ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ ПРИ ПЕРЕМЕШИВАНИИ СЫПУЧИХ СМЕСЕЙ

Подгорный Ю.И.1, Мартынова Т.Г.2, Скиба В.Ю.3, Косилов А.С.4, Печоркина Н.С.5
1Доктор технических наук, профессор, 2Кандидат технических наук, 3ORCID: 0000-0002-8242-2295, Кандидат технических наук, доцент, 4студент, 5студент, Новосибирский государственный технический университет
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ ПРИ ПЕРЕМЕШИВАНИИ СЫПУЧИХ СМЕСЕЙ
Аннотация
В процессе перемешивания сыпучих смесей могут образовываться «мертвые» зоны. Одним из способов ликвидации таких зон является сообщение рабочему органу смесителя дополнительного возвратно-поступательного движения. В работе представлено обоснование выбора механизма привода возвратно-поступательного движения рабочего органа экспериментальной установки смесителя. Приведены схемы и расчеты конструктивных параметров четырех рычажных механизмов, позволяющих получить перемещение выходного звена в пределах заданного хода вдоль оси x. Обоснован выбор эксцентриково-рычажного механизма.
Ключевые слова: группы Ассура, рычажный механизм, геометрический синтез, кинематический анализ.
Podgornyj Yu.I.1, Martynova T.G.2, Skeeba V.Yu.3, Kosilov A.S.4, Pechorkina N.S.5
1PhD in Engineering, Professor, 2PhD in Engineering, 3ORCID: 0000-0002-8242-2295, PhD in Engineering, Associate professor, 4Student, 5Student, Novosibirsk State Technical University
DETERMINATION OF KINEMATIC PARAMETERS OF THE EXPERIMENTAL ASSEMBLY AT MIXING OF LOOSE MIXTURES
Abstract
During the mixing of loose mixtures, the so-called "dead" zones can appear. One of the ways to eliminate such zones is to coerce the working body of a mixer with additional reciprocating motion. The paper presents the substantiation of the choice of the mechanism for reciprocating motion actuating device of the working body in the mixer experimental assembly. The schemes and calculations of the design parameters of the four lever mechanisms are given, they allow to obtain the displacement of the output link within the specified stroke along the X axis. The choice of the eccentric-lever mechanism is justified.
Keywords: Assur group, lever mechanism, geometric synthesis, kinematic analysis.
Введение
В настоящее время выпускается большое количество многокомпонентных сыпучих смесей для их применения в различных отраслях промышленности, строительства и сельского хозяйства. Процесс смешивания зависит от конструкции смесителя и заключается в выравнивании концентраций каждого из компонентов по всему объему рабочей камеры с образованием однородной смеси [1-6].
Наибольшее распространение получили следующие способы: механические (движущимися лопастями; вращающейся рабочей камерой смесителя; пропусканием массы через сопла); пневматические и гидравлические (сжатым воздухом; паром; жидкостью); импульсные (вибрацией; ультразвуком). Наиболее простым способом перемешивания является механический [7-9].
Чаще всего механическое перемешивание осуществляется в смесителях с помощью лопастных рабочих органов, которым сообщается вращательное движение либо непосредственно от электродвигателя, либо через передаточный механизм. При постоянной скорости их вращения могут образовываться «мертвые» зоны, т.е. некоторая часть смеси оказывается не перемешанной, что ухудшает качество продукта. Одним из способов ликвидации такого явления может служить применение дополнительного возвратно-поступательного движения рабочих органов.
В связи с тем, что проведение экспериментальных исследований смесителя в условиях производства не представляется возможным, необходимо было создать экспериментальную установку.
Целью данной работы является выбор механизма привода возвратно-поступательного движения рабочего органа экспериментальной установки смесителя. В связи с чем были решены следующие задачи: произведен выбор отдельных групп Ассура, позволивший синтезировать четыре вида механизмов. По результатам синтеза осуществлен выбор наиболее рациональной схемы механизма, для которой проведен кинематический анализ.
Теория
Анализ литературных источников указывает на то, что наиболее простыми и надежными являются рычажные механизмы, которые предлагаются для исследования и применения в конструкции экспериментальной установки смесителя [10-14].
Для выбора кинематической схемы был рассмотрен ряд структурных групп Ассура 2-го класса 1-го, 2-го и 3-го видов [13]. Из всего многообразия исследованных механизмов были выбраны четыре наиболее простые схемы: кривошипно-ползунный, четырехзвенный, кулисный и эксцентриково-кулисный (рис. 1–4).
Они позволяют получить перемещение выходного звена в пределах заданного хода вдоль оси x.
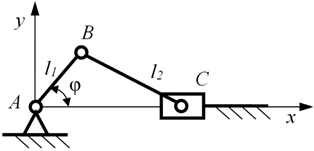
Рис. 1 – Структурная схема кривошипно-ползунного механизма
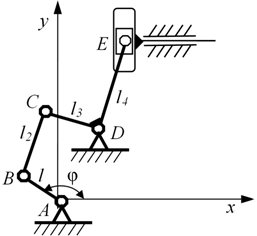
Рис. 2 – Структурная схема четырехзвенного механизма
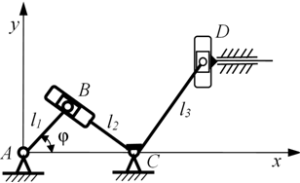
Рис. 3 – Структурная схема кулисного механизма
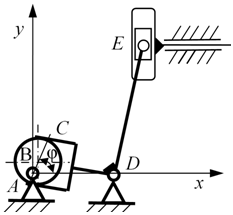
Рис. 4 – Структурная схема эксцентриково-рычажного механизма
Результаты и обсуждение
Для определения конструктивных параметров выбранных механизмов проводился геометрический синтез для каждого из низ.
Кривошипно-ползунный механизм (рис. 1).
На основании структурной схемы (рис. 5) и с учетом хода конечного звена (СС1), была определена длина кривошипа, которая составила 0,030 м. Размер шатуна, равный 0,080 м, определялся, исходя из конструктивных соображений и из условия существования механизма AB≤BC .
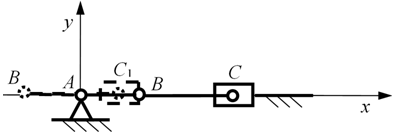
Рис. 5 – Расчетная схема для кривошипно-ползунного механизма
Четырехзвенный механизм (рис. 2)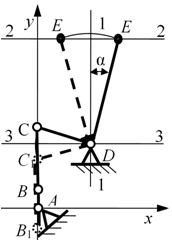
Рис. 6 – Расчетная схема для четырехзвенного механизма
Синтез четырехзвенного механизма выполнялся на основании хода звена DE и передаточного отношения рычагов CD/DE =1/2 (рис. 6).
Из треугольника DEE1 был определен угол α в соответствии с выражением
![]()
его значение составило α=0,145 рад.
На основании конструктивных соображений размер шатуна был принят 0,103 м в соответствии с условием существования четырехзвенного механизма:
AB<BC<CD<AD; AB+AD≤BC+CD. Кулисный механизм (рис. 3).На рисунке 7 представлена расчетная схема кулисного механизма в соответствии с которой проведен его синтез с учетом перемещения ведомого звена и передаточного отношения (ВС/СD).
В результате проведенного синтеза был определен угол α по выражения:
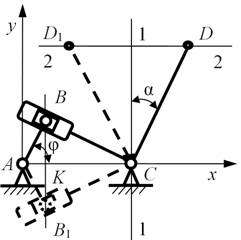
Рис. 7 – Расчетная схема кулисного механизма
![]() , он составил 0,145 рад.
, он составил 0,145 рад.
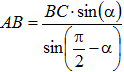 Из треугольника АВС в соответствии с выражением:
Из треугольника АВС в соответствии с выражением:
Эксцентриково-рычажный механизм (рис. 4).
Эксцентриково-рычажный механизм синтезирован на основании схемы, приведенной на рисунке 8 в соответствии с ходом конечного звена и передаточного отношения рычагов (CD/DE).
Угол α, равный 0,145 рад, был определен из треугольника DЕЕ1 по формуле:
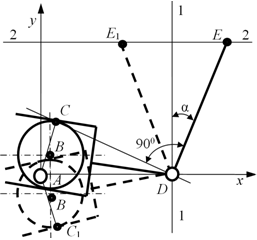
Рис. 8 – Расчетная схема эксцентриково-рычажного механизма
![]()
Расстояние АD и АС определялись из треугольника ACD в соответствии с выражениями:
 и составили 0,105 м и 0,015 м соответственно, а радиус составил 0,00766 м.
и составили 0,105 м и 0,015 м соответственно, а радиус составил 0,00766 м.
По результатам структурно-геометрического синтеза (таблица 1). определено, что наименьшими габаритными размерами обладает кривошипно-ползунный механизм, но он неприемлем по конструктивным соображениям, а четырехзвенный механизм – из-за своих габаритов. Одинаковые габариты имеют кулисный и эксцентриковый механизмы, но в состав последнего входят как низшие, так и высшие пары. С учетом вышеизложенного был выбран эксцентриково-рычажный механизм.
Таблица 1 – Результаты структурно-геометрического синтеза
| № п/п | Наименование механизмов | Максимальные значения геометрических параметров, м | Число подвижных звеньев | |
| Габаритный размер по оси X | Габаритный размер по оси Y | |||
| 1. | Кривошипно-ползунный | 0,11 | 0,03 | 3 |
| 2. | Четырехзвенный | 0,148 | 0,244 | 3 |
| 3. | Кулисный | 0,135 | 0,208 | 3 |
| 4. | Эксцентриково-рычажный | 0,135 | 0,208 | 2 |
Кинематический анализ эксцентриково-рычажного механизма заключался в определении перемещения, скорости и ускорения конечного звена (точки Е).
Радиус-вектор эксцентрика рассчитывался в соответствии с выражением:
![]()
где r – радиус-вектор эксцентрика; a – радиус эксцентрика; е – эксцентриситет; φ – угол поворота эксцентрика.
В соответствии со схемой механизма (рис. 8), а = ВС; е = АВ.
Угол поворота коромысла ВСD определялся из выражения:
![]()
Определение перемещений, скоростей и ускорений точки Е осуществлялось в пакете MathCAD, результаты представлены на рисунке 9.
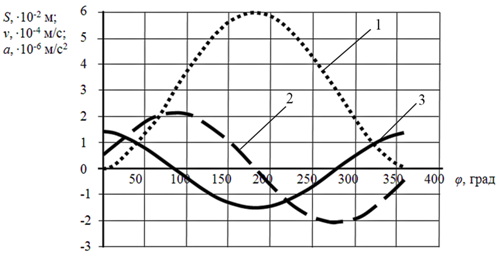
Рис. 9 – Кинематические параметры возвратно-поступательного движения рабочего органа экспериментальной установки смесителя: 1 – перемещение точки Е, (S), м; 2 – скорость перемещения точки Е (V), м/c; 3 – ускорение точки Е (a), м/c2
Выводы
- Произведен выбор структурных групп Ассура 2-го класса 1-го, 2-го и 3-го видов, позволивший провести синтез четырех видов механизмов: кривошипно-ползунного, четырехзвенного, кулисного и эксцентриково-рычажного.
- Проведен геометрический синтез вышеуказанных механизмов, в результате которого были определены их габаритные размеры при крайних положениях конечного звена:
- кривошипно-ползунный: по оси x составляют 0,110 м, а по оси y – 0,030 м.
- четырехзвенный: по оси x – 0,134 м, по оси y – 0,311 м.
- кулисный: по оси x – 0,135 м, а по оси y – 0,208 м.
- эксцентриково-рычажный: по оси x – 0,135 м, а по оси y – 0,208 м.
- В результате структурно-геометрического синтеза и кинематического анализа для сообщения возвратно-поступательного движения выбран эксцентриково-рычажный механизм. Преимущество такого конструктивного решения заключается в уменьшении количества звеньев в кинематической цепи, что снижает потери на трение, упрощает изготовление, а, следовательно, уменьшает стоимость изделия.
Список литературы / References
- Подгорный Ю. И. Методика уравновешивания роторов технологических машин / Ю.И. Подгорный, Т.Г. Мартынова, В.Ю. Скиба, Д.В. Лобанов, А.А. Жирова, А.Н. Бредихина, А.С. Косилов, Н.С. Печоркина // Обработка металлов (технология, оборудование, инструменты). - 2016. - № 2 (71). - С. 41-50.
- Мартынова Т. Г. Экспериментальные исследования нагрузочных характеристик смесителя / Т.Г. Мартынова, Ю.И. Подгорный, С.В. Птицын // Научный вестник Новосибирского государственного технического университета. - 2011. - № 2. - С. 183-188.
- Подгорный Ю. И. Определение основных параметров технологического оборудования / Ю.И. Подгорный, Т.Г. Мартынова, В.Ю. Скиба, В.Н. Пушнин, Н.В. Вахрушев, Д.Ю. Корнев, Е.К. Зайцев // Обработка металлов (технология, оборудование, инструменты). - 2013. - № 3 (60). - С. 68-73.
- Мартынова Т. Г. Исследование уравновешенности рабочего вала мешалки непрерывного действия / Т.Г. Мартынова, Ю.И. Подгорный // Сборник научных трудов НГТУ. - 2008. - № 2 (52). - С. 41-46.
- Подгорный Ю. И. Уравновешивание роторов технологических машин / Ю.И. Подгорный, Т.Г. Мартынова, А.Н. Бредихина, А.С. Косилов, Н.С. Печоркина // Актуальные проблемы в машиностроении. - 2015. - № 2. - С. 256-262.
- Подгорный Ю. И. Влияние точности изготовления элементов ротора на его уравновешенность / Ю.И. Подгорный, В.Ю. Скиба, Т.Г. Мартынова, А.С. Косилов // Международный научно-исследовательский журнал. - 2016. - № 6-2 (48). - С. 119-123.
- Подгорный Ю. И. Влияние точности изготовления месильных лопаток на уравновешенность рабочего вала смесителя непрерывного действия / Ю.И. Подгорный, Т.Г. Мартынова // Научный вестник Новосибирского государственного технического университета. - 2010. - № 3. - С. 119-126.
- Мартынова Т. Г. Исследование неустановившегося движения двухвального смесителя непрерывного действия / Т.Г. Мартынова, Ю.И. Подгорный, В.Ю. Скиба, И.С. Захарченко, П.Ю. Скиба // Международный научно-исследовательский журнал. - 2016. - № 9-2 (51). - С. 61-65.
- Подгорный Ю. И. Исследование состояния автоматической линии по выработке макаронных изделий BRAIBANTI на ОАО "Новосибирская макаронная фабрика" / Ю.И. Подгорный, С.В. Птицын, Т.Г. Мартынова // Сборник научных трудов Новосибирского государственного технического университета. - 2004. - № 1. - С. 15-18.
- Подгорный Ю. И. Определение жесткостных характеристик и энергии деформации несущих систем технологических машин / Ю.И. Подгорный, В.Ю. Скиба, А.В. Кириллов, О.В. Максимчук, Т.Г. Мартынова, Д.В. Лобанов, И.С. Филатов, П.Ю. Скиба // Обработка металлов (технология, оборудование, инструменты). - 2016. - № 4 (73). - С. 24-33.
- Подгорный Ю. И. Моделирование несущих систем технологических машин / Ю.И. Подгорный, В.Ю. Скиба, А.В. Кириллов, В.Н. Пушнин, И.А. Ерохин, Д.Ю. Корнев // Обработка металлов (технология, оборудование, инструменты). - 2014. - №2 (63). - С.91-99.
- Подгорный Ю. И. Выбор конструктивных параметров несущих систем машин с учетом технологической нагрузки / Ю.И. Подгорный, В.Ю. Скиба, А.В. Кириллов, О.В. Максимчук, Д.В. Лобанов, В.Р. Глейм, А.К. Жигулев, О.В. Саха // Обработка металлов (технология, оборудование, инструменты). - 2015. - № 4 (69). - С. 51-60.
- Артоболевский И. И. Механизмы в современной технике: Справоч. пособие: В 7 т. Т. 5. Кулачковые и фрикционные механизмы. Механизмы с гибкими звеньями / И.И. Артоболевский. – 2-е изд. – М.: Наука, 1981. – 400 с.
- Артоболевский И. И. Синтез плоских механизмов / И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов. – М.: Государственное издательство физико-математической литературы, 1959. – 1084 с.
Список литературы на английском языке / References in English
- Podgornyj Yu.I. Metodika uravnoveshivaniya rotorov tekhnologicheskikh mashin [The methods of technological machines’ rotors balance] / Yu.I. Podgornyj, T.G. Martynova, V.Yu. Skeeba, D.V. Lobanov, A.A. Zhirova, A.N. Bredikhina, A.S. Kosilov, N.S. Pechorkina // Obrabotka metallov (tekhnologiya, oborudovanie, instrumenty) [Metal Working and Material Science]. - 2016. - № 2 (71). - P. 41-50. [in Russian]
- Martynova T.G. Eksperimental'nye issledovaniya nagruzochnykh kharakteristik smesitelya [Experimental researches of loading characteristics of a mixer] / T.G. Martynova, Yu.I. Podgornyj, S.V. Ptitsyn // Nauchnyi vestnik Novosibirskogo gosudarstvennogo tekhnicheskogo universiteta [Science bulletin of the Novosibirsk state technical university]. - 2011. - № 2. - P. 183-188. [in Russian]
- Podgornyj Yu.I. Opredelenie osnovnykh parametrov tekhnologicheskogo oborudovaniya [Determination of the main parameters of the processing equipmen] / Yu.I. Podgornyj, T.G. Martynova, V.Yu. Skeeba, V.N. Pushnin, N.V. Vakhrushev, D.Yu. Kornev, E.K. Zaitsev // Obrabotka metallov (tekhnologiya, oborudovanie, instrumenty) [Metal Working and Material Science]. - 2013. - № 3 (60). - P. 68-73. [in Russian]
- Martynova T.G. Issledovanie uravnoveshennosti rabochego vala meshalki nepreryvnogo deistviya [Continuous-action stirrer shaft balance] / T.G. Martynova, Yu.I. Podgornyj // Sbornik nauchnykh trudov NGTU [Transaction of scientific papers of the Novosibirsk state technical university]. - 2008. - № 2 (52). - P. 41-46. [in Russian]
- Podgornyj Yu.I. Uravnoveshivanie rotorov tekhnologicheskikh mashin [Balancing of technological machine rotors] / Yu.I. Podgornyj, T.G. Martynova, A.N. Bredikhina, A.S. Kosilov, N.S. Pechorkina // Aktual'nye problemy v mashinostroenii [Actual problems in machine building]. - 2015. - № 2. - P. 256-262. [in Russian]
- Podgornyj Yu.I. Vliyanie tochnosti izgotovleniya elementov rotora na ego uravnoveshennost' [Influence of accuracy of the rotor element manufacturing on its balance] / Yu.I. Podgornyj, V.Yu. Skeeba, T.G. Martynova, A.S. Kosilov // Mezhdunarodnyi nauchno-issledovatel'skii zhurnal [International Research Journal]. - 2016. - № 6-2 (48). - P. 119-123. [in Russian]
- Podgornyj Yu.I. Vliyanie tochnosti izgotovleniya mesil'nykh lopatok na uravnoveshennost' rabochego vala smesitelya nepreryvnogo deistviya [Influence of accuracy of manufacturing kneading shovels on steadiness of a working shaft of the amalgamator of continuous action] / Yu.I. Podgornyj, T.G. Martynova // Nauchnyi vestnik Novosibirskogo gosudarstvennogo tekhnicheskogo universiteta [Science bulletin of the Novosibirsk state technical university]. - 2010. - № 3. - P. 119-126. [in Russian]
- Martynova T. G. Issledovanie neustanovivshegosya dvizheniya dvukhval'nogo smesitelya nepreryvnogo deistviya [The transient motion analysis of the double-shaft continuous mixer] / T.G. Martynova, Yu.I. Podgornyj, V.Yu. Skeeba, I.S. Zakharchenko, P.Yu. Skiba // Mezhdunarodnyi nauchno-issledovatel'skii zhurnal [International Research Journal]. - 2016. - № 9-2 (51). - P. 61-65. [in Russian]
- Podgornyj Yu.I. Issledovanie sostoyaniya avtomaticheskoi linii po vyrabotke makaronnykh izdelii BRAIBANTI na OAO "Novosibirskaya makaronnaya fabrika" [Research of the state of the automatic line for the production of pasta BRAIBANTI at OJSC "Novosibirsk macaroni factory"] / Yu.I. Podgornyj, S.V. Ptitsyn, T.G. Martynova // Sbornik nauchnykh trudov Novosibirskogo gosudarstvennogo tekhnicheskogo universiteta [Transaction of scientific papers of the Novosibirsk state technical university]. - 2004. - № 1. - P. 15-18. [in Russian]
- Podgornyj Yu.I. Opredelenie zhestkostnykh kharakteristik i energii deformatsii nesushchikh sistem tekhnologicheskikh mashin [Determination of the rigidity and deformation energy of the technological machine load-carrying systems] / Yu.I. Podgornyj, V.Yu. Skeeba, A.V. Kirillov, O.V. Maksimchuk, T.G. Martynova, D.V. Lobanov, I.S. Filatov, P.Yu. Skiba // Obrabotka metallov (tekhnologiya, oborudovanie, instrumenty) [Metal Working and Material Science]. - 2016. - № 4 (73). - P. 24-33. [in Russian]
- Podgornyj Yu.I. Modelirovanie nesushchikh sistem tekhnologicheskikh mashin [Modeling of the technological machines support systems] / Yu.I. Podgornyj, V.Yu. Skiba, A.V. Kirillov, V.N. Pushnin, I.A. Erokhin, D.Yu. Kornev // Obrabotka metallov (tekhnologiya, oborudovanie, instrumenty) [Metal Working and Material Science]. - 2014. - №2 (63). - P.91-99. [in Russian]
- Podgornyj Yu.I. Vybor konstruktivnykh parametrov nesushchikh sistem mashin s uchetom tekhnologicheskoi nagruzki [Selection of form factors of machine carrying systems in reliance on the process duty] / Yu.I. Podgornyj, V.Yu. Skeeba, A.V. Kirillov, O.V. Maksimchuk, D.V. Lobanov, V.R. Gleim, A.K. Zhigulev, O.V. Sakha // Obrabotka metallov (tekhnologiya, oborudovanie, instrumenty) [Metal Working and Material Science]. - 2015. - № 4 (69). - P. 51-60. [in Russian]
- Artobolevskii I.I. Mekhanizmy v sovremennoi tekhnike: Spravoch. posobie: V 7 t. T. 5. Kulachkovye i friktsionnye mekhanizmy. Mekhanizmy s gibkimi zven'yami [Mechanisms in modern technology. In 7 vol. T. 5. Cam and friction mechanisms. Mechanisms with flexible links ] / I.I. Artobolevskii. – 2nd edition. - M: Nauka, 1981. - 400 p. [in Russian]
- Artobolevskii I.I., Levitskii N.I., Cherkudinov S.A. Sintez ploskikh mekhanizmov [Synthesis of plane mechanisms] / I.I. Artobolevskii, N.I. Levitskii, S.A. Cherkudinov. - M.: Gosudarstvennoe izdatel'stvo fiziko-matematicheskoi literatury, 1959. – 1084 p. [in Russian]