Optimizing the trajectory of a spacecraft using an ideally regulated engine in the vicinity of a circular orbit
Optimizing the trajectory of a spacecraft using an ideally regulated engine in the vicinity of a circular orbit
Abstract
The paper proposes the problem of optimizing the trajectory of a spacecraft using an ideally controlled engine in the vicinity of a circular orbit. New approaches to the problem of optimizing the trajectory of a spacecraft with an ideally controlled engine will be introduced in a different form for two- and three-channel control. The Hill-Clohessy-Wiltshire equations were used to describe the motion of the spacecraft in the vicinity of a circular orbit. The Pontryagin's maximum principle was applied to achieve optimal control. The results of the trajectory optimization problem for two- and three-channel control are compared. The new analytical results of trajectory optimization obtained can be useful as initial approximations when solving practical problems. The use of two-channel control is often due to the limited capabilities of the control system, the need to ensure radio communication conditions or mutual visibility of approaching spacecraft, and a number of other factors. Numerical examples of optimal trajectories are also given, taking into account the use of an ideally regulated engine in the vicinity of a circular orbit.
1. Introduction
Currently, the problems of optimizing the trajectories of spacecraft (SC) are one of the main areas of research in the field of celestial navigation and space mission planning. The problem of trajectory optimization is of particular interest of optimizing the trajectory for spacecraft with an ideally controlled engine capable of providing two and three channel control, especially in the vicinity of a circular orbit. Such systems require a systematic approach to planning and controlling maneuvers to achieve specified orbital parameters or perform a specific space mission. One important aspect of such planning is taking into account resource constraints and ensuring efficient use of fuel during maneuvers.
In the 60s, the use of electric rocket engines (ERE) in spacecraft began. Due to their high specific impulse, ERE can significantly reduce fuel consumption for orbital maneuvering. Despite the low thrust characteristic of ERE compared to traditional liquid rocket engines, their long-term operation has become possible. Electric propulsion with Low-thrust has been successfully used in various interplanetary missions. For an idealized mathematical model of electric propulsion, a model of an ideally regulated (IR) engine is used. Within the framework of this model, the reactive power of the IR engine is considered constant, although the thrust and exhaust velocity can vary arbitrarily , , . The mathematical model of the IR engine attracts attention with its relative simplicity of optimal control.
Optimal control of the relative motion of SC near circular orbits is crucial for various space missions, including rendezvous and docking, formation missions, deployment and maintenance of low-orbit systems for communications and Earth sensing, and missions between close orbits. Determining the appropriate control strategy is vital to ensure the transfer of the system from the initial state to the final state with minimal fuel consumption, which is essential for economic efficiency and the successful execution of space missions.
Minimizing fuel consumption is equivalent to minimizing a specific functional. To achieve this objective, various methods are employed, including those based on Pontryagin's maximum principle , Bellman's dynamic programming , the necessary optimality conditions of the theory of basis vectors , , , and the method of Lagrange multipliers , , . Additionally, optimization methods involve reducing the original optimization problem to a finite-dimensional parametric one , , , as well as employing more modern approaches such as genetic algorithms, evolutionary algorithms, and their combinations , , , .
The paper discusses the optimization problem of a trajectory with limited thrust for an ideally controlled engine using a method based on the Pontryagin maximum principle, which involves considering derivatives of a certain function. Solutions to this problem serve as initial approximations for numerically optimizing a trajectory with constant exhaust velocity and limited thrust . In the case of three-channel control, the thrust vector, determined by the three components of reactive acceleration, can be arbitrarily changed using the thrust amount and two orientation angles (pitch and yaw angles). On the other hand, the considered two-channel control, where the limitation occurs at a zero pitch angle, results in a zero radial component of the reactive acceleration.
The purpose of this paper is to optimize the control of spacecraft relative motion using an ideally regulated engine near a circular orbit to minimize overall fuel consumption. The author conducts a detailed analysis of two and three-channel control and proposes optimization methods to achieve optimal results under limited resource conditions. Additionally, the author examines the closed-form IR trajectory optimization problem with limited thrust for both two- and three-channel control. The closed-form solution to this problem serves as initial assumption values for the numerical optimization of a constant-velocity trajectory with limited exhaust velocity .
The study of such problems is crucial for improving navigation technologies and enhancing the efficiency of space missions within limited resources and time constraints. For instance, the use of two-channel control is often necessitated by the limited capabilities of the control system, the need to ensure radio communication conditions or mutual visibility of approaching spacecraft, and various other factors.
To analyze the relative motion of SC near circular orbits, the development of special mathematical models of motion is required. One of the most common mathematical models of relative motion in the vicinity of circular orbits is the Hill-Clohessy-Wiltshire (HCW) model , . In this mathematical model, an orbital coordinate system is used to obtain equations of relative motion, and the linearization of differential equations of relative motion is based on the assumption that the distance between the analyzed SC is small compared to the average orbital radius.
2. Main results
2.1. Formulation of the problem
There are known initial and final phase vectors of the relative motion of a SC with an ideally regulated engine in the vicinity of a given circular orbit:
2.2. Optimizing the control of an ideally regulated engine
Let us consider the motion of the SC relative to point O, which moves around the Earth in an unperturbed circular orbit with a certain radius r0. For convenience, we introduce a coordinate system where the x axis coincides with the direction of the radius vector of point O, the y axis is in the transversal direction, and the z axis complements the coordinate system to the right. In this coordinate system, the HCW equations in dimensionless variables take the following form:
where t – time; x, y, z – spacecraft coordinates; vx, vy, vz – components of the spacecraft velocity vector; ax, ay, az – components of the reactive acceleration vector.
It is required to transfer system (1) from a given initial position to t = 0:
to the final position specified at a fixed time
with minimal fuel consumption.
2.3. Minimizing fuel mass
The problem of minimizing the fuel mass is equivalent to the problem of minimizing the functional :
where
Separation into two independent subproblems becomes possible for the motion of the spacecraft: in the orbital plane and along the z axis. Thus, motion in the orbital plane and outside it can be described by a system of differential equations:
With functionals
where
Boundary conditions, taking into account (2), (3), can be written as:
We can write the Pontryagin function for both subproblems as:
where the vector p represents the conjugate variables. According to the maximum principle, the optimal control is determined by maximizing the Hamiltonian with respect to the control variable a. Thus, we obtain an expression for optimal control in the following form:
we substitute (9) into (8) and obtain the Hamiltonian
The system of differential equations describing the optimal motion and corresponding to the Hamiltonian (10) takes the following form:
The solution to system (11) has the form:
where Ф(t) – fundamental matrix of a homogeneous system
To solve the optimal control problem, it is necessary to determine the value of p0 at which the boundary conditions (7a) and (7b) are satisfied. It is clear that from (13) the optimal solution can be derived in the following form:
where p0z is the initial value of the vector of conjugate variables for motion along the normal to the plane of the reference orbit, at t = 0.
Matrices Ф and Г are calculated analytically, also introducing the notation c = cost, s = sint, we obtain:
for three-channel control and,
for two-channel control,
After determining the initial vector of conjugate variables according to formulas (15), the optimal trajectory is calculated using expression (13), and the optimal control is determined using expression (12) and expression (15). The total characteristic velocity and total costs are then determined.
3. Numerical examples
Let us consider the motion of the spacecraft relative to point O, moving in an undisturbed near-Earth circular orbit with a radius of 6871 km. Let us take the gravitational parameter of the Earth equal to 3.9860044*1014 m3/s2. Let us consider the problem of flying in
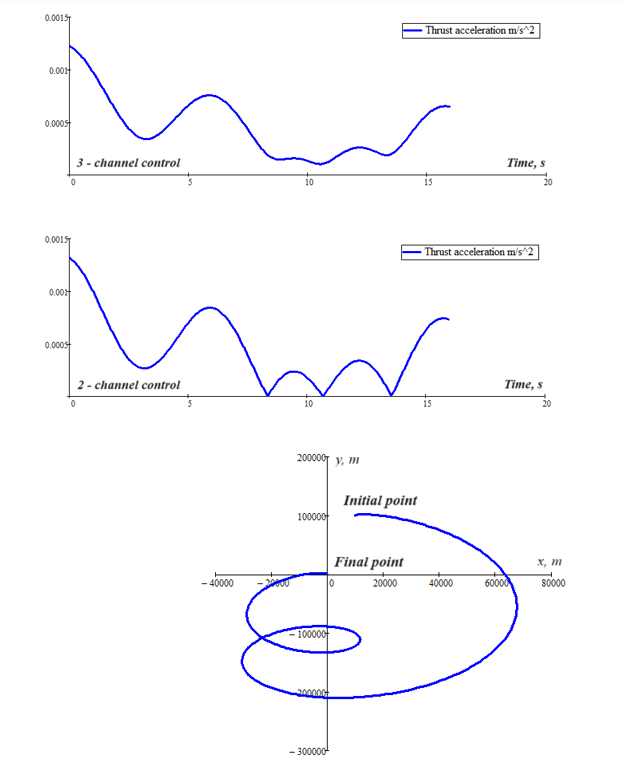
Figure 1 - Optimal IR trajectory and time dependence of reactive acceleration for three and two-channel control
Note that time and velocity impulse components are represented in dimensionless variables. To enter a specific unit of measurement, you need to multiply them by “scaleT = 902.113s”, and by “scaleV = V0”, where V0 is the velocity of movement in a circular orbit.
Table 1 - Results of calculating the components of velocity impulses for two and three-channel control
t | ∆Vx2 * 10-3 | ∆Vy2 * 10-3 | ∆Vz2 * 10-3 | ∆Vx3 * 10-3 | ∆Vy3 * 10-3 | ∆Vz3 * 10-3 |
0 | -0.131 | 1.313 | 0.394 | -0.131 | 1.313 | 0.394 |
1.064 | 4.784 | -5.948 | 0.751 | 4.731 | -5.799 | 0.751 |
2.128 | 2.807 | -16 | 0.333 | 2.781 | -16 | 0.333 |
3.192 | -3.1 | -16 | -0.345 | -3.054 | -16 | -0.345 |
4.256 | -6.443 | -5.41 | -0.583 | -6.361 | -5.462 | -0.583 |
5.32 | -4.132 | 6.083 | -0.224 | -4.082 | 5.909 | -0.224 |
6.384 | 0.874 | 8.647 | 0.28 | 0.872 | 8.526 | 0.28 |
7.448 | 3.425 | 2.606 | 0.415 | 3.377 | 2.625 | 0.415 |
8.512 | 1.596 | -3.556 | 0.13 | 1.574 | -3.477 | 0.13 |
9.576 | -1.806 | -3.026 | 0.0372 | -1.78 | -3.032 | 0.0372 |
10.64 | -2.942 | 2.788 | -0.2465 | -2.9 | 2.646 | -0.2465 |
11.704 | -1.046 | 7.247 | -0.051 | -1.031 | 7.066 | -0.051 |
12.768 | 1.385 | 6.358 | 0.107 | 1.359 | 6.272 | 0.107 |
13.832 | 1.901 | 2.347 | 0.0797 | 1.861 | 2.386 | 0.0797 |
14.896 | 0.749 | -0.191 | -0.0126 | 0.727 | -0.121 | -0.0126 |
15.963 | 1.687* 10-7 | 3.514* 10-4 | -3.358* 10-5 | 6.614* 10-6 | 3.111* 10-4 | -3.358* 10-5 |
Table 2 shows the results of calculating the magnitudes of velocity impulses and fuel consumption in the time range from 0 to 15.963 (in dimensionless variables). These data make it possible to evaluate the necessary maneuvers to achieve the required trajectory using fuel.
Table 2 - Results of calculating the magnitudes of velocity impulses and fuel consumption
t | ∆V2, m/s | m2, kg | ∆V3, m/s | m3, kg |
0 | 10.488 | 4.848 | 10.488 | 4.848 |
1.064 | 58.42 | 26.706 | 57.292 | 26.197 |
2.128 | 123.535 | 55.633 | 121.697 | 54.828 |
3.192 | 125.168 | 56.347 | 123.988 | 55.831 |
4.256 | 64.238 | 29.326 | 64.015 | 29.226 |
5.32 | 56.033 | 25.629 | 54.727 | 25.039 |
6.384 | 66.243 | 30.228 | 65.314 | 29.81 |
7.448 | 32.93 | 15.142 | 32.735 | 15.053 |
8.512 | 29.706 | 13.67 | 29.086 | 13.386 |
9.576 | 26.879 | 12.377 | 26.827 | 12.353 |
10.64 | 30.929 | 14.229 | 29.957 | 13.785 |
11.704 | 55.771 | 25.511 | 54.391 | 24.887 |
12.768 | 49.57 | 22.706 | 48.889 | 22.398 |
13.832 | 23.014 | 10.607 | 23.057 | 10.626 |
14.896 | 5.891 | 2.726 | 5.613 | 2.597 |
15.963 | 0.0027 | 0.00125 | 0.0024 | 0.00111 |
From Table 2, it is evident that, based on the required fuel consumption, two-channel control proves to be highly efficient and nearly indistinguishable from three-channel control. Notably, for two-channel control, at time t=0 s, the maneuver is 10.488 m/s with a fuel consumption of 4.848 kg, at t = 14400 s, the rendezvous maneuver reduces to 0.0027 m/s, resulting in minimal fuel consumption of only 0.00125 kg. On the other hand, for three-channel control, at t = 0 s, the maneuver is 10.488 m/s with a fuel consumption of 4.848 kg, at t=14400 s, the rendezvous maneuver decreases to 0.0024 m/s, and the fuel consumption reaches a minimal value of only 0.00111 kg.
To validate the obtained analytical solution, the analytical trajectory optimization results were compared with those obtained through numerical solution of the corresponding boundary value problem using the maximum principle. For the numerical solution, a continuous continuation method with respect to a parameter was employed, similar to the approach proposed in , with an initial approximation of zero for the unknown initial values of the conjugate variables. The verification process demonstrated the agreement between the analytical and numerical results, with any discrepancies attributed to numerical errors in solving the boundary value problem associated with the maximum principle.
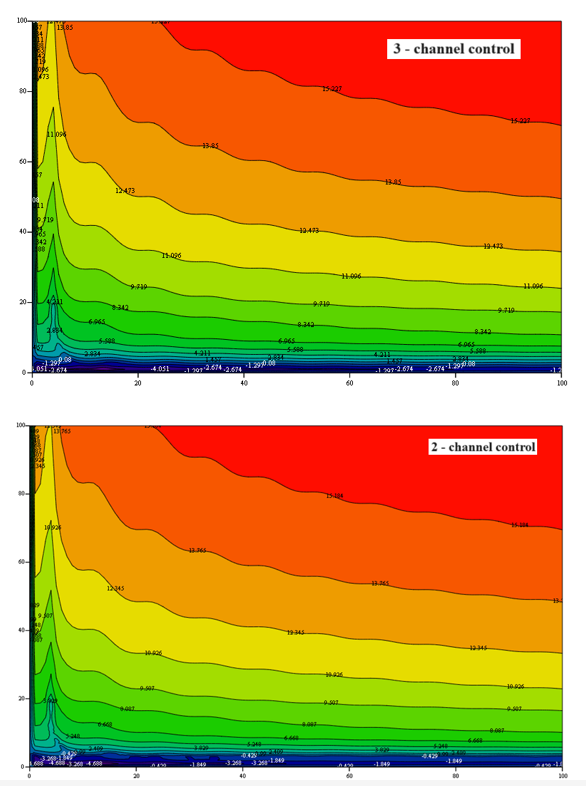
Figure 2 - Dependences of the functionality on the start time of the maneuver and the duration of the maneuver for the cases of two and three-channel control
4. Conclusion
The paper considers the problem of optimizing the trajectory of a spacecraft using an ideally regulated engine in the vicinity of a circular orbit. The problem of flying to a given point, velocity and fixed time is considered. Statements of the optimal control problem for the cases of two and three-channel control are presented. With two-channel control, there is a limitation on the direction of the thrust vector, and the radial component of the thrust is zero. The problems of minimizing fuel consumption for the limited power of a spacecraft propulsion system are considered. For this problem, an analytical solution was obtained in explicit form, which can be used as an initial approximation for solving many practical problems. When the engine runs almost continuously, three-channel control can reduce fuel costs by almost 5% compared to two-channel control. Thus, from the perspective of required fuel consumption, two-channel control becomes practically indistinguishable from three-channel control when maneuvering above 2 mm/s. Optimal control with two-channel control turns out to be extremely important due to its frequent use due to control system limitations, the need to ensure radio communication or mutual visibility of approaching spacecraft, and other factors.