АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ВОДОПОДГОТОВКИ ОЧИСТНЫХ СООРУЖЕНИЙ

Сеферян А.Е.
Студент 2 курса магистратуры, Кубанский государственный технологический университет
АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ВОДОПОДГОТОВКИ ОЧИСТНЫХ СООРУЖЕНИЙ
Аннотация
В статье рассмотрены современные проблемы управления насосными группами, предложен эффективный метод управления, базирующийся на частотном регулировании и контроля одновременно нескольких регулирующих параметров.
Ключевые слова: АСУ ТП, частотное регулирование, водоподготовка.
Seferyan A. E
Student of the 2nd year master student, Kuban state technological University
ADAPTIVE CONTROL SYSTEM OF WATER TREATMENT FACILITIES
Abstract
The article considers the current problems of management of pump groups, proposed the most effective control method based on frequency regulation and control of several regulatory options.
Keywords: SCADA, frequency regulation, water treatment.
На объект водоочистки очистных сооружений г.к. Анапа поступают хозяйственно - бытовые стоки в буферную емкость 1 (рис.1). Контроль за притоком осуществляет электромагнитный расходомер 3 фирмы «Siemens» MAG 5000 c диаметром 500 мм (рис. 1.). Объем буферной емкости составляет 243 м3 (габаритные размеры 9х9х3м). Перекачкой жидкости из буферной емкости производит насосная группа 2 (рис. 1), с пиковой производительностью 210 м3/ч каждая. Контроль за подачей осуществляют электромагнитный расходомер 4 фирмы «Siemens» MAG 5000 c диаметром 250 мм (рис. 1.), установленный после насосных групп. Для контроля аварийных значений уровней, применены датчики 5 семейства FTL фирмы «Endress+Houser» (рис. 1.). Непрерывный контроль за уровнем в буферной емкости осуществляется гидростатичным датчиком 6 (рис. 1) фирмы «Endress+Houser» .
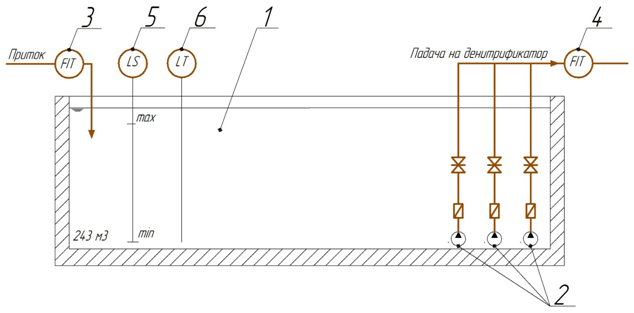
Рис. 1 – Технологическая схема узла подачи
Поступление стоков в течение суток не равнозначно, и в течении суток колеблется от 50 до 410 м3/ч. Среднестатистический суточный график представлен на рисунке 2.
Какой алгоритм выбрать при управлении насосной группы, состоящей из 3-х насосов?

Рис. 2 - Среднестатистический суточный график притока стоков
При дискретном методе управления реализуется модель, при котором количество одновременно включенных насосов соответствует некоторым значениям уровня воды в резервуаре. Например, при достижении уровня одного метра – включить 1 насос, при уровне 2 метра включить еще один насос. При достижении уровня 0,7 метра выключить все насосы. Данная модель достаточна распространена в промышленности и имеет ряд преимуществ: нет необходимости в частотных преобразователях, алгоритм работы достаточно прост для программирования ПЛК, силовая установка ограничивается только пускателями. Но применение данной модели не всегда рационально из-за недостатков:
- частые включения насосов;
- неравномерная (скачкообразная) подача жидкости. В нашем примере подача будет изменятся мгновенно до значений 0, 210 и 420 м3/ч соответственно.
В нашем примере (рис.1) насосные группы подают жидкость в денитрификатор, в котором живу анаэробные бактерии. При быстрой неконтролируемой подачи стоков, происходит мгновенное изменение значения растворенного кислорода и система жизнеобеспечения бактерий не успевает быстро обогатить денитрификатор кислородом, следствии чего бактерии гибнут. Следовательно, такая модель управления не подходит для нашей цели.
Исходя из производительности насосов, в процессе управления развиваются 2 сценария:
Рассмотрим первый случай. Приток стоков находиться в диапазоне 0 - 210 м3/ч. В данном случае достаточно 1 насоса в работе. В зависимости от скорости притока (0-210м3/ч) система управления устанавливает задание для ПИ - регулятора, управляющего данным насосом. Задание для регулятора меняется по показаниям расходомера 3 (рис.1) на входе т.е. реализуется правило формирования управляющим устройством управляющего воздействия на основании информации о воздействиях, и реакции системы на них[1]. Но перед запуском насоса, система управления (СУ) обращается к значениям датчика уровня 6 (рис.1) для того, чтобы проверить текущий уровень. В связи с технологическими особенностями необходимо выдерживать необходимый уровень в буферной емкости 1 (рис.1) на уровне 1,2-1,5 метра. Следствии чего пока не будет достигнут уровень требуемый, СУ не включит насос. По достижении требуемого уровня СУ включит насос на нужной расход. Задание по расходомеру 3, обратная связь – по расходомеру 4.
Рассмотрим второй случай. Приток стоков находиться в диапазоне 210 - 410 м3/ч. В данном случае недостаточно 1 насоса в работе. Необходимо задействовать 2 насоса. В данном случае можно найти 2 решения:
- 1 насос работает на 100% производительности, обеспечивая подачу 210 м3/ч, а второй на частотном преобразователе, обеспечивает производительность:
![]()
- Оба насоса работают на одинаковой производительности:
![]()
Во втором варианте поведение 2-х ПИ-регуляторов, работающих параллельно, может вносить автоколебания в систему. Поэтому целесообразно применить первый вариант управления.
Стоит также отметить, что применяемые насосные агрегаты не поддаются регулированию на производительности 0-5%. При задании ПИ- регулятором значения задания 0-5% СУ игнорирует задание, при этом реализует алгоритм подачи по уровню т.е. ожидает подъема жидкости до уровня 1,7 метра, после чего включает привод на 5%, и отключает по достижении уровня 1,5 метра.
Такой метод управления по двум параметрам (расход, уровень) одновременно широко применяется в промышленности [2].
Построенная система управления базируется на 3-х насосных агрегатов. В алгоритме управления возможно участие одного или двух насосов. Но как выбрать очередность запуска насосов? Для этой цели разработано 2 критерия.
Первый критерий. Подсчет мото-часов каждого насоса, работающего на 100% производительности). По данному алгоритму СУ запускает насос на 100% производительность.
Второй критерий. Подсчет мото-часов каждого насоса, работающего на частотном преобразователе по формуле:
![]()
где ТЧП – суммарное время мото-часов работы на ЧП,
Q – производительность ЧП во время работы в промежутке t
По данному критерию СУ запускает насосы на частотном управлении.
СУ подсчитывая в реальном времени оба критерия, запускает насосные агрегаты с учетом наименьшего коэффициента, тем самым обеспечивая равномерный износ оборудования, увеличивая надежность принятой системы управления.
Выводы:
- Применение адаптивных систем управления в сфере очистных сооружений дает преимущество перед обычными дискретными системами управления;
- Применение каскадного управления позволяет СУ контролировать не только подачу жидкости, но и поддерживать желаемый уровень в емкостях;
- Несмотря на сложность алгоритма управления, подобные системы управления обеспечивают высокий уровень надежности;
- Применение критерия запуска позволяет увеличить срок службы насосных агрегатов, обеспечивая высокий уровень отказоустойчивости.
Литература
- Нестеров А.В. Нестеров С.В. Теория автоматического управления. К: Изд. КубГТУ, 2004.С.11
- Регуляторы и схемы регулирования [Электронный ресурс] URL www.promserv.ru/information/92-2010-01-20-13-16-13.html (дата обращения 14.06.2015)
References
- Nesterov A.V. Nesterov S.V. Teoriia avtomaticheskogo upravleniia. K: Izd. KubGTU, 2004.S.11
- Reguliatory` i skhemy` regulirovaniia [E`lektronny`i` resurs] URL www.promserv.ru/information/92-2010-01-20-13-16-13.html (data obrashcheniia 14.06.2015)