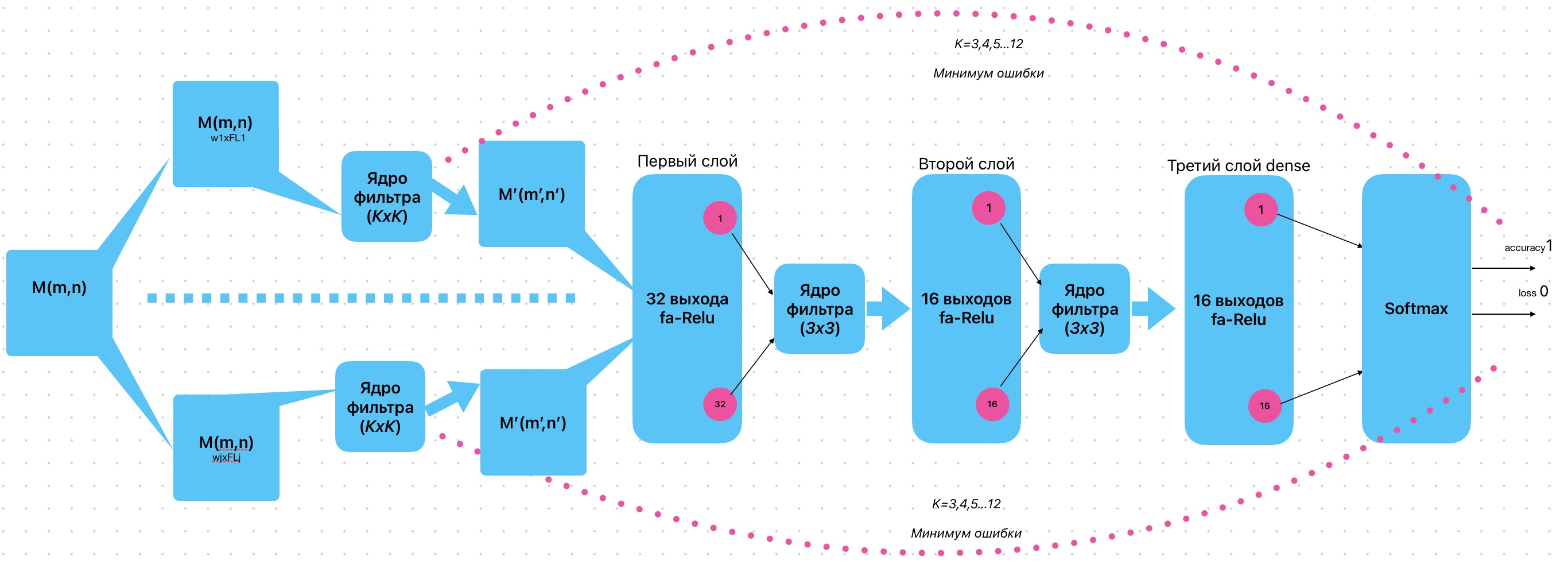
Рисунок 2 - Структура поиска размера фильтра (k×k) в сверточной нейронной сети
– приводим массив к ширине в k пикселей (k численных значений);
– из полученных данных выделяем квадраты размером (k×k) пикселей, с каждой итерацией спускаясь вниз на один пиксель (на одну строку массива);
– создаем новый массив, каждый элемент которого равняется сумме ячеек для каждого выделенного квадрата;
– выделяем из полученного массива сумм максимум и делим на него каждый элемент данного массива;
– относительно порогового значения – 0.38 (определенного в результате вычислительных экспериментов) присваиваем каждому элементу этого массива новое значение; если значение меньше выбранного порогового значения, ему присваивается 0, если больше либо равно – присваивается 1 (получаем массив флагов меток);
– ранее указанные данные входят в первый слой нейронной сети conv2d, на вход которой поступают данные в виде квадратов (k×k) пикселей и массив флагов ;
– рассчитываются значения выходов СНС и определяется ошибка;
– минимальная ошибка была достигнута при k=10.
Для выбранного k=10 принято решение использовать нейронную сеть с двумя выходами. Первый выход обозначает наличие колеса подвижного состава, второй отсутствие. В качестве функции выходного слоя используется функция softmax Функция softmax, также известная как softargmax или нормализованная экспоненциальная функция, преобразует вектор из n действительных чисел в распределение вероятностей n возможных исходов. Это обобщение логистической функции на множество измерений и используется в многочленной логистической регрессии. Функция softmax используется в качестве последней функции активации нейронной сети для приведения выходных данных сети к распределению вероятностей по прогнозируемым выходным классам. Стандартная (единичная) функция softmax σ определяется по формуле (5):
где z – вещественные числа.
Модель нейронной сети имеет четыре слоя. Первый сверточный входной слой получает на вход данные в формате квадратной матрицы (изображений) размером (k×k), с функцией активации relu и 32-мя нейронами на выходе . Свертка в промежуточных слоях происходит с помощью матрицы 3х3. Второй сверточный слой имеет похожую структуру за исключением количества нейронов на выходе 16. Третий слой устанавливает взаимосвязи между сверточным слоем, рассмотренным выше, и выходным слоем densе. Выходной слой dense имеет два нейрона на выходе, имеющих за бинарный выход {0, 1} и выходную функцию softmax, которая обеспечивает более четкую картину на выходе за счет своей математической структуры. Выход нейросети имеет структуру, приближенную к бинарной, значения на выходе стремятся либо к 0 либо к 1. Для того, чтобы в дальнейшем работать с выходами нейронной сети, необходимо привести выход к четкому бинарному виду {0, 1}. Для этой задачи были разработаны функции decode_output_neurone. С целью удаления лишних нулевых значений выходов нейросети (фоновый шум не является сигналом от подвижного состава), с начала и с конца массива была реализована модель и разработанная на ее основе функция cut_binnary. Визуализациия бинарной последовательности на графике осуществлялись функцией graphics, в задачу которой входило:
– нахождение среднего арифметического значения входных данных для каждого отрезка времени;
– нахождение максимального среднего арифметического;
– деление каждого среднего арифметического на максимальное 255.
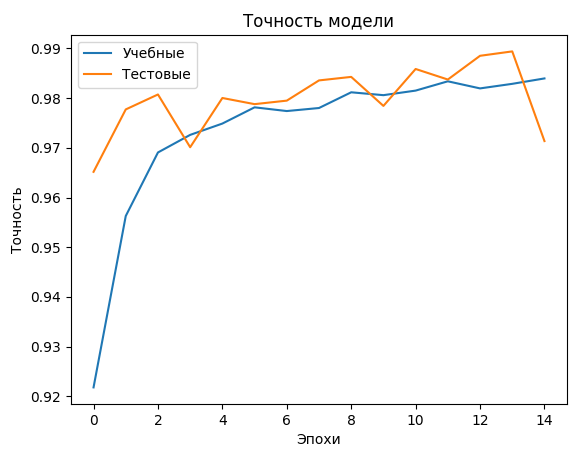
Рисунок 3 - Результаты моделирования СНС
Примечание: первый вариант модели
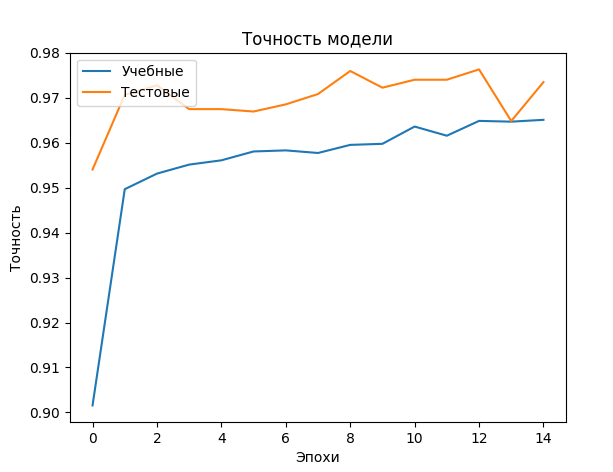
Рисунок 4 - Результаты моделирования СНС
В результате, выбранный вариант построения сверточной нейронной сети, представленный ниже, имеет следующую структуру. Первый слой – 32 нейрона, размер считывающей сетки 3х3, функция активации relu, размер входной ячейки 10х10х1. Второй слой – 16 нейронов, размер считывающей сетки 3х3, функция активации relu. Выходной слой – два нейрона, выходная функция softmax.
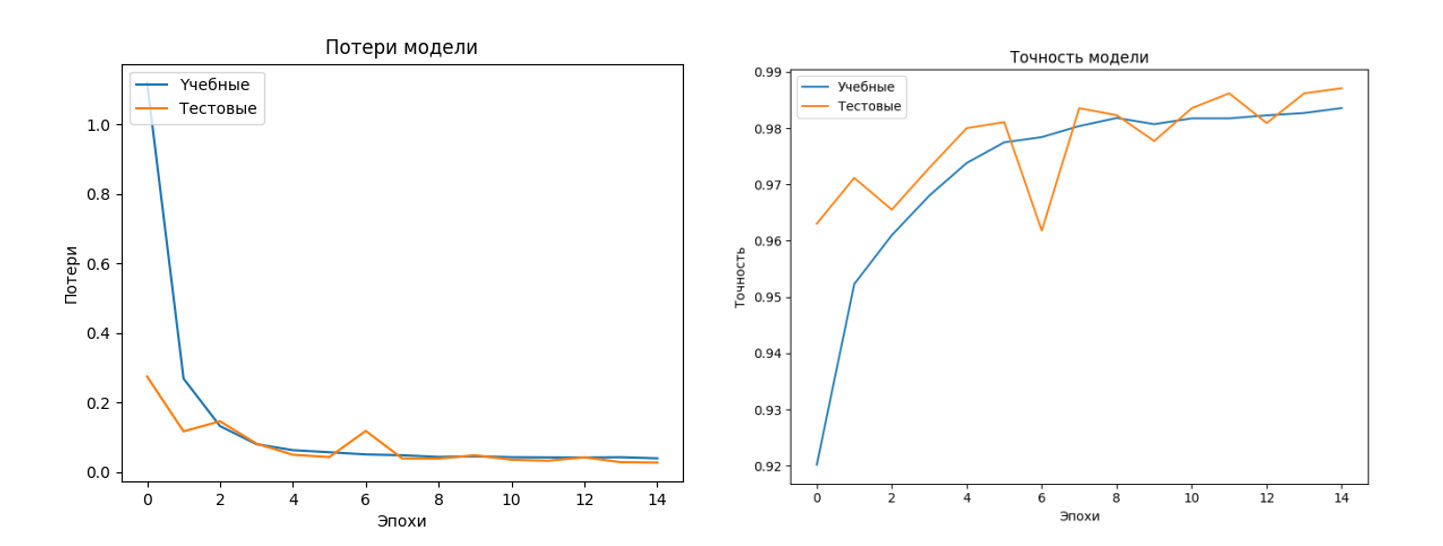
Рисунок 5 - Результаты моделирования СНС
Примечание: итоговый вариант модели

Рисунок 6 - Результаты после обработки сверточной нейронной сетью
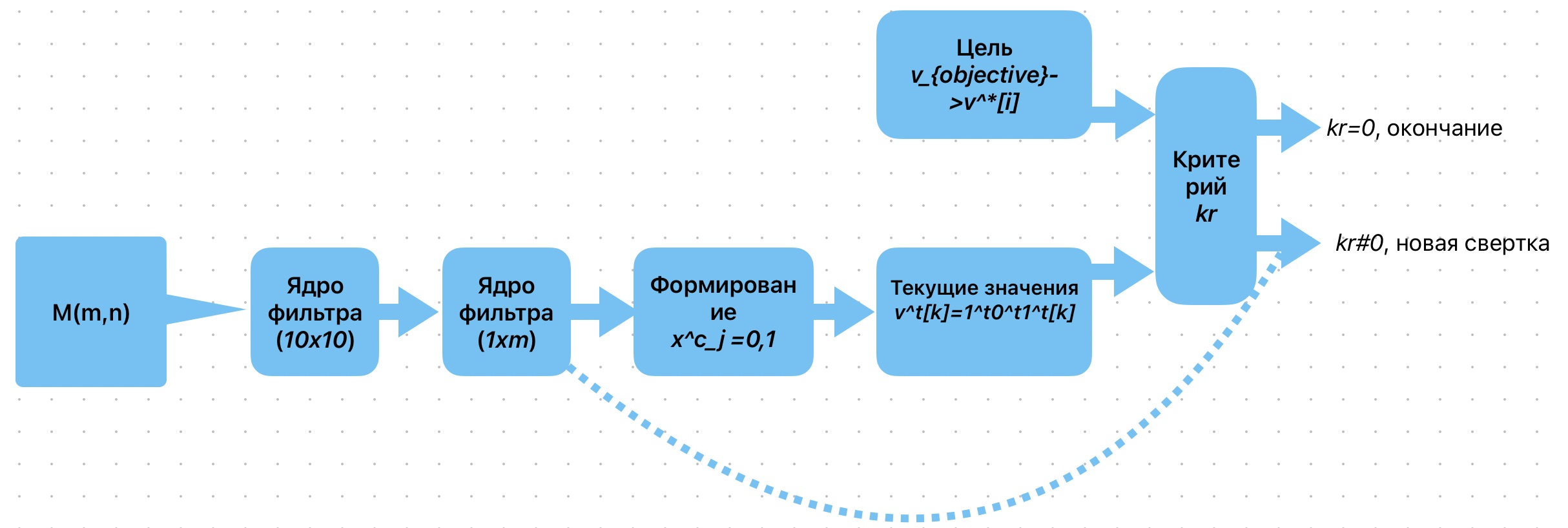
Рисунок 7 - Структура нейронной сети с логическим критерием
где последовательность 1,0,1 соответствует вагону, 0 в начале и конце последовательности означает начало и конец поезда соответственно.
Обозначим последовательность, соответствующую вагону, через v*=(1*,0*,1*), где 1*=111... последовательность единиц, являющихся признаками шума под колесными парами. Рефлектометр производит измерения с большой частотой. Следовательно, расстояние, которое проходит состав за время между измерениями, небольшое. Поэтому сигнал шума фиксируется на последовательности полученных данных несколько раз. Применив операцию конъюнкции, получаем единицу. Символ (1*) означает операцию приведения всей последовательности логических единиц к одной. Аналогично поступим с обозначением малых шумов между колесными парами через логический 0*=0|0|..., где | – знак дизъюнкции. Исходя из принятых обозначений, цель objective принимает вид:
где i – количество вагонов в составе, v*(1*,0*,1*), а v*[i] – матрица, характеризующая цель (6), состоящую из массива повторяющихся значений v*.
Далее используем классический алгоритм свертки с фильтром. Для первой свертки полоса из нескольких участков преобразовывается в полосу толщиной в одно значение, так как для подсчета количества колесных пар это наиболее удобный формат. На первом преобразовании используем фильтр n×n с целью перехода к матрице столбцу [xi,j], (i=1,j), где n=10 – количество исследуемых участков. Каждое значение после свертки представляет среднее значение, вычисляемое по формуле:
где с – индекс свертки. Это означает, что в каждом квадрате n×n находилось среднее арифметическое.
Далее производились последующие свертки с фильтрами 1×m, где m – произвольное число участков данных [xi,j], (i=1,j); m<j, которые усредняются по формуле (7), с той лишь разницей, что n заменяем на m. После каждой свертки производилась обработка данных по следующей модели:
Этот процесс, описываемый формулой (9), необходим для предотвращения размытия границ колесных пар. Из xcj формируется последовательность нулей и единиц в текущий массив vt[k]. Индекс t означает текущее значение последовательности, полученной после свертки. Массив vt[k] можем записать приняв xcj=[0,1] → at, тогда массив vt[k]=(at,at,at) [k], где a – сформированные из xcj=[0,1] значения нулей и единиц согласно формуле (8).
Данные свертки уменьшают расстояния между участками с высокой амплитудой шума, издаваемой проходящими колесами поезда и участками с относительно невысокой амплитудой шума при проезде вагона. После некоторого числа однотипных сверток нули в последовательности vt[k] между колесными парами вагонов поглощались единицами. Это являлось признаком для определения колесных пар и позволило отделить количество колесных пар одного вагона. Для определения количества вагонов в составе использовался критерий сравнения цели – матрица v*[k] (8) и текущего массива vt[k] после каждой свертки:
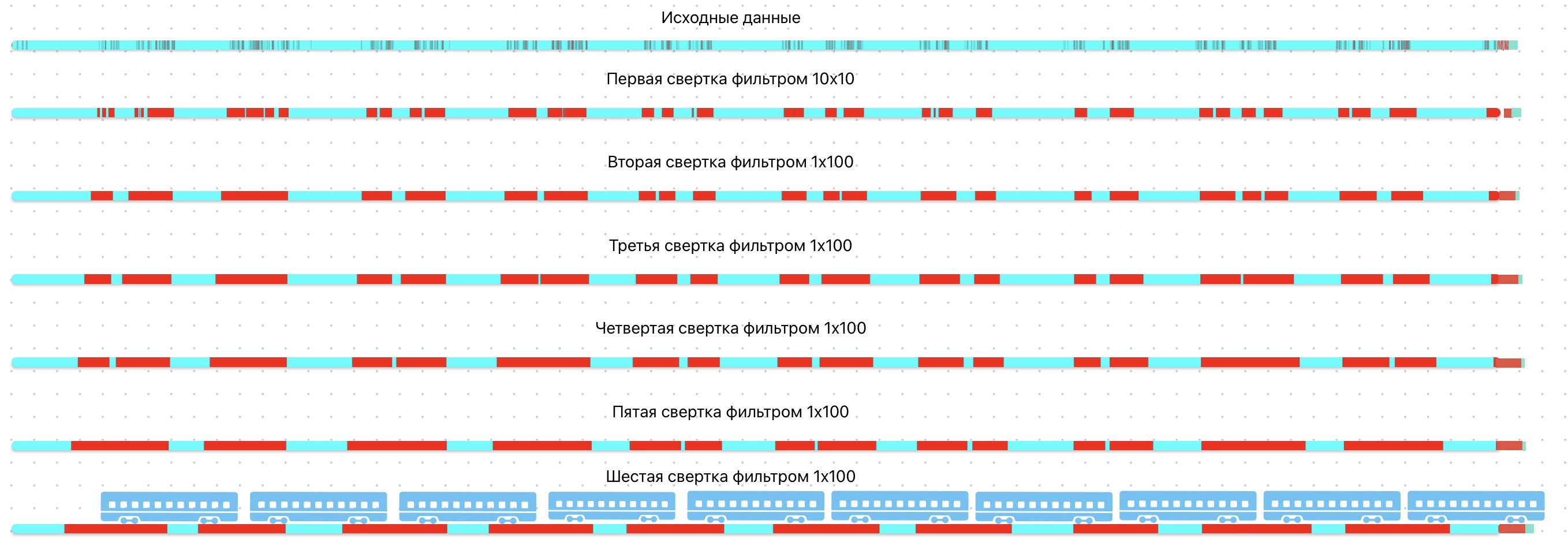
Рисунок 8 - Результаты обработки сигнала нейронной сетью с логическим критерием
5. Заключение
Таким образом, на основании вышеизложенного можно сделать следующие выводы:
– в статье рассмотрено решение задачи выделения полезного сигнала на основе адаптивной модели фильтра Калмана;
– разработаны модели идентификация объектов движения по железнодорожной инфраструктуре на основе сверточной нейронной сети с определением типа подвижного состава и его целостности;
– реализована модель нейронной сети, построенная с применением логического критерия, позволяющая определять количество вагонов в составе.
В дальнейшем исследования в области использования распределенного сенсора – оптического кабеля должны быть направлены на создание моделей распознавания вторжения на железнодорожную структуру посторонних объектов, а также диагностических моделей непрерывного контроля ходовых характеристик подвижного состава на всем пути движения подвижного состава по путевой инфраструктуре и определения его местоположения при отсутствии сигнала ГЛОНАСС.