РАЗРАБОТКА ИНФОРМАЦИОННОЙ СИСТЕМЫ ВИЗУАЛИЗАЦИИ УПРАВЛЕНИЯ МЕХАТРОННЫМ МОДУЛЕМ

РАЗРАБОТКА ИНФОРМАЦИОННОЙ СИСТЕМЫ ВИЗУАЛИЗАЦИИ УПРАВЛЕНИЯ МЕХАТРОННЫМ МОДУЛЕМ
Научная статья
Ермаков С.Р.1, *, Пустошилов Д.В.2, Рыжанов М.В.3
1, 2, 3 РТУ МИРЭА, Москва, Россия
* Корреспондирующий автор (sergen355[at]gmail.com)
АннотацияВ данной статье рассматриваются новейшие методы и практические реализации визуализации системы управления мехатронным модулем привода технологического оборудования. Эффективность визуализации обусловлена особенностями пользователя, позволяющими лучше воспринимать, быстрее запоминать и легче воспроизводить образную информацию. Обучение, мониторинг, администрирование, организация работ — на любом из этапов цикла управления использование визуальных инструментов с использованием современных технологий позволяет оптимизировать производство. Каждый из этапов может быть потенцирован с помощью визуализации процессов и метрик. При разработке данной визуализации управления мехатронным модулем учитывается важность представления пользовательского интерфейса и удобность его использования.
Ключевые слова: визуализация, мехатронный модуль, система управления, технологическое оборудование, цифровой двойник.
DEVELOPMENT OF INFORMATION SYSTEM FOR VISUALIZATION OF MECHATRONIC MODULE CONTROL
Research article
Ermakov S.R.1, *, Pustoshilov D.V.2, Ryzhanov M.V.3
1, 2, 3 MIREA – Russian Technological University, Moscow, Russia
*Corresponding author (sergen355[at]gmail.com)
AbstractThis paper discusses the latest methods and practical implementations of the visualization of the control system for the mechatronic drive module of technological equipment. The effectiveness of visualization is due to the features of a user, allowing one to perceive better, remember faster, and reproduce figurative information easier. Training, monitoring, administration, organization of work are possible at any stage of the management cycle. The use of visual tools with modern technologies allows us to optimize production. Each of the steps can be potentiated by visualizing processes and metrics. When developing this visualization of mechatronic module control, the importance of user interface presentation, and the convenience of its use must be taken into account.
Keywords: visualization, mechatronic module, control system, technological equipment, digital double.
ВведениеГлобальные изменения в мировых производственных процессах создают запрос на исследования и углубление познания в областях производственной и промышленной информатики. Новые технологии, которые появляются в рамках концепции «Industry 4.0», позволяют провести дополнительные научные изыскания и внедрить новейшие разработки в производственные процессы. Среди этих технологий — цифровые двойники. Согласно исследованиям Gartner, уже к 2021 году 50% крупных производственных компаний будут использовать концепцию цифровых двойников [1].
Объектом данного исследования является концепция цифровых двойников в визуализации управления, а предметом — визуализация для системы управления цифровым двойником мехатронного модуля привода технологического оборудования. Реализация концепции цифрового двойника актуальна при наличии связующих звеньев — необходимое внимание в исследовании уделено проектированию и реализации визуализации системы управления между субъектом взаимодействия (человеком или искусственным интеллектом) и объектом (цифровым двойником).
Цель и задачи
Цель исследования: визуализация системы управления мехатронным модулем привода технологического оборудования. Задачи, при помощи которых достигается эта цель:
- проектирование концептуальную архитектуры (модели);
- практическая реализация визуализации управления мехатронным модулем;
- практическая реализация визуализации цифрового двойника.
Используемые программно-технические средства
В ходе исследования используются программное обеспечение КОМПАС-3D Home и SimInTech [2].
Проектирование
Цифровой двойник является не только представлением реального объекта в виртуальном мире, который упрощает взаимодействие с физической сущностью, но и является инструментом доступа к физическому объекту или его виртуальной копии. В этой связи исключительно важно обеспечить целостность передачи информации с помощью определенной структуры [3].
Концептуальная система связи моделей и пользовательского интерфейса показана на Рис. 1.
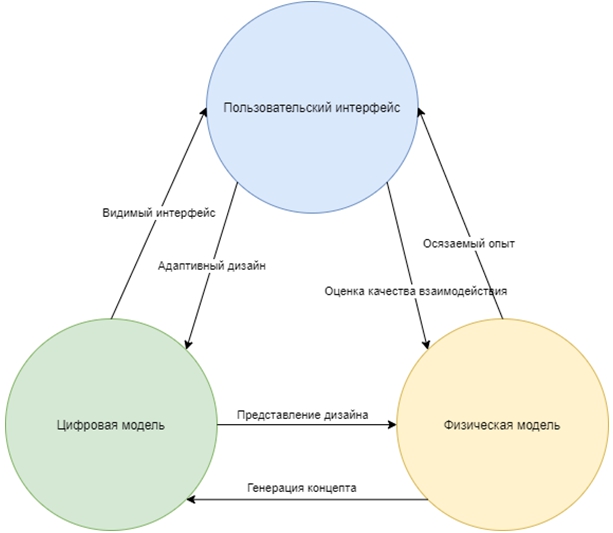
Рис. 1 – Концептуальная основа процесса разработки ЦД
Концепция состоит из трех модулей: физического, цифрового и пользовательского интерфейса. Физический модуль означает физические продукты и услуги, цифровой модуль означает ресурсы виртуального совместного проектирования. Система конфигурации продукта, а также модуль пользовательского интерфейса обозначает когнитивное и аффективное поведение пользователя (например, посредством обратной связи, тестированием визуализации и внесения предложений) в процессе разработки продукта.
На Рис. 2 показаны системные процессы функционирования визуализации и управления им с учётом особенностей концептуальной системы.
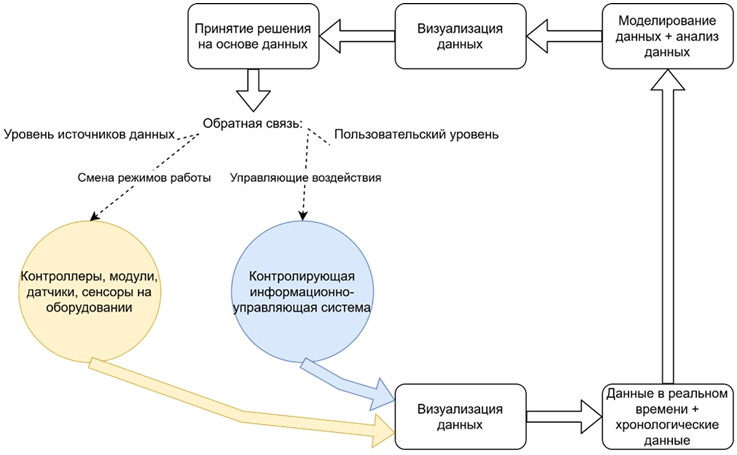
Рис. 2 – Процессы функционирования визуализации цифрового двойника
Важнейшим аспектом применения цифрового двойника является возможность дистанционной обработки, анализа и управления данными через информационную систему визуализации. Например, поступающая в цифровой двойник информация позволяет в том числе дистанционно управлять всем процессом удалённо, что повышает эффективность, доступность, оперативность и прозрачность функционирования [4].
Структура цифрового двойника (подсистема визуализации)
В общем виде структуру можно рассмотреть, как состоящую из следующих уровней: кибер-физический уровень, уровень первичной обработки и хранения данных, распределенный уровень вычислений и хранения, уровень моделей и алгоритмов и уровень визуализации и пользовательских интерфейсов (Рис. 3).
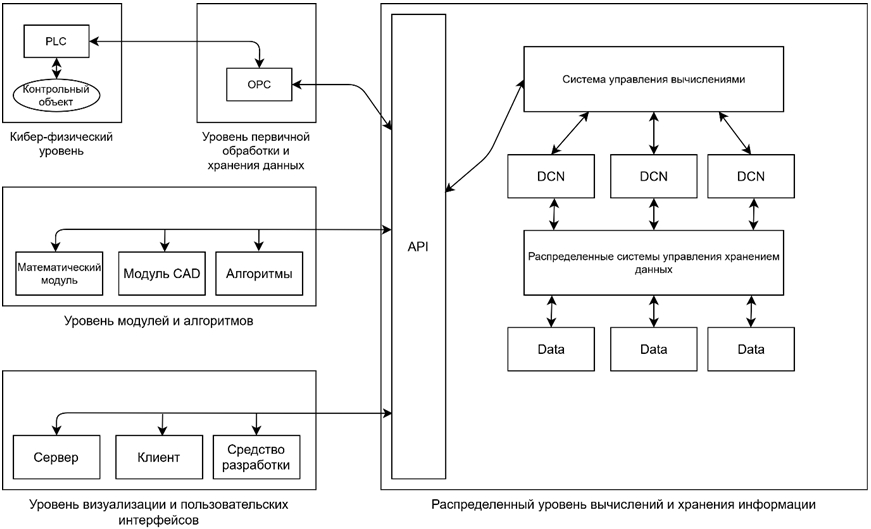
Рис. 3 – Структура цифрового двойника
Безопасность цифрового двойника закладывается в проектирование – это один из самых важных аспектов стабильного функционирования информационной системы. Также необходимо учесть все возможные сценарии использования, обмена и моделирования визуальных данных.
Практическая реализация визуализации
Поскольку цифровой двойник является виртуальным объектом, который в перспективе отображает все перемещения в пространстве и свойства объекта физического, он имеет свойство менять положения объектов и элементов, которым заданы параметры передвижения. Это свойство достигается с помощью интеграции модулей управления мехатронным модулем в оболочку цифрового двойника [5].
Общая структура интеграции и взаимодействия в информационной системе строится на разработанной модели взаимодействия. В этой модели модуль визуализации управления делится на следующие второстепенные модули, которые являются связанной системой управления:
- Сигналы из визуализированной панели управления. В этом модуле управления принимаются сигналы, обрабатываются и передаются для использования в механизме цифрового двойника. При наличии физического программируемого логического контроллера возможен ввод сигналов с него.
- Механизм. Исполнительный механизм, в который встроен интегратор. Интегратор применяет обработанный сигнал для вычисления основных законов движения мехатронного модуля [6].
- Обработчик. В этом модуле происходит решение задачи движения мехатронного модуля и моделей, которые связаны с ним.
- Графическое представление. В этом модуле сигналы, обработанные при помощи предыдущих модулей, поступают для представления графиков. Пользователь может открыть нужный ему график[7].
Непосредственно в самой системе визуализации управления реализованы следующие возможности:
- титульные строки информации;
- представление кнопок на экране;
- захват клавиш ввода клавиатуры;
- окно визуализации управления в программном обеспечении.
Также в системе визуализации реализованы отчетные датчики о местоположении мехатронного модуля. Этот разрабатываемый элемент графически представляет датчики нескольких типов. Значения датчика могут меняться в некотором диапазоне. При создании каждого элемента типа «Датчик» указывается необходимое уникальное значение и имя элемента. У датчиков есть возможные минимальные и максимальные значения. Дополнительно указываются координаты датчиков в окне визуализации, их необходимые параметры.
Датчики являются визуализированным виртуальным представлением, которое показывает информацию об идеальном движении мехатронного модуля.
Окно датчиков входит в единую визуальную систему управления. Данное окно помогает оператору или пользователю визуальной системы управления принимать необходимые решения для управления мехатронным модулем [8].
Визуализация управления в программном обеспечении SimInTech представлена на Рис. 4.
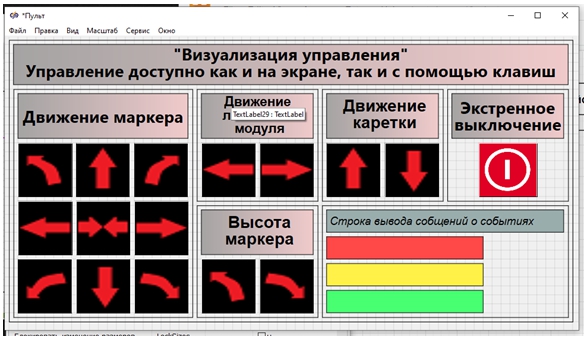
Рис. 4 – Визуализация управления цифровым двойником
Визуализация цифрового двойника мехатронного модуля представляет собой 3D-модель, которая содержит в себе несколько дата-элементов (STL-модели). Визуализация цифрового двойника представлена на Рис. 5.
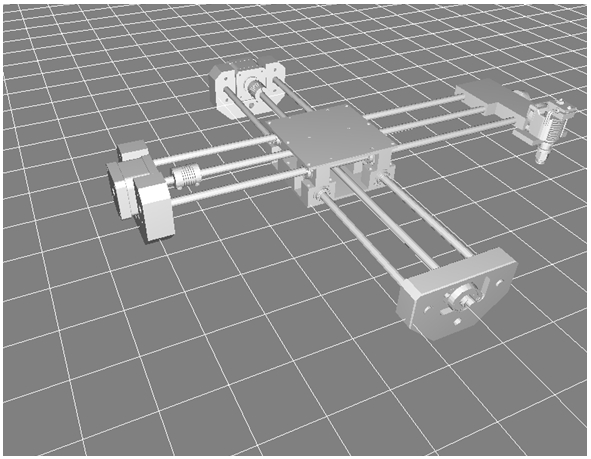
Рис. 5 — Визуализация цифрового двойника
Реализация графика движения (визуализации координат модуля)
В SimInTech графический модуль «График» является упрощенным вариантом стандартных блоков «Временной график» и «График Y от X» и применяется для наглядного представления значений сигналов и их изменений во времени. Элемент может работать в режиме графика и в режиме гистограммы [9].
Очень важное значение для пользователя информационной системы управления играют отчетные графики. Они позволяют наглядно увидеть движение мехатронного модуля и основные показатели его параметров. Реализация графика движения представлена на Рис. 6.
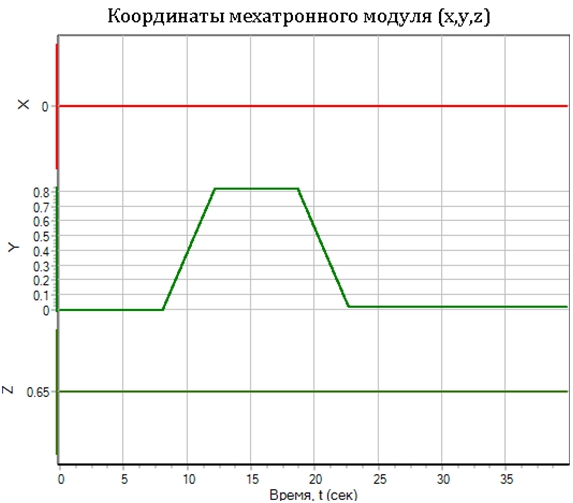
Рис. 6 – Графическое представление координат мехатронного модуля
Основные результаты
При визуализации управления цифровым двойником мехатронного модуля учитывается важность представления пользовательского интерфейса и удобность его использования. Клавиши захватываются при помощи дополнительных скрытых элементов — происходит захват стрелочных клавиш вверх, вниз, влево, вправо в окне визуализации управления. Окно визуального управления разработано для возможности интерпретации различных сигналов непосредственно пользователем. Визуализация цифрового двойника позволяет в режиме реального времени отслеживать воздействие управляющих сигналов на цифровой двойник [10].
Также в системе визуализации реализованы отчетные датчики о местоположении мехатронного модуля. Этот разработанный элемент графически представляет датчики нескольких типов.
Заключение
В ходе исследования показано, что путем применения основных тенденций в области концепций «Industry 4.0» и цифровых двойников возможна реализация данных концепций для визуализации мехатронного модуля и его системы управления. Данная концепция и цифровые двойники являются выгодной и перспективной тенденцией в векторе развития промышленности.
При разработке визуализации был сделан ряд практических выводов, во многом подтверждающих теоретические наработки исследователей.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Ромашкова И. А. Реализация концепции «цифрового двойника» в российском производстве как этап перехода к четвертой промышленной революции / И. А Ромашкова, Т. Л. Лосаберидзе // Постулат. — 2018. — N 5. — С. 1–3.
- Калачёв Ю. Н. Моделирование в Электроприводе / Ю. Н. Калачёв. — 2019. — С. 4.
- Пономарев К. С. Цифровой двойник производства — средство цифровизации деятельности организации / К. С. Пономарев, А. Н. Феофанов, Т. Г. Гришина // Управление в социальных и экономических системах. — 2019. — С. 11–17.
- Zheng P. Smart manufacturing systems for Industry 4.0: Conceptual framework, scenarios, and future perspectives / P. Zheng, Z. Sang, R. Y. Zhong, X. Xu. — 2018. — Vol. 1. — N 1. — P. 1–5.
- Кокорев Д. С. Применение цифровых двойников в производственных процессах / Д. С. Кокорев, Н. П. Посмаков // Technical Science. — 2019. — N 50. — С. 38–45.
- Асанов Р. Э. Выбор мехатронных модулей по их технологическому уровню / Р. Э. Асанов, М. Г. Косов, А. П. Кузнецов // Известия высших учебных заведений. Поволжский регион. — 2017. — N 1. — С. 68–75.
- Жуков А. В. Мехатронный модуль малых перемещений / А. В. Жуков // Тольяттинский государственный университет, секция 3 «Электроника, электромеханические преобразователи и системы управления». — Тольятти: ТГУ, 2017. — С. 34–41.
- Калядин В. А., Стребулянин М. М. Модель мехатронного модуля с двумя степенями подвижности / В. А. Калядин, М. М. Стребулянин // Машиностроение. Расчет и конструирование машин. — 2017. — N 1. — С. 3–7.
- Иванов М. А. Разработка программного обеспечения для системы энергоэффективных мехатронных устройств с интеллектуальной системной управления / М. А. Иванов, А. О. Савельев, В. М Саклаков // Кибернетика и программирование. — 2017. — № 6. — С. 9–18. – URL: https://nbpublish.com/library_read_article.php?id=24574 (дата обращения: 18.06.2020)
- Бошляков А. А. Проектирование алгоритмического и программного обеспечения мехатронных систем/ А. А. Бошляков, С. B. Овсянников. — М., 2018. — 57 с.
Список литературы на английском языке / References in English
- Romashkova I. A. Realizacija koncepcii «cifrovogo dvojnika» v rossijskom proizvodstve kak jetap perehoda k chetvertoj promyshlennoj revoljucii [Implementation of the concept of “Digital Twin” in Russian production as a stage of transition to the Industry 4.0] / Romashkova I. A, Losaberidze T. L. // Postulat [Postulate]. — 2018. — N 5. — P. 1–3. [in Russian]
- Kalachjov Ju. N. Modelirovanie v Jelektroprivode. [Modeling in an electric drive] / Kalachjov Ju. N. — 2019. — P. 4. [in Russian]
- Ponomarev K. S. Cifrovoj dvojnik proizvodstva — sredstvo cifrovizacii dejatel'nosti organizacii [“Digital Twin” of production - a tool of digitalization of the organization's activities] / Ponomarev K. S., Feofanov A. N., Grishina T. G. // Upravlenie v social'nyh i jekonomicheskih sistemah [Management in social and economic systems]. — 2019. — P. 11–17. [in Russian]
- Zheng P. Smart manufacturing systems for Industry 4.0: Conceptual framework, scenarios, and future perspectives / Zheng P., Sang Z., Zhong R. Y., Xu X. — 2018. — Vol. 1. — N 1. — P. 1–5.
- Kokorev D. S. Primenenie cifrovyh dvojnikov v proizvodstvennyh processah [Application of digital duplicates in production processes] / Kokorev D. S., Posmakov N. P.// Technical Science. — 2019. — N 50. — P. 38–45. [in Russian]
- Asanov R. Je. Vybor mehatronnyh modulej po ih tehnologicheskomu urovnju [Selection of mechatronic modules by their technological level] / Asanov R. Je., Kosov M. G., Kuznecov A. P. // Izvestija vysshih uchebnyh zavedenij. Povolzhskij region [News of higher educational institutions. Volga region]. — 2017. — N 1. — P. 68–75. [in Russian]
- Zhukov A. V. Mehatronnyj modul' malyh peremeshhenij [Mechatronic module of small movements] / Zhukov A. V. // Tol'jattinskij gosudarstvennyj universitet, sekcija 3 «Jelektronika, jelektromehanicheskie preobrazovateli i sistemy upravlenija» [Tolyatti state University, section 3 “Electronics, Electromechanical converters and control systems”]. — Tol'jatti: TGU, 2017. — P. 34–41. [in Russian]
- Kaljadin V. A. Model' mehatronnogo modulja s dvumja stepenjami podvizhnosti [Model of a mechatronic module with two degrees of mobility] / Kaljadin V. A., Strebuljanin M. M.// Mashinostroenie. Raschet i konstruirovanie mashin [Engineering. Calculation and design of machines]. — 2017. — N 1. — P. 3–7. [in Russian]
- Ivanov M. A. Razrabotka programmnogo obespechenija dlja sistemy jenergojeffektivnyh mehatronnyh ustrojstv s intellektual'noj sistemnoj upravlenija [Software development for a system of energy-efficient mechatronic devices with intelligent system control] / Ivanov M. A., Savel'ev A. O., Saklakov V. M. // Kibernetika i programmirovanie [Cybernetics and programming]. — 2017. — № 6. — P. 9–18. URL: https://nbpublish.com/library_read_article.php?id=24574 (accessed: 18.06.2020) [in Russian]
- Boshljakov A. A. Proektirovanie algoritmicheskogo i programmnogo obespechenija mehatronnyh system [Design of algorithmic and software for mechatronic systems] / Boshljakov A. A., Ovsjannikov S. B. — M., 2018. — P. 57. [in Russian]