ТЕОРЕТИЧЕСКИЕ ПРЕДПОСЫЛКИ К ИССЛЕДОВАНИЮ ПОПЕРЕЧНОЙ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ

ТЕОРЕТИЧЕСКИЕ ПРЕДПОСЫЛКИ К ИССЛЕДОВАНИЮ ПОПЕРЕЧНОЙ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ
Научная статья
Давиденко А.Н.1, *, Лапшин Н.А.2
1 ORCID 0000-0002-4535-0683;
2 ORCID 0000-0001-5092-8200;
1,2 Армавирский государственный педагогический университет, Армавир, Россия
* Корреспондирующий автор (andavidenko[at]mail.ru)
АннотацияОпрокидыванию транспортного средства соответствует такое поднятие движителя над опорной поверхностью, при котором угол крена каркаса достигает предельного значения и дальнейшее его движение в направлении крена под действием силы тяжести и инерции становится необратимым.
Целью данных исследований являлось нахождение алгоритма определения угла поперечной статической устойчивости ТС путем взвешивания по опорам конструкции в горизонтальном и наклонном положениях при малых углах наклона и получения угла статической устойчивости с помощью расчетов.
Задачи исследования: разработать опытно-аналитический метод, который позволил бы определить угол поперечной статической устойчивости без применения дорогостоящих стационарных стендов.
Основными критериями устойчивости транспортного средства против опрокидывания являются характеристика его геометрических параметров и расположение центра масс относительно движителя, определяющие границы статической устойчивости при помощи так называемых предельных углов. При расположении транспортного средства на наклонной опорной поверхности, соответствующей одному из предельных углов, возникает опрокидывание под действием только сил тяжести. Если учитывать влияние и других сил, кроме силы тяжести, то следует иметь в виду критические углы, характеризующие начало опрокидывания в рассматриваемом случае [1, С. 78], [2, С. 15].
Ключевые слова: опрокидывание, транспорт, цент масс, груз, статическая поперечная устойчивость, сельскохозяйственные агрегаты.
THEORETICAL PREREQUISITES TO INVESTIGATION OF TRANSVERSE STATIC STABILITY OF VEHICLES
Research article
Davidenko A.N.1, *, Lapshin N.A.2
1ORCID 0000-0002-4535-0683,
2ORCID 0000-0001-5092-8200,
1,2 Armavir State Pedagogical University, Armavir, Russia
* Corresponding author (andavidenko[at]mail.ru)
AbstractThe tilting of the vehicle corresponds to a lifting of the propeller above the supporting surface, in which the roll angle of the frame reaches a limiting value and its further movement in the direction of the list under the action of gravity and inertia becomes irreversible.
The purpose of these studies was to find an algorithm for determining the angle of the transverse static stability of the vehicle by weighing along the supports of the structure in horizontal and oblique positions at small angles of inclination and obtaining an angle of static stability using calculations.
Research objectives: develop an experimental-analytical method that allows determining the angle of transverse static stability without the use of expensive stationary stands.
The main criteria for the stability of the vehicle against tilting are the characteristic of its geometric parameters and the location of the center of mass relative to the propulsion device, which determines the boundaries of static stability using so-called limiting angles. When the vehicle is positioned on an inclined support surface corresponding to one of the limiting angles, a tilting occurs under the action of only gravity forces. If we take into account the influence of other forces other than gravity, we should bear in mind the critical angles characterizing the onset of overturning in the case under consideration. [1, P. 78], [2, P. 15].
Keywords: overturning, transport, cent of mass, cargo, static transverse stability, agricultural aggregates.
Под транспортным средством (ТС) будем понимать технические устройства для перевозки людей, грузов, а также самоходные сельскохозяйственные агрегаты.
Под опрокидыванием будем понимать некоторое вращательное движение ТС относительно определенной оси, которую будем называть осью опрокидывания. Ось опрокидывания – это прямая, вокруг которой вероятен поворот в вертикальной плоскости ТС на некоторый угол. Способность ТС выполнить поворот относительно оси, лежащей в поперечной плоскости, связывается с определением его продольной устойчивости для недопущения опрокидывания. Возможность поворота относительно оси, расположенной в продольной плоскости ТС, зависит от его поперечной устойчивости [3, С. 90], [4, С. 234].
Во время опрокидывания происходит поворот агрегата вокруг оси опрокидывания, при котором достигается соотношениегде ![]() – опрокидывающий момент;
– опрокидывающий момент; ![]() – момент сил, стремящихся вернуть ТС в исходное положение.
– момент сил, стремящихся вернуть ТС в исходное положение.
За ось поперечного опрокидывания принимают линию, соединяющую центры площадок контактов передних и задних колес одного борта.
Поперечная боковая устойчивость – это свойство ТС сопротивляться опрокидыванию. Началу опрокидывания предшествует перераспределение по бортам опорных реакций движителя. Максимальное положение появляется в то время, когда вертикальная плоскость, которая проходит через центр тяжести, пройдет и через ось опрокидывания. Статическая поперечная боковая устойчивость транспортного средства оценивается по максимальному углу наклона, когда оно располагается в состоянии неподвижности.
Процесс опрокидывания испытуемого образца рассмотрим как процесс опрокидывания «жесткой» конструкции.
Под «жесткой» конструкцией, в данном случае, следует понимать простейшую модель реальной конструкции, центр масс которой не меняет своего положения относительно опорной поверхности при ее наклоне.
Для визуализации и упрощения расчета угла поперечной статической устойчивости изобразим ТС в виде абстрактного куба с равномерно распределенной массой, координаты центра масс которого известны [5, С. 12], [6, С. 234].
Спроецируем выбранную модель на фронтальную плоскость (ФП) (рис. 1). Обозначим ребра куба - А, В, C и D, а грани куба - АВ, АD, ВC, CD, которые перпендикулярны ФП. Точка O – проекция центра масс на соответствующую плоскость.
Выполним подъем в точке В на высоту h, соответственно произойдет поворот куба вокруг ребра А против часовой стрелки на угол a, в этом случае проекция АВCD перейдет в АВ1C1D1, а центр масс переместиться в точку O1.
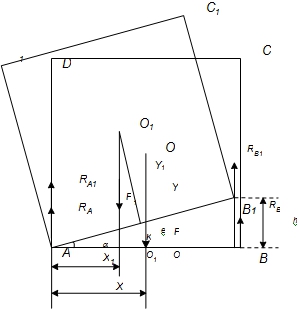
Рис. 1 – Проекция куба на ФП
Для простоты расчетов можно объект свести к точке сосредоточения массы - точке O, то соответственно сила тяжести – F куба будет приложена к точке O и направлена вдоль оси ординат «вниз». При подъеме объекта вектор действия силы F будет стремиться к вектору действия силы реакции опоры RА (рисунок 1). При дальнейшем подъеме вектора действия этих двух сил совпадут и тело потеряет устойчивость, а угол наклона станет критическим aк. Этот угол определяет резерв устойчивости данного объекта при вращении вокруг ребра А [6, С. 233]. При a = aк,
![]() (2)
(2)
где Х и Y – координаты центра масс O.
Выразим Х и Y через параметры, которые могут быть определены опытным путем: F, Rb, Rb1, h и a. В горизонтальном положении объекта определяются F, Rb и АВ. Из условия равновесия видно, что сумма моментов относительно точки А равно нулю ![]() , соответственно получим
, соответственно получим ![]() .
.
Следовательно:
![]() (3)
(3)
где Rb - реакция опоры в точке В, F – вес куба, Х – расстояние от линии вращения (точки А) до проекции центра тяжести куба в горизонтальном положении.
Произведем поворот куба около точки А против часовой стрелки на произвольный угол такой, что a< 0.5aк. Экспериментальным путем можно вычислить Rb1 и a или h. Из условия равновесия получим
![]() (4)
(4)
где Rb1 - реакция опоры в точке В1,
Х1 – расстояние от оси поворота до проекции точки О после наклона на угол a.
Координату точки О (ЦМ) можно определить какТак как ![]() (6)
(6)
где h – высота, на которую поднята точка В.
Таким образом, можно вычислить aк, подставив в (2) координаты центра масс (3) и, беря в расчет (6), получим
![]() (7)
(7)
Угол статической устойчивости a, при определении экспериментальным путем, вычисляют по формуле
![]() (8)
(8)
где Rb - реакция опоры в точке В, Rb1 - реакция опоры в точке В1. [6]
Проверим справедливость полученных выражений при рассмотрении модели «жесткой» конструкции с неравномерно распределенной массой.
Представим два предельных случая распределения массы модели.
В первом случае при Y=0 вся масса распределена на грани АВ куба, а проекция центра масс O лежит на отрезке АВ. В этом случае при угле в пределах 0<a<p/2 имеем Rb1=Rb и aк=arcctg 0 = π/2. Таким образом, при Y=0 куб имеет абсолютную устойчивость.
Во втором случае при Х=0 вся масса распределена на грани AD, а проекция центра масс O лежит на отрезке AD. В этом случае если a=0, то Rb=0 и при подстановке в формулу (6) получаем неопределенность вида (0/0), а при угле, лежащем в границах 0<a<π/2 Rb1<0. Следовательно, при Х=0 тело абсолютно неустойчиво [7, С. 26], [8, С. 25].
Рассматриваемый подход позволяет сделать вывод о целесообразности подъема испытуемого образца с одной стороны на угол до 15°, который меньше реального угла продольной статической устойчивости, а далее угол опрокидывания можно рассчитать по формуле 8.
Проведенный теоретические исследования, дают предпосылку применить полученные результаты при разработке опытно-аналитического метода для определения угла поперечной статической устойчивости , задача которого будет заключаться в обеспечении плавного подъема одной стороны транспортного средства на разные величины углов в пределах от 0° до 15°, контроль угла наклона, фиксирование изменения реакции под опорными колесами [9, С. 221], [10, С. 215].
Поперечная устойчивость транспортного средства должна быть проверена в отношении возможности его опрокидывания около нижних кромок опорной поверхности ходовых частей.
Колесные транспортные средства, например самоходные сельскохозяйственные агрегаты имеют, как правило, регулируемую ширину колеи. В зависимости от ширины колеи изменяются значения предельных статических углов поперечного уклона. При расстановке колес на основной размер колеи для тракторов с колесной формулой 4К2 и 4К4 значения этих углов находятся в пределах 40 … 50°.
При анализе полученных выражений видна зависимость значения угла поперечной статической устойчивости от высоты центра тяжести.
Увеличение спроса и расширение выпуска самоходных сельскохозяйственных агрегатов (ССХА) на шинах сверхнизкого давления указывает на необходимость исследования и оценки параметров управляемости и устойчивости, указанных ССХА, существенно влияющих на их активную безопасность.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Гуськов В. В. Тракторы, теория / под ред. В. В. Гуськова. – М. : Машиностроение, 1988. – 375 с.
- Клецкин М. И Справочник конструктора сельскохозяйственных машин / под ред. М. И. Клецкина. – М. : Машиностроение, 1967. – Т. 1. – 760 с.
- Беспятый Ф.С. Конструкция, основы теории и расчет трактора / Ф. С. Беспятый, И.Ф. Троицкий. – 2-е изд. – М.: Машиностроение, 1972. - 502 с.
- Котляренко В. И. Моделирование испытаний и сервиса автомобилей / В. И. Котляренко, А. В Сироткина, В.И. Сальников и др. –Братск.: РИО ГОУ ВПО БрГУ, 2006. – 154 с.
- ГОСТ Р 52778–2007. Испытания сельскохозяйственной техники. Методы эксплуатационно-технологической оценки. – Введ. 2008–07–01. –М. :Стандартинформ, 2008. – 23 с.
- Лапшин Н.А. Определение угла поперечной статической устойчивости с помощью мобильного стенда и программы "устойчивость" / Н.А Лапшин, Р.А Дьяченко, М.Г. Решетняк // Современные проблемы науки и образования. – 2012. – № 2. –С. 232-239.
- Таркивский В.Е. Стенд для определения угла поперечной статической устойчивости агрегата / В.Е. Таркивский, Н.А. Лапшин // Техника и оборудование для села. –2011. –№ 11. –С. 26-27.
- Лапшин Н.А. Экономическая эффективность мобильного стенда для измерения угла поперечной статической устойчивости агрегатов / Н.А. Лапшин // Техника и оборудование для села. –2014. – № 4 (202) . –С. 24-25.
- Барский, И. Б. Конструирование и расчет тракторов / И. Б. Барский. – М. : Машиностроение, 1980. – 335 с.
- Гуревич, А. М. Конструкция тракторов и автомобилей / А. М. Гуревич, А. К. Болотов, В. И. Судницын. – М. : Агропромиздат, 1989. – 368 с.
Список литературы на английском языке / References in English
- Gus'kov V. V. Traktory, teoriya [Tractors, Theory] / edited by V. V. Gus'kova – M. : Mashinostroenie, 1988. – 375 p. [in Russian]
- Kleckin M. I Spravochnik konstruktora sel'skohozyajstvennyh mashin [Reference book of the designer of agricultural machines] / edited by M. I. Kleckina. – M. : Mashinostroenie, 1967. – T. 1. – 760 p. [in Russian]
- Bespyatyj F.S. Konstrukciya, osnovy teorii i raschet traktora [Design, theory and calculation of the tractor] / F. S. Bespyatyj, I.F. Troickij. – 2nd edition. – M.: Mashinostroenie, 1972. - 502 p. [in Russian]
- Kotlyarenko V. I. Modelirovanie ispytanij i servisa avtomobilej [Simulation of vehicle testing and service ] / V. I. Kotlyarenko, A. V Sirotkina, V. I. Sal'nikov and others –Bratsk.: RIO GOU VPO BrGU, 2006. – 154 p. [in Russian]
- GOST R 52778–2007. Ispytaniya sel'skohozyajstvennoj tekhniki. Metody ehkspluatacionno-tekhnologicheskoj ocenki [Testing of agricultural machinery. Methods of operational and technological assessment] – Vved. 2008–07–01. –M. :Standartinform, 2008. – 23 p. [in Russian]
- Lapshin N.A. Opredelenie ugla poperechnoj staticheskoj ustojchivosti s pomoshch'yu mobil'nogo stenda i programmy "ustojchivost" [Determination of the angle of transverse static stability using a mobile stand and the program " stability" ] /N.A Lapshin, R.A D'yachenko, M.G. Reshetnyak // Sovremennye problemy nauki i obrazovaniya [Modern problems of science and education]. – 2012. – № 2. –P. 232-239. [in Russian]
- Tarkivskij V.E. Stend dlya opredeleniya ugla poperechnoj staticheskoj ustojchivosti agregata [Stand for determining the angle of the static transverse stability of the unit ] / V.E. Tarkivskij, N.A. Lapshin // Tekhnika i oborudovanie dlya sela [Machinery and equipment for the village]. –2011. – № 11. –P. 26-27. [in Russian]
- Lapshin N.A. EHkonomicheskaya ehffektivnost' mobil'nogo stenda dlya izmereniya ugla poperechnoj staticheskoj ustojchivosti agregatov [Cost-effectiveness of mobile stand for measuring the angle of static cross-section stability of units] / N.A. Lapshin // Tekhnika i oborudovanie dlya sela [Machinery and equipment for the village]. –2014. – № 4 (202). –P. 24-25. [in Russian]
- Barskij I. B. Konstruirovanie i raschet traktorov [Design and calculation of tractors] / I. B. Barskij. – M. : Mashinostroenie, 1980. – 335 p. [in Russian]
- Gurevich A. M. Konstrukciya traktorov i avtomobilej [Construction of tractors and cars] / A. M. Gurevich, A. K. Bolotov, V. I. Sudnicyn. – M. : Agropromizdat, 1989. – 368 p. [in Russian]