Цифровой двойник лесного массива
Цифровой двойник лесного массива
Аннотация
Совершенствование управления лесным комплексом невозможно без наличия актуальной и достоверной информации о лесах. Давность лесоустройства на большей части территории лесного фонда превышает установленный ревизионный период. Современные объемы лесоустроительных работ не успевают обеспечить сокращения срока устаревания лесоустроительных материалов.
Решение проблемы обеспечения актуальной и достоверной информации о лесных ресурсах традиционными методами является невозможным в разумные сроки в силу высокой трудо- и финансовозатратности, отсутствия достаточных кадровых ресурсов. Улучшить показатели дешифрирования насаждений позволит внедрение новых методов дешифровочной таксации лесов, основанных на применении современных технологий сканирования земной поверхности. В рамках проведения различных работ в лесных массивах, отвечающих коммерческим и государственным интересам, требуется оценить характер и объем возможной вырубки лесных насаждений, так как это отвечает требованиям законодательства и имеет под собой логические основания. Отсюда исходит важность определение объёмов древесины на выбранном участке. Для того чтобы обеспечить лучший подход к выполнению подобной задачи, считается наиболее допустимым и эффективным использование дронов и систем мобильного наземного лазерного сканирования, которые могли бы с высокой точностью выполнить задачу определения и оценки видового разнообразия лесного массива. Данный подход в ходе работы был опробован на практике, что позволило подтвердить его эффективность. Применение лидарных систем сканирования является важным нововведением последнего времени, сама конструкция отработана на ряде примеров в отечественной практике и за рубежом.
Улучшению сейчас, в основном, подвергается техническая часть подбор оборудования для использования в лесном хозяйстве, (и иных отраслях где необходимы достоверные и очень точные пространственные измерения данных) при выполнении работ по отводу и таксации лесосек, закладка тренировочных полигонов при подготовительных работах (получение цифровых двойников тренировочных полигонов, лесосек), проверка качества лесоустроительных работ, определение объёмов заготовленной древесины на нижних и верхних складах. В этой работе речь идет о системе обработки, так как техническая часть не является значительной и не представляет научного интереса. В нашем случае обработка данных производилась специально обученной нейросетью, которая демонстрировала высокую результативность оценки, подтверждению более классическими методами, в том числе ручным пересчетом. Разработанный алгоритм позволяет эффективно работать с разными типами древостоев и эффективно отделять их от общей массы лесного массива, что позволяет не допустить уничтожение редких или не квотированных видов. В ходе исследования была получена цифровая модель местности.
1. Введение
Многие виды работ, связанные с эксплуатаций недр, а также так или иначе затрагивающих подземное пространство приводят к тому, что требуется воздействовать на сформировавшуюся в определённой местности экосистему, так или иначе наносить вред природному разнообразию. Несмотря на явный факт негативного воздействия, без него осуществить работы по прокладке коммуникаций или добычи полезных ископаемых невозможно. Речь идет только о снижении степени воздействия на экологию, создания наиболее благоприятных условий для проведения работ.
Оценка участка вырубки может быть полезна не только с научной, но и с коммерческой точки зрения. Таксацию обычно проводят специализированные организации, которые находятся в тесной связи с государством и имеют на это специальные разрешения.
За время развития этой науки сформировались конкретные методики, которые развивались и качественно изменились с момента появления первых практических изысканий в середине прошлого века
.Таксация является комплексным явлением, которая включает не только снимки местности, но и проведение изысканий ботанического характера, что требует наличия специалистов на участке проведения операции
. Но без возможности оперативно получить начальные сведения о составе лесного массива время проведения существенно увеличивается. После проведения изысканий обычно формируется таблица данных, в которую заносятся данные, характеризующие выделенный участок.При проведении оценки использовалось сочетание методик, не только ручной пересчет, но и высчитывание результатов при помощи нейросетей, что позволило сделать результат точнее, чем ранее полученный в той же местности, при только ручном пересчете. Важно указать на то, что несмотря на наличие справочных материалов касаемо той или иной местности, они не всегда отражают на практике реальное положение дел, что также является доводом в пользу того, что получение новых данных является актуальной задачей
. Собранные в реальных полевых условиях сведения стали основой для обучения нейросетевой модели, которая ускоряла обработку данных из-за наличия уже просчитанного шаблона, который наиболее подходит для описания участка. В результате, происходит скорее не формирование новой картины для местности, за счет добавления новых элементов, а скорее, исключение из нее не подходящих под конкретный участок.В рамках формирования объективных сводок все равно необходимо осуществление полевых работ с личным присутствием в выбранной зоне.
Кроме того, пока что нельзя отказаться от ручного пересчета и оценки характеристик деревьев.
В частности, фотографирование до сих пор осуществляется человеком, несмотря на то, что использование дронов сейчас происходит активнее.
Это свидетельствует о необходимости совершенствования систем лазерного сканирования, в условиях лесного массива, так как при передвижении на уровне стволов деревьев возможны инциденты, угрожающие целостности оборудования
. В случае высотного наблюдения, с позиции над кронами деревьев, дроны доказали свою эффективность и позволили усовершенствовать процесс пересчета за счет ускорения этой операции, а также позволили обнаружить ряд ошибок, которые были допущены при обработке данных с земли. Основным методом работы с лесным массивом является лазерное сканирование участка и формирование карты местности с учетом ее особенностей .В ходе данного исследования сканирование производилось с помощью квадрокопера DJI Matrice 350 RTK и портативной сканирующей системы LiGrip H300. Можно выделить еще приемник сигнала, позволяющий осуществлять управление в режиме реального времени, а также LiGrip – инструмент для сбора и анализа 3D данных в движении, работающий на основе технологии SLAM (Сбор данных и построение карты без сигнала GPS и марок), который позволил получить итоговую модель высокой точности. Кроме того, осуществлялась фотосъемка местности синхронизированной панорамной камерой Insta 360 One R. Lifuser BP позволяющей синхронизировать сразу три вида данных: облако точек, траекторию и видеоряд . Цифровая камера позволяет получать высококачественный фото-видео ряд для раскраски облика точек в реальные цвета объектов, анализа и удобного просмотра на всех этапах проекта. Движение дрона осуществилось на высоте 200 метров от крон деревьев, что позволило получить четкую картину и подробное представление о характере местности.
Для проверки эффективности системы методику было решено применить на тренировочно-дешифровочном пробном полигоне.
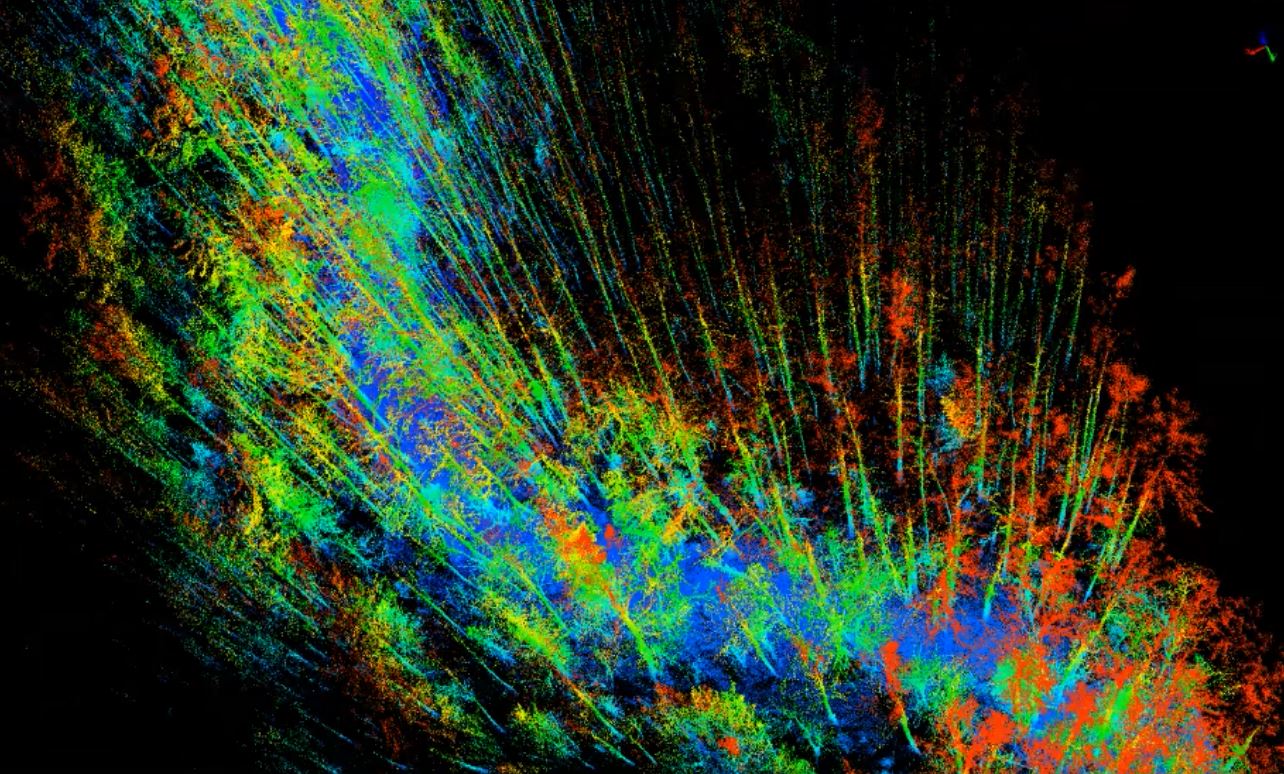
Рисунок 1 - Модель местности после 12 минут работы системы
Сплошной перечет деревьев позволяет получить реальные данные с большой степенью достоверности, что дает возможность получить базис для сравнения. Особенно важно на этом этапе получить точные сведения, так как иначе они не могут являться эталоном. Следующим этапом происходит непосредственно сбор данных при помощи беспилотника и портативной сканирующей системы LiGrip H300, создание цифровой модели, для последующего анализа и оценки насаждения. Отличительной особенностью сканирования при помощи беспилотника является тот факт, что это сканирование происходит быстрее. В случае проведения сканирования наземным методом, скорость передвижения составляет 3 км/ч, тогда как дрон с полезной нагрузкой в качестве сочетания Лидар+камера LiAir X3 позволяет осуществлять сканирование на скорости 6-7 км/ч. В процессе сканирования для оценки насаждения применяется метод создания модели за счет облака точек, а также анализ получившееся картины за счет сопоставления с существующей базой данных о насаждении.
В итоге, в ходе обработки данных была получена ведомость всех уникальных деревьев ТДПП с условными номерами, с основными таксационными характеристиками, координатами каждого ствола дерева. Помимо того, за счет применения новой модели удалось ускорить сбор данных, а также снизить получившийся объем массива данных, представляющих модель участка. Наземный перечет позволил получить данные для сопоставления, на основе которых была создана контрольная модель, в результате сопоставления с получившейся при использовании беспилотника и мобильной наземной сканирующей системы. Оценка качества происходит за счет прямого сопоставления моделей и анализа точек расхождения. За счет проведенной работы удалось заключить, что точность модели составляет 90%. В процессе доработки можно достичь еще больших успехов. Причинами отклонений между показателями могут быть: случайные ошибки при измерении наземным методом, человеческий фактор измерения высот, диаметров на больших площадях.
В целом, верификация результатов предлагаемой технологии показала, что ошибка при определении таксационных параметров не превышает нормативно допустимых пределов.
2. Основные результаты и обсуждение
Использование современных технологий позволило получить актуальные данные о местности. Технология продемонстрировала свою эффективность при повторной таксации на следующем участке в той же местности, за счет ускорения процесса составления плана и подсчета составляющих лесного массива. Использование материалов лидарной съемки в сочетании с мультиспектральной камерой высокого разрешения позволяет: Получать дополнительную информацию о лесных насаждениях; Повысить точность определения отдельных таксационных показателей в сочетании с другими наземными и дешифровочными способами; Повысить качество контурного дешифрирования; Автоматизировать измерение и расчет ряда таксационных показателей; Повысить точность и сократить процент ошибок за счет минимизации субъективных факторов; Проектировать хозяйственную деятельность на основе более точной информации о рельефе лесных участков.
Техническая составляющая исследования не требует доработки, за исключением камеры, так как более дорогая модель могла бы позволить получить более точные сведения касаемо характеристики участка и его видовом разнообразии. Сведения подобного характера пригодились бы экологам и другим ученым, заинтересованным в изучении экосистемы конкретного района. В заключение, можно констатировать преимущества технологии обеспечивают хорошие перспективы для ее применения в России.
3. Заключение
Обработанные данные воздушного лазерного сканирования позволяют говорить о создании «цифрового двойника леса». Это, в свою очередь, находит практическое применение в контроле за использованием лесных участков, планировании лесозаготовок, а также для планирования объектов лесной инфраструктуры; применение этой технологии возможно при сплошном перечете линейных объектов с использованием нескольких типов сканеров.