ИСПОЛЬЗОВАНИЕ ДАННЫХ ГНСС-СЕРВЕРА ДЛЯ СИНТЕЗА ТИПИЧНЫХ ЕЗДОВЫХ ЦИКЛОВ
ИСПОЛЬЗОВАНИЕ ДАННЫХ ГНСС-СЕРВЕРА ДЛЯ СИНТЕЗА ТИПИЧНЫХ ЕЗДОВЫХ ЦИКЛОВ
Аннотация
Важное значение на автомобильном транспорте имеют стандартные или типичные ездовые циклы. Ездовой цикл, максимально точно соответствующий реальным условиям движения (типичный), позволяет объективно оценить такие эксплуатационные характеристики как средняя скорость движения, расход топлива, выбросы вредных веществ, уровень шума и т.д. Они используются для оценки экологической и экономической эффективности транспортных средств и специальной техники. Для получения объективного типичного ездового цикла необходимо проведение длительных пробеговых испытаний.
В работе предложена методика использования для синтеза ездового цикла базы данных онлайн-мониторинга с постобработкой в мобильном приложении Stamm 4.2.
1. Введение
ГНСС (Глобальная навигационная спутниковая система) или GNSS (Global Navigation Satellite System) в настоящее время повсеместно используется на транспорте для определения текущих координат подвижного состава, однако наиболее эффективно ее использование в комбинации с так называемыми ГНСС(GNSS)-серверами для решения различных задач, например, для отслеживания местоположения транспортных средств или для мониторинга работы сельскохозяйственной техники. В таких случаях данные о местоположении объектов передаются на серверы, где их можно обработать и использовать для принятия управленческих решений.
ГНСС-серверы могут выполнять следующие функции:
- Получение данных о местоположении объектов с помощью ГНСС-приемников;
- Обработка и анализ данных о местоположении;
- Хранение данных о местоположении в базе данных;
- Предоставление доступа к данным через интернет;
- Использование данных для принятия управленческих решений.
База данных координат транспортных средств и их скорости с привязкой к текущему времени может быть выгружена с WEB-сервера в виде настраиваемых отчетов. Скоростные профили, соответствующие заданным условиям, например, типу автомобиля, времени суток и т.п. могут быть использованы как статистический материал для последующего синтеза типичного ездового цикла.
Синтетические ездовые циклы, полученные на основе статистического материала, собранного в результате эксплуатации автомобилей в заданных условиях, находят широкое применение при оценке эксплуатационных, экологических и иных свойств подвижного состава , . С их помощью можно определить среднюю скорость и производительность автомобилей в заданных условиях. Следует учесть, что если использовать немодальные ездовые циклы, полученные путем непосредственных измерения, то они будут воспроизводить условия движения для конкретного города, улицы, времени суток и не могут служить объективным средством контроля. Таким образом, создание синтетических циклов, отражающих типичные условия эксплуатации является актуальной проблемой. Анализ литературных источников , ,
показал, что синтез ездового цикла требуют длительных пробеговых испытаний.В соответствии с этим целью исследования является сокращение времени получения типичного ездового цикла. А задачами будут:
- выбор метода сокращения срока и трудоемкости сбора экспериментальных данных;
- обоснование методик обработки собранного материала, для формирования базы данных скоростных профилей.
2. Алгоритм синтеза типичного ездового цикла
Исследования, посвященные разработке ездовых циклов автомобилей, не так широко представлены, по сравнению с другими направлениями научной деятельности на транспорте , , , , тем не менее имеющаяся в распоряжении автора информация позволила разработать следующий алгоритм получения синтетического цикла (рис. 1).
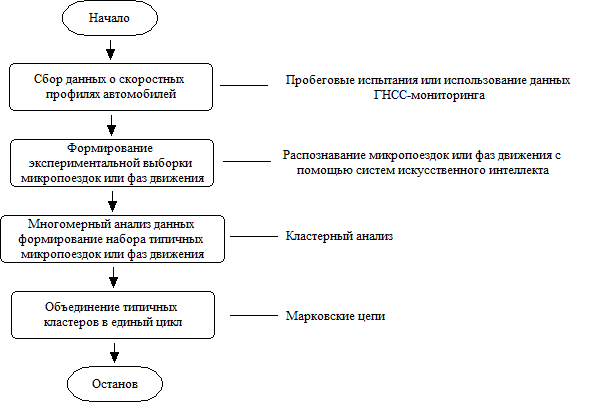
Рисунок 1 - Схема получения искусственного типичного цикла движения автомобиля
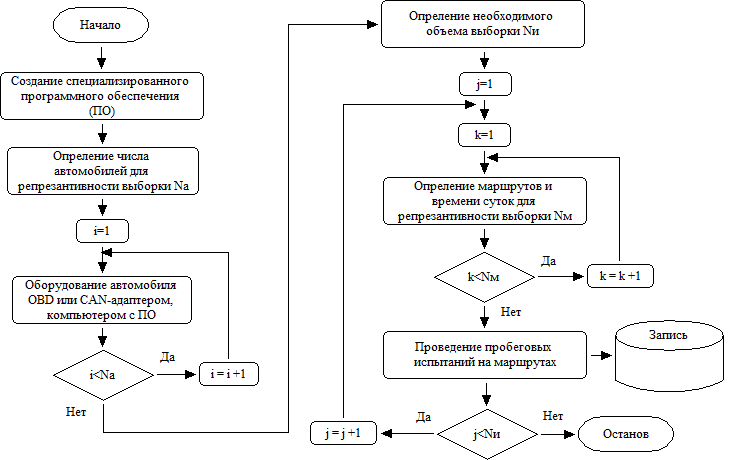
Рисунок 2 - Накопление репрезентативной выборки для синтеза ездового цикла при пробеговых испытаниях
Следующим этапом является формирование кластеров. Необходимо сформировать кластеры, объединяющие схожие фазы движения или микропоездки. Для этого можно использовать алгоритмы кластерного анализа, такие как k-means или иерархический кластерный анализ.
На последнем этапе, полученные кластеры объединяют в единый ездовой цикл на основе цепей Маркова.
При экспериментальных исследованиях по схеме представленной на рис. 2 обычно используются датчики скорости автомобиля, установленные на колесах. Доступ к ним обычно осуществляется через интерфейсы автомобиля, например, OBD-2. При этом приходится оборудовать подконтрольные автомобили специальным адаптером
, , , а также использовать ноутбук или микрокомпьютер, сопряженные с адаптерами OBD-2. То есть первый этап получения ездового цикла в этом случае очень затратный как по ресурсам, так и по времени.Гораздо эффективней воспользоваться базой данных о значениях скорости автомобилей, накапливаемой программным обеспечением ГНСС-мониторинга на WEB-серверах (рис. 3).
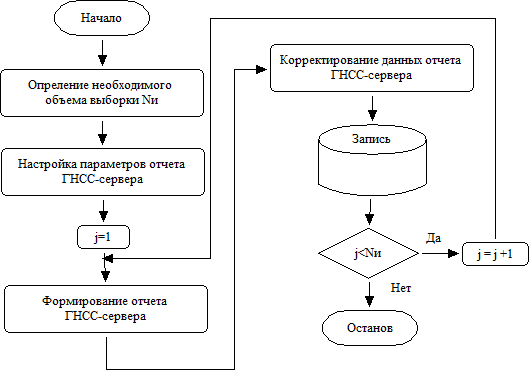
Рисунок 3 - Накопление репрезентативной выборки для синтеза ездового цикла при использовании данных ГНСС-сервера
3. Использование отчетов сервера ГНСС
Типичный ГНСС-сервер позволяет произвольно настраивать фильтры для отбора данных в отчет. Например, для формирования отчета могут быть выбраны конкретные автомобили, работающие на определенных маршрутах. Это дает возможность сформировать базу данных скоростных профилей для дальнейшего синтеза ездового цикла. Для этого можно создать шаблон отчета с необходимыми данными (рис. 4).
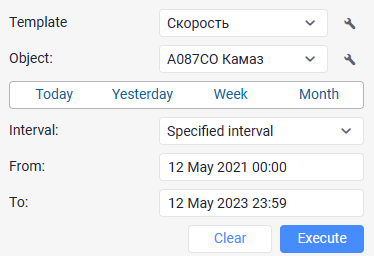
Рисунок 4 - Шаблон для отбора данных с ГНСС-сервера
Как и любая другая технология, ГНСС-сервер может иметь ошибки в определении скорости. Некоторые из них могут быть вызваны следующими причинами:
1. Недостаточная точность сигнала от спутника;
2. Погрешности в определении скорости при обработке сигналов, полученных от спутников;
3. Неисправности в оборудовании, что бывает достаточно редко;
4. Воздействие внешних факторов: некоторые внешние факторы, такие как электромагнитные помехи или погодные условия, могут повлиять на точность определения скорости;
5. Неправильная калибровка при регистрации оборудования на сервере.
Известно, что допустимая погрешность в определении координат ГЛОНАСС составляет 2-6 метров, у GPS – 2-4 метра. Но это в случае оптимальных условий и видимости, как минимум 4 спутников. В большинстве случаев она гораздо ниже. Кроме того, для оптимизации использования ресурсов ГНСС-сервера при онлайн-мониторинге используются специальные алгоритмы, которые позволяют определить минимально необходимое количество хранимых данных для достижения требуемой точности и функциональности системы. Например, при длительной стоянке или движении транспортного средства с постоянной скоростью, период обновления данных значительно увеличивается.
Перечисленные факторы затрудняют использование данных мониторинга с помощью ГНСС-серверов для синтеза ездовых циклов. Ошибки в определении координат и алгоритмы оптимизации дискового пространства сервера приводят к искажению скоростного профиля, полученного с помощью выгрузки отчета (рис. 5).
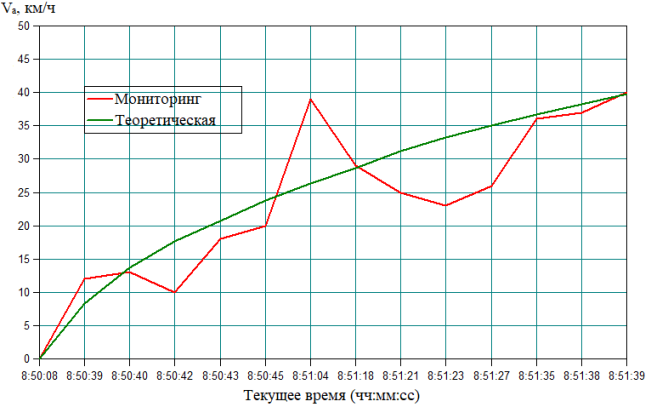
Рисунок 5 - Ошибки измерений скорости ГНСС-сервером
4. Корректирование данных отчетов ГНСС-сервера
Для обеспечения выполнения всех этапов синтеза цикла, рассмотренных выше, полученные данные необходимо подвергнуть дополнительной обработке. Один из вариантов, заключается в использовании обучаемой нейронной сети на этапе распознавания составляющих ездового цикла . Более простым вариантом является исправление некорректных данных. Это можно сделать с помощью применения цифровых фильтров к исходной выборке.
Для корректирования искаженных данных с помощью цифрового фильтра можно использовать разработанное автором приложение Stamm 4.2 , . Исходные данные располагаются произвольным образом на листе рабочей книги программы, панель настройки цифрового фильтра вызывается с помощью панели инструментов и меню приложения (рис. 6). После выбора диапазона корректируемых данных и параметров фильтра применение фильтра активируется нажатием кнопки «OK», при этом исправленные данные располагаются радом, напротив соответствующих значений исходной выборки. После этого можно в этой же программе визуально оценить изменения (рис. 7).
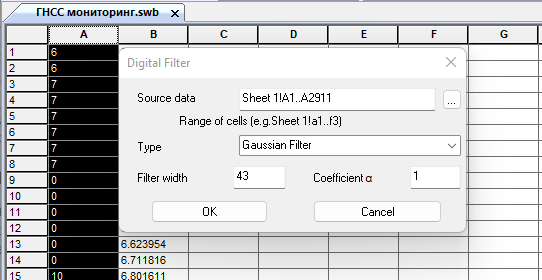
Рисунок 6 - Панель настройки цифрового фильтра Stamm 4.2
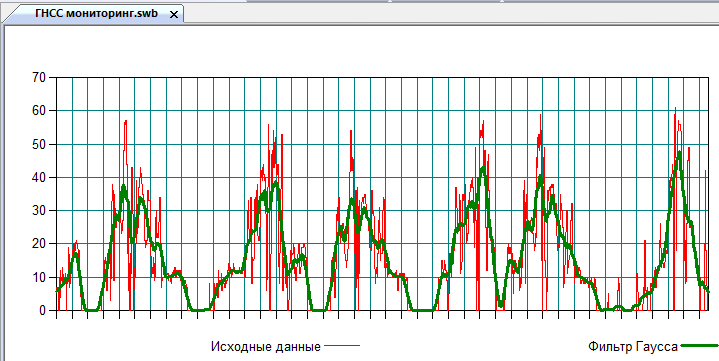
Рисунок 7 - Обработка данных цифровым фильтром Гаусса
5. Заключение
Таким образом, в процессе синтеза ездовых циклов на основе в исходных данных, полученных с ГНСС-сервера, предлагается использовать цифровые фильтры. Применение фильтров перед выполнением операции распознавания отдельных фаз движения или микропоездок существенно повышает надежность ее выполнения и достоверность результатов, а кроме того, повышает скорость обработки, уменьшая вероятность выделения «ложных» составляющих движения автомобиля. Необходимо отметить, что ранее обработка данных мониторинга с помощью цифровых фильтров не предлагалась.