ДИССИПАТИВНАЯ ФУНКЦИЯ КУЛОНОВСКОГО ТРЕНИЯ НА ПОЛИГОНАЛЬНОЙ ПЛОЩАДКЕ КОНТАКТА

Червинский В.П.
Кандидат технических наук, доцент,
Самарский государственный университет путей сообщения
ДИССИПАТИВНАЯ ФУНКЦИЯ КУЛОНОВСКОГО ТРЕНИЯ НА ПОЛИГОНАЛЬНОЙ ПЛОЩАДКЕ КОНТАКТА
Аннотация
В статье приводится решение в квадратурах задачи об определении главного вектора и главного момента сил трения, возникающих при плоском движении относительно шероховатой плоскости площадки, ограниченной полигональным контуром, на которую действует равномерно распределенное нормальное давление. Подобные задачи возникают при исследовании сил сцепления железнодорожных колесных пар с рельсами, включающих силы упругих деформаций в зоне пятна контакта. Результаты статьи могут быть использованы для сравнительной оценки трибологических характеристик смазочных материалов, полученных экспериментальным путем.
Ключевые слова: кулоновское трение, полигональный контур, равномерное давление, плоское движение.
Chervinskiy V.P.
PhD in Engineering, Associate Professor,
Samara State University of Transport Communications
DISSIPATIVE FUNCTION OF COULOMB FRICTION ON POLYGONAL CONTACT PATCH
Abstract
The paper presents a solution in the quadratures of the problem of determining the principal vector and the principal moment of frictional forces arising from plane motion relative to the rough plane of the area limited by a polygonal contour affected by a uniformly distributed normal pressure. Similar problems arise in the study of traction forces of railway wheel pairs, including the forces of elastic deformations in the contact patch area. The results of the article can be used for comparative evaluation of the tribological characteristics of experimentally obtained lubricants.
Keywords: Coulomb friction, polygonal contour, uniform pressure, plane motion.
Силы трения и их моменты присутствуют в любой механической системе и существенным образом влияют на их работу. Большое значение играют силы трения в задачах взаимодействия железнодорожного транспорта с рельсами [1], при решении которых необходимо учитывать, что железнодорожные колесные пары совершают сложное движение [2, С. 69], [3, С. 146], которое и определяет движение пятна контакта колеса относительно рельса.
При качении одного твердого тела по другому очертание пятна контакта существенным образом зависит от величины прижимающей силы и геометрии соприкасающихся поверхностей и может принимать произвольную форму. Поэтому определение сил и моментов трения, возникающих на площадке контакта, представляет собой достаточно сложную задачу [4, С. 137], которую нередко предпочитают решать экспериментальным путем, что приводит к дополнительным затратам в зависимости от требуемой точности и затрудняет количественный анализ факторов, влияющих на определяемые величины. Указанные аргументы подтверждают актуальность нахождения аналитических решений таких задач, пригодных как для численной оценки сил и моментов трения, так и для сравнения точности разных методов их экспериментального определения.
Аналитическое решение задачи определения диссипативной функции и момента сил сухого (кулоновского) трения на круговой площадке контакта приводится в [5, С. 237], в [6] на основании метода, предложенного в [5], получено решение этой же задачи в квадратурах для эллиптического пятна контакта. По мере роста нормальной к поверхности контакта силы и износа поверхности катания колеса площадки контакта приобретают более сложную форму [4,C. 408], которую с целью моделирования процесса трения предлагается аппроксимировать полигональным выпуклым контуром (рис1). Вершины этого многоугольника могут задаваться как декартовыми, так и полярными координатами с началом в произвольной точке О.
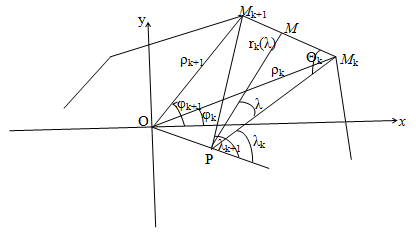
Рис. 1 – Полигональное пятно контакта
Под диссипативной функцией далее будем понимать модуль главного вектора элементарных сил трения скольжения, возникающих в пятне контакта, которое в общем случае совершает плоское движение относительно неподвижной шероховатой плоскости. Актуальным приложением рассматриваемой задачи может служить качение железнодорожных колес, которые в большинстве случаев совершают движение с верчением вокруг вертикальной оси (вилянием) [2, C. 69].
Согласно методу, изложенному в [5, С. 237], модуль этого главного вектора определяется формулой
![]() , (1)
, (1)
где
f – коэффициент трения скольжения, не зависящий от скорости,
G=pS – нормальная сила, прижимающая колесо (тело) к рельсу (плоскости контакта),
p – давление, равномерно распределенное по всей площадке,
S - площадь многоугольника, ω – угловая скорость вращения твердого тела вокруг вертикальной оси Oz.
В полярной системе координат (r, λ) c полярной осью OP в случае расположения мгновенного центра скоростей внутри контура площадки величина r* равна
![]() , (2)
, (2)
где r(λ)=PM – расстояние от элементарной площадки до мгновенного центра скоростей P, координаты которого определяются формулами
 , (3)
, (3)
где Vox и Voy – проекции скорости полюса на связанные с площадкой оси координат, а M – точка контура пятна. Следовательно, задача нахождения диссипативной функции сводится фактически к определению поля скоростей точек, принадлежащих площадке контакта колеса. Координаты мгновенного центра скоростей в каждый момент времени считаем известными.
Положим, что вершины контура Mk заданы полярными координатами ρk и φk (см. рис.1). Площадь контакта тогда легко определяется с использованием формулы для модуля векторного произведения двух векторов, под которыми будем понимать радиус-векторы вершин многоугольника в декартовой системе координат xOy
![]() . (4)
. (4)
Здесь и далее N – число треугольников, на которое разбивается площадка контакта
Так как контур пятна контакта – полигональный, то формула (2) приобретает вид
 (5)
(5)
Для определения расстояния rk(λ) отрезки, соединяющие вершины треугольников с началом системы координат О и с мгновенным центром скоростей P, будем считать векторами с началом в точках О и P соответственно. Тогда, считая заданными полярные координаты вершин многоугольника Mk(ρk, φk), находим
 . (6)
. (6)
Из рис.1 непосредственно видно, что
![]() , (7)
, (7)
где вектор ![]() задается своими проекциями
задается своими проекциями
![]() . (8)
. (8)
Подставляя (7) с учетом (8) в (6), получаем
 . (9)
. (9)
Формулу (9) будем использовать для вычисления пределов интегрирования в правой части формулы (5).
Рассматривая треугольник PMMk, находим
![]() , (10)
, (10)
где угол θk определяется с помощью формулы
 (11)
(11)
Подстановка (10) в (5) дает
 (12)
(12)
Подставляя (12) с учетом (4) в (1), получаем окончательную формулу для расчета диссипативной функции на полигональной площадке контакта.
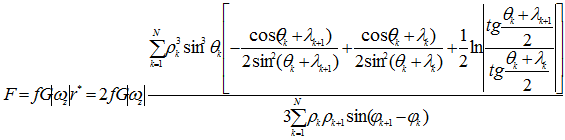 (13)
(13)
В случае расположения мгновенного центра скоростей вне площадки контакта формула (12) остается справедливой, потому что при ее выводе на координаты мгновенного центра скоростей не накладывались никакие дополнительные условия.
Так как площадка контакта совершает плоское движение относительно рельса, то при исследовании динамического взаимодействия колеса с рельсом необходимо знание момента сил трения, возникающего в пятне контакта.
Момент сил трения на площадке контакта равен модулю главного момента элементарных сил трения, приложенных в каждой ее точке, относительно выбранного центра – начала системы координат и определяется формулой
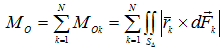 , (14)
, (14)
где определение rk и ![]() ясно из рис.2, а через SΔ обозначена площадь k – го треугольника OMkMk+1.
ясно из рис.2, а через SΔ обозначена площадь k – го треугольника OMkMk+1.
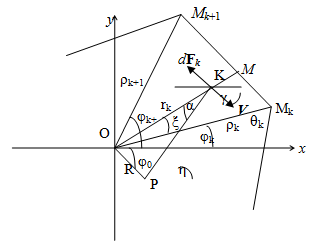
Рис.2 - К определению момента сил трения, V – вектор скорости элементарной площадки, ![]() – элементарная сила трения.
– элементарная сила трения.
На рис.2 непосредственно видно, что вектор rk можно задать его проекциями на оси связанной с площадкой контакта системы координат Oxy
![]() . (15)
. (15)
Аналогично можно представить элементарную силу трения в виде
![]() , (16)
, (16)
где смысл f и p определен выше, а для угла γ имеем формулы
![]() ,
,
в которых
 .
.
Подстановка (15) и (16) в (13) дает
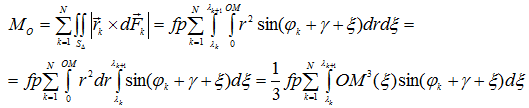 (17)
(17)
Рассматривая треугольник OMkMk+1 , находим
![]() . (18)
. (18)
Подставляя в (18) ![]() , получаем уравнение относительно OM
, получаем уравнение относительно OM
 ,
,
решение которого имеет вид
 . (19)
. (19)
Далее определяем угол θk , для чего используем формулу
 (20)
(20)
Подставляя (20) в (19), получаем расстояние OM как функцию угла ξ.
Следующая подстановка (19) в (17) дает
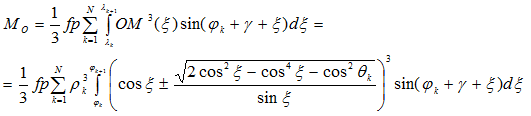 (21)
(21)
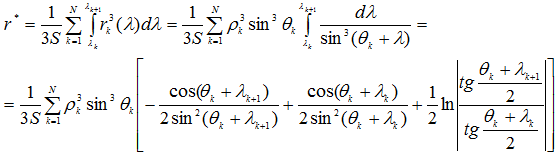
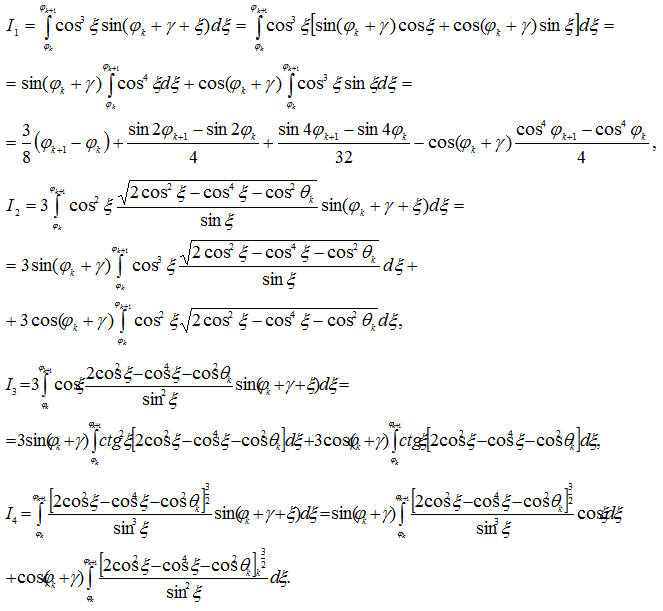
В результате преобразования интеграла в правой части (21) получаем
 , (22)
, (22)
где
Заключение
В статье получена формула для расчета главного вектора элементарных сил сухого трения на полигональной площадке контакта, совершающей плоское движение. Модуль главного вектора сил трения пропорционален отношению частичных сумм рядов, число членов которых равно числу вершин многоугольника, которым аппроксимируется площадка контакта, а члены рядов есть функции полярных координат вершин многоугольника.
Формула расчета для модуля главного вектора сил кулоновского трения ковариантна по отношению к переходу мгновенного центра скоростей из внутренней части площадки контакта во внешнюю область.
В статье приводится решение в квадратурах задачи об определении момента сил сухого трения на полигональной площадке, совершающей плоское движение по неподвижной шероховатой плоскости. Погрешность аппроксимации определяется числом вершин многоугольника и численно равна модулю первого отбрасываемого члена ряда в формулах (13) и (21).
Полученные формулы могут использоваться в прикладных задачах качения железнодорожных колес при оценки сил и моментов кулоновского трения на площадках контакта, ограниченных произвольным контуром и совершающих плоское движение относительно шероховатой поверхности.
Численные расчеты по полученным формулам позволяют проводить сравнительный анализ характеристик смазывающих материалов.
Список литературы / References
- Вериго М.Ф. Взаимодействие пути и подвижного состава / М.Ф. Вериго, Ф.Я. Коган. – М.: Транспорт. –1986. –477 c.
- Вершинский С.В. Динамика вагона / С.В. Вершинский, В.Н. Данилов, И.И. Челноков. – М.: Транспорт. –1972.–303 c.
- Гарг В.К. Динамика подвижного состава / В.К. Гарг, Р.В. Дуккипати.– М.: Транспорт. –1988. – 392 с.
- Сакало В.И. Контактные задачи железнодорожного транспорта / В.И. Сакало, В.С. Косов – М.: Машиностроение. – 2004. – 495 c.
- Лурье А.И. Аналитическая механика / А.И. Лурье – M.: ГИФМЛ. – 1961. – 824 c.
- Червинский В.П. Диссипативная функция кулонова трения на эллиптической площадке контакта. / В.П. Червинский // Трение и износ. – 2011. –Т. 32. – № 5. – С. 511-521.
Список литературы на английском языке / References in English
- Verigo M.F., Kogan A.J. Vzaimodeystvie puti i podvizhnogo sostava [Interaction of the track and rolling stock] / M.F. Verigo, A.J. Kogan – M. : Transport.–1986. – 477 p.
- Vershinskii S.V. Dynamica vagona [The dynamics of the railway carriage] / S.V. Vershinskii, V.N. Danilov, I.I. Chelnokov. – M. : Transport. – 1972. – 303 p.
- Garg R.V. Dynamica podvizhnogo sostava [Dynamics of rolling stock] / R.V. Garg, М.K. Dukkipati. – M. : Transport. – 1988. – 392 p.
- Sakalo V.I., Contactnie zadachi zheleznodorozhnogo transporta [Contact tasks of the railway transport] / V.I. Sakalo, V.S. Kossov. – M. : Mashinostroenie. – 2004. – 495 p.
- Lurie A.I. Analyticheskaya mehanica [Analytical mechanics] / A.I. Lurie – M.: GIFML. – 1961. – 824 p.
- Chervinskii V.P. Dissipativnaya funkziya kulonova treniya nа ellipticheskoy ploschadke kontakta [Dissipative Function of Coulomb Friction on Elliptical Contact Area] / V.P. Chervinskii // Zhurnal Trenie i Iznos [Journal of Friction and Wear]. –2011. –Vol. 32. – № 5. – P. 511–521. [in Russian]