РЫЧАЖНОЕ УСТРОЙСТВО КОРРЕКЦИИ ПОЛОЖЕНИЯ ИЗДЕЛИЙ ПРИ ЗАХВАТЕ МАНИПУЛЯЦИОННОМ МЕХАНИЗМОМ

Сысоев С.Н.1, Литвинов И.С.2, Гольцов К.В.3, Безруков Ю.С.4
1Профессор, доктор технических наук, Владимирский государственный университет имени А.Г. и Н.Г. Столетовых, 2Аспирант, Владимирский государственный университет имени А.Г. и Н.Г. Столетовых, 3Магистрант, Владимирский государственный университет имени А.Г. и Н.Г. Столетовых, 4Магистрант, Владимирский государственный университет имени А.Г. и Н.Г. Столетовых
РЫЧАЖНОЕ УСТРОЙСТВО КОРРЕКЦИИ ПОЛОЖЕНИЯ ИЗДЕЛИЙ ПРИ ЗАХВАТЕ МАНИПУЛЯЦИОННОМ МЕХАНИЗМОМ
Аннотация
Анализируются рычажные устройства коррекции положения изделий, занимающих неопределенное положение по координате, углу и имеющих перекос относительно сопрягаемой поверхности. Описывается новый рычажный корректирующий модуль, использующий комбинированный метод коррекции положения изделий, реализующий принцип рефлекторной системы управления, который позволяет существенно повысить эффективность применения рычажных корректирующих устройств. Приводятся результаты натурных исследований предлагаемого устройства в различных вариантах конструктивного исполнения.
Ключевые слова: коррекция положения изделий при захвате, рычажные корректирующие устройства, рефлекторная система управления, гибкий шток.
Sysoev S.N.1, Litvinov I.S.2, Goltsov K.V.3, Bezrukov Yu.S.4
1Professor, PhD in Engineering, Vladimir State University named after Alexander and Nikolay Stoletovs, 2Postgraduate Student, Vladimir State University named after Alexander and Nikolay Stoletovs, 3Undergraduate Student, Vladimir State University named after Alexander and Nikolay Stoletovs, 4Undergraduate Student, Vladimir State University named after Alexander and Nikolay Stoletovs
LEVERAGE DEVICE FOR PRODUCT POSITION CORRECTION DURING MANIPULATING MECHANISM CAPTURE
Abstract
The article analyzes the lever position of the correction devices that occupy an uncertain position at the coordinate, angle and having a cocking relative to the interfaced surface. A new lever correction module with a combined method for correcting the position of products which implements the principle of a reflex control system is described. It enables us to significantly improve the effectiveness of lever correction devices. The results of field studies of the proposed device in various versions of the design are presented.
Keywords: correction of the products position during the capture, lever correction devices, reflector control system, flexible rod.
В автоматизированных сборочных производствах постоянно возникает необходимость решения сложных задач по обеспечению захвата рабочим органом манипуляционного механизма изделия, занимающего неопределенное положение по координате и углу, а также имеющего перекос относительно сопрягаемой поверхности.
Актуальной задачей является поиск технического решения, которое позволит обеспечить захват изделия на любом уровне его расположения в пределах рабочего хода привода перемещения захвата, а также обеспечить адаптацию к возможному перекосу исходного положения изделия.
Анализ показал, что наиболее эффективно с этой задачей могут справиться рычажные корректирующие устройства, обладающие как конструктивной простотой, так и простотой управления. Данные устройства реализуют принцип комбинированной адаптации, рефлекторной системы управления, где используются причинные взаимосвязи между физическими явлениями, происходящими в технологическом процессе [1].
Предпочтительными в использовании по быстродействию являются рычажные корректирующие устройства с расширенным шагом коррекции, которые выполнены с применением упругого гибкого стержня [2].
Однако в ходе анализа было выявлено, что подобные устройства имеют ограниченную область применения по номенклатуре захватываемых изделий. Например, они не могут осуществлять подъем изделия, имеющего смещенный центр тяжести относительно захвата. С одной стороны отсутствие достаточной жесткости гибкого стержня ограничивает область применения захватного корректирующего модуля, с другой стороны, для выполнения функции смещения изделия требуется максимальная гибкость стержня.
Во Владимирском государственном университете синтезирован захватный корректирующий модуль [3] с регулируемой жесткостью механизма коррекции, позволяющий существенно расширить область применения рычажных корректирующих устройств путем расширения номенклатуры захватываемых изделий.
Механизм коррекции устройства состоит из упругого гибкого стержня, выполненного с возможностью изгиба при силовом взаимодействии изделия с направляющими элементами в процессе его подъема. Гибкий стержень выполнен в виде шариковой цепочки, внутри которой установлена тяга, одним концом соединенная с захватом, а другим – через механизм натяжения с подвижным рабочим органом. Гибкий стержень может быть выполнен также в виде шариковой цепочки, заключенной в спиральную пружину, что позволяет задавать расширенный диапазон требуемой упругости гибкого стержня для работы с конкретными изделиями на различных этапах функционирования устройства.
Устройство со спиральной пружиной состоит (рис. 1) из корпуса 1 с установленными на нем направляющими элементами 2, а также привода 3 перемещения захвата с подвижным рабочим органом. Привод выполнен в виде пневмоцилиндра одностороннего действия с подпружиненной штоковой полостью.
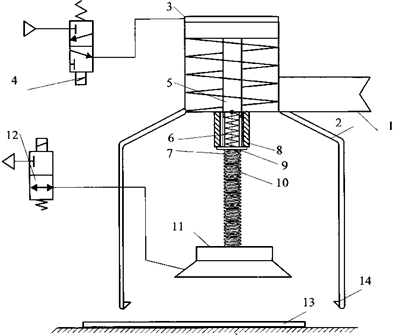
Рис. 1 – Схема корректирующего устройства с переменной изгибной жесткостью тяги
Поршневая полость соединена с пневмолинией избыточного давления воздуха через распределитель 4. На подвижном рабочем органе 5 привода через пружину растяжения 6 закреплена тяга 7, выполненная в виде шариковой цепочки.
На корпусе установлена ограничительная втулка 8, выполненная с возможностью взаимодействия с упором 9, закрепленном на тяге 7. Тяга расположена внутри спиральной пружины 10, закрепленной одним концом с ограничительной втулкой 8, а другим – с корпусом вакуумного захвата 11, рабочая камера которого выполнена с возможностью соединения с атмосферой или с линией разрежения воздуха через распределитель 12. Устройство захватывает и корректирует положение изделия 13, устанавливая его на фиксаторы 14, закрепленные на концах направляющих 2.
Схема работы корректирующего модуля показана на рис. 2. При приближении изделия к направляющим, уменьшается силовое воздействие тяги на спиральную пружину и уменьшается величина ее изгибной жесткости. Так как изделие смещено относительно требуемого положения влево, то оно соприкасается с левым направляющим. В результате их силового взаимодействия в процессе продолжающегося подъема подвижного рабочего органа происходит не только поворот захвата против часовой стрелки, но и перемещение корпуса захвата с изделием в направлении перекоса. Изделие перемещается в сторону требуемой коррекции его положения до тех пор, пока не переместится за левый фиксатор.
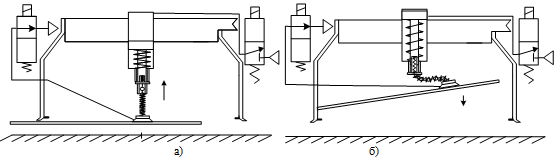
Рис. 2 – Этапы работы захватного корректирующего устройства: а) начало коррекции; б) завершение корректирующего смещения изделия
В лаборатории кафедры автоматизации технологических процессов Владимирского государственного университета натурные исследования работы данного устройства проводились на лабораторном стенде, показанном на рис. 3.
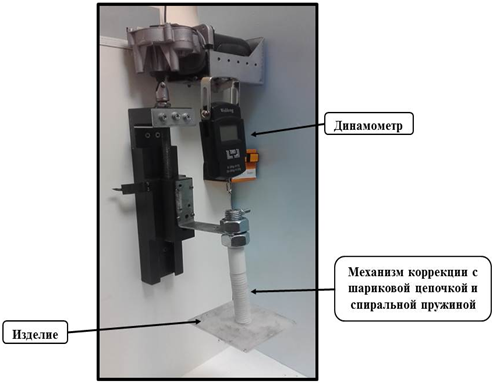
Рис. 3 - Лабораторный стенд исследования работы устройства коррекции с гибкой шариковой тягой и пружиной
Первоначально исследовались характеристики тяги, выполненной в виде шариковой цепочки без спиральной пружины. Исследуемое устройство (рис. 4) состоит из корпуса, в котором неподвижно закреплена ограничительная втулка. Гибкая тяга выполнена в виде шариков, через которые протянут гибкий нерастяжимый трос, закрепленный на изделии. Натяжением троса с силовым воздействием F изменяют изгибную жесткость тяги.
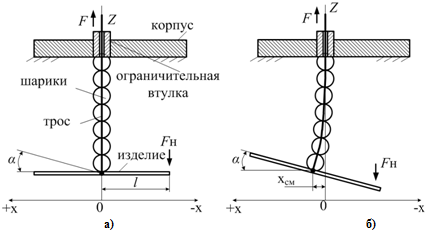
Рис. 4 – Схема исследований шариковой гибкой тяги: а) положение звеньев при отсутствии Fн; б) положение звеньев при наличии Fн
Эксперименты проводились для различных вариантов длин тяги, выполненной из трех, пяти и семи шариков, диаметром 15мм. Вес изделия - 0, 045кг. Размер изделия 98х98х3 мм. График зависимости перекоса изделия от величины натяжения троса гибкой тяги из 3 шариков показан на рис. 5.
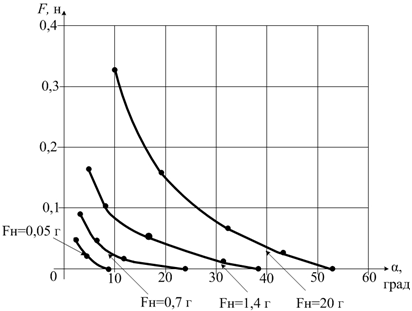
Рис. 5 - . График зависимости перекоса изделия от величины натяжения троса гибкой тяги из трех шариков, где: 1, 2, 3, 4 – соответственно Fн = 0,05г, 0,7г, 1,4г, 20г
Вторым этапом исследовалась устройство, механизм коррекции которого конструктивно выполнен с использованием гибкой шариковой тяги и спиральной пружины (рис. 6), состоящее из корпуса 1, в котором неподвижно закреплена втулка-ограничитель 2. Гибкая тяга выполнена в виде шариков 3, через которые протянут гибкий нерастяжимый трос 4, закрепленный на изделии 5. Шариковая цепочка заключена в спиральную пружину 6. Натяжением троса с силовым воздействием F сжимают пружину 6, изменяя изгибную жесткость тяги.
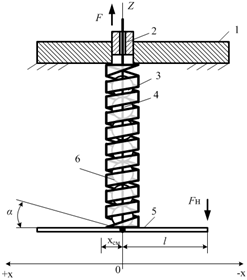
Рис. 6 - Схема измеряемых параметров работы шариковой цепочки со спиральной пружиной в исходном положении
На рис. 7 показаны схемы изменения измеряемых параметров шариков цепочки со спиральной пружиной.

Рис. 7 - Схема изменения измеряемых параметров шариков цепочки со спиральной пружиной: а) при отсутствии F; б) при наличии F
Пример зависимости угла перекоса изделия от величины натяжения троса гибкой тяги показан на рис. 8. Эксперименты проводились с гибкой тягой, состоящей из семи шариков, диаметром 15мм. Вес изделия 0,045кг. Вес изделия с шариками и пружиной 0,07кг. Размер изделия 98х98х3 мм. Максимальная величина коррекции 50мм. Наружный диаметр спиральной пружины 20мм, толщина -2мм, ширина -10мм.
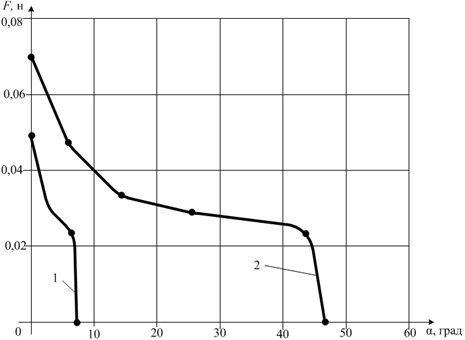
Рис. 8 - График зависимости перекоса изделия от величины натяжения троса гибкой тяги из семи шариков и пружины, где: 1, 2 – соответственно Fн = 0,05г и 20г
Установленные зависимости величины изгибной жесткости гибкой тяги от величины натяжения троса механизма коррекции для различных вариантов исполнения шариковой цепочки показали, что количество и величина применяемых шариков в гибком штоке без использования спиральной пружины незначительно влияет на характер кривых и величину зависимости перекоса изделия от величины натяжения троса гибкой тяги. При этом подобная конструкция не обеспечивает устранения перекоса изделия до 10 градусов.
Наиболее эффективным устройством, обеспечивающим захват изделия на любом уровне его расположения и адаптацию к перекосу исходного положения изделия, является корректирующее устройство, в котором элемент коррекции выполнен в виде шариковой цепочки с тросом, помещенной в спиральную пружину.
Список литературы / References
- Сысоев С.Н., Рычажные устройства автоматизированного процесса сборки изделий типа «вал-втулка» / С.Н. Сысоев, И.С. Литвинов, В.А. Овчинников // Международный научно-исследовательский журнал . – №9 (40). – Часть 2. – 2015. – С. 96-99.
- Пат. 129044 Российская Федерация, МПК B25J 15/06. Захватный корректирующий модуль / Сысоев С.Н., Корегин А.Н., Осипов В.А., Претека Н.В. - № 2012157839; заявл. 27.12.2012, опубл. 20.06.2013, Бюл №17. – 3с.
- Пат. 2618019 Российская федерация, МПК B 25J 15/06 Захватный корректирующий модуль / Сысоев С.Н., Литвинов И.С., Безруков Ю.С. (RU) – № 2618019 ; заявл. 12.2015, опубл. 02.05.17, Бюл. №13. – 3с.
Список литературы на английском языке / References in English
- S.N. Sysoev, I.S. Litvinov, V.A. Ovchinnikov Rychazhnye ustrojstva avtomatizirovannogo processa sborki izdelij tipa «val-vtulka» [Lever type devices of “sleeve-shaft” part automatized assembly] / S.N. Sysoev, I.S. Litvinov, V.A. Ovchinnikov // Mezhdunarodnyj nauchno-issledovatel'skij zhurnal [International research journal]. – №9(40). – Part 2. – 2015.– №9 (40). – P. 96-99. [in Russian]
- Pat. 129044 Rossijskaja Federacija [Patent of Russia], MPK B25J 15/06. Zahvatnyj korrektirujushhij modul' [Gripping corrective device] / Sysoev S.N., Koregin A.N., Osipov V.A., Preteka N.V. - №2012157839; zajavl.27.12.2012, opubl. 20.06.2013, Bjul №17. – 3 p. [in Russian]
- Pat. 2618019 Rossijskaja federacija [Patent of Russia], MPK B 25J 15/06 Zahvatnyj korrektirujushhij modul' [Gripping corrective device] / Sysoev S.N., Litvinov I.S., Bezrukov Ju.S. (RU) – № 2618019 ; zajavl. 21.12.2015, opubl. 02.05.17, Bjul. №13. – 3 p. [in Russian]