МНОГОКОНТУРНОЕ РЕГУЛИРОВАНИЕ ДАВЛЕНИЯ В МАГИСТРАЛЬНОМ НЕФТЕПРОВОДЕ

Громаков Е.И.1, Кравчук Д.Е2, Лиепиньш А.В.3
1Доцент кафедры УК ТГУ; 2студент каф ТХНГ, ТПУ; 3доцент кафедры ИКСУ ТПУ
МНОГОКОНТУРНОЕ РЕГУЛИРОВАНИЕ ДАВЛЕНИЯ В МАГИСТРАЛЬНОМ НЕФТЕПРОВОДЕ
Аннотация
Целью данной работы является совершенствование системы автоматического регулирования давления (САРД) в магистральном нефтепроводе. Ее объектом управления (ОУ) является подача нефти в магистральном нефтепроводе. САРД обеспечивает поддержание постоянства давления в магистральном нефтепроводе в процессе его эксплуатации. Для регулирования давления при транспортирования нефти предлагается использовать продвинутую (advanced) двухконтурную автоматическую систему регулирования, включающую в себя частотно-регулируемых насос и дроссельную задвижку на его выходе.
Ключевые слова: система автоматического регулирования давления, магистральный нефтепровод, автоматические системы, частотно-регулируемый насос, дроссельная задвижка.
Gromakov E.I.1 Kravchuk D.E2 Liepinsh A.V.3
1Assistant professor of management quality, Tomsk State University; 2Student of Tomsk Polytechnic University;
3Assistant professor of integrated computer control systems, Tomsk Polytechnic University;
MULTILOOP CONTROL OF PRESSURE OF MAIN OIL PIPELINE
Abstract
The purpose of this work is to improve the system of automatic pressure control in the main oil pipeline. Its object of is to control the oil in the pipeline. The pipeline pressure control system provides maintenance to stabilize pressure in the main oil pipeline in its operation. For pressure regulation of oil transportation it is offered to use double output automatic system including two control loops pump control variable with frequency drive and a throttle-valve.
Keywords: system of automatic pressure control, the main oil pipeline, automatic systems, pump control variable with frequency, throttle-valve.
Магистральные насосные агрегаты (МНА) представляют собой сложные технические сооружения и играют ключевую роль в трубопроводном транспортировании нефти. Одни из них предназначены для подачи нефти из подпорных насосов в магистральный нефтепровод, другие служат для восполнения энергетических потерь в магистральном нефтепроводе, а также для обеспечения гидродинамического разделения магистралей на заданные проектом участки с целью облегчения перекачки и локализации гидроударных эффектов в магистральном нефтепроводе [6].
Целью данной работы является совершенствование системы автоматического регулирования давления (САРД) в магистральном нефтепроводе. Ее объектом управления (ОУ) является подача нефти в магистральном нефтепроводе. Примем для определенности вариант функционирования насосов – «из насоса в насос».
Для решения задачи автоматического регулирования давления применяются следующие основные способы: регулирование скорости вращения насосов, дросселирование магистрального нефтепровода и байпасная перекачка нефти. В любом из этих способов насос формирует основные параметры нефтяного потока – подачу нефти Q и напор H в трубе.
Для обеспечения необходимого эксплуатационного режима работы магистральные насосные станции (МНС) включают в себя последовательно соединенные насосы, управляемые частотно регулируемым электроприводом с высоким потреблением электрической энергии [1-5]. Мощность, потребляемая насосом, зависит от объемов подачи нефти по нефтепроводу Q и установленного в нем проектной величины напора H :
![]() ,
,
где ![]() – соответственно ускорение свободного падения и плотность нефти;
– соответственно ускорение свободного падения и плотность нефти;
![]() – к.п.д. насоса, устройств электрического питания, преобразователя частоты; и может достигать мегаватт потребления электрической энергии.
– к.п.д. насоса, устройств электрического питания, преобразователя частоты; и может достигать мегаватт потребления электрической энергии.
Поэтому актуальным является решение задачи снижения ее потребления [6, 7].
Центральной проблемой является поддержание постоянства давления в магистральном нефтепроводе в процессе его эксплуатации.
Неустановившиеся течения жидкости в магистральных нефтепроводах вызываются рядом причин, к числу которых относятся нарушения технологического процесса приема нефти от промысла, пуск и остановка одного или нескольких насосных агрегатов на МНС, резкое открытие или закрытие задвижек, включение и отключение сброса и подкачки нефти по трассе нефтепровода, срабатывание автоматической системы защиты и др.
Это может вызвать, опасные, часто резкие колебания давления и расхода перекачиваемой нефти, создающие в магистральном нефтепроводе аварийные ситуации: нарушение герметичности трубопровода, разрушение технологического оборудования.
Проблема иногда усугубляется поступлением и движением в трубопроводе разносортных нефтепродуктов. При этом характер изменения параметров ОУ, при прочих равных условиях, зависит не только от свойств этих сортов нефти, но и от порядка их следования и местонахождения насосной станции относительно источника возмущения-границы раздела нефтепродуктопроводов.
Для регулирования давления при таких условиях транспортирования нефти стремятся использовать продвинутые (advanced) автоматические системы регулирования с самонастройкой, прогнозированием и упреждением, в основе алгоритмов которых устанавливаются модели объекта управления.
Однако из-за непрерывного изменения факторов, влияющих на величину давления, применение таких алгоритмов оказывается затрудненным, так как перенастройка параметров регулятора может просто не успевать за изменениями давления в трубопроводе или быть недостаточно корректной.
Как правило, САРД реализуется в виде контуров с обратной связью по измеренным значениям давления (рис.1).
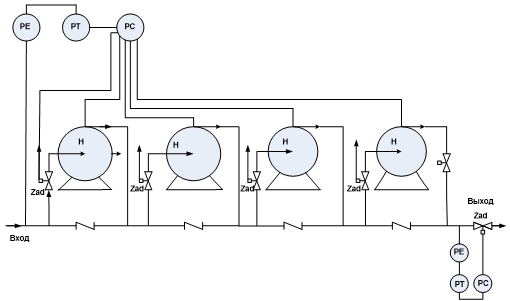
Рис.1 - Схема системы автоматического регулирования давления
Показанный на этом рисунке контур регулирования давления на входе насоса играет принципиальную роль, обеспечивая снижение риска кавитации лопаток насоса, в то время как другие контуры автоматического регулирования обеспечивают поддержание установленного значения давления в магистральном трубопроводе.
Из этой схемы следует возможность использования следующих вариантов исполнительных устройств САРД: насос с частотным преобразователем, регулирующие задвижки на входе и выходе насоса (или в байпасе).
Структурные схемы активизации этих исполнительных устройств показаны на рис 2 и 3
Из практики автоматического регулирования известно, что возможности обратной связи в САРД в значительной мере связаны с выбором исполнительного механизма. Однако, традиционно рассматриваются и сравниваются между собой одноконтурные САРД, обеспечивающие регулирование с использованием только одного исполнительного устройства. Многими исследованиями показано, что наименьшим потерями электрической энергии обладает частотно-регулируемый привод насосов (рис. 2) [1].
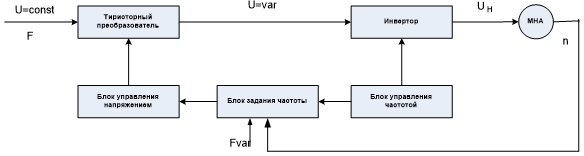
Рис.2 - Регулирование частоты вращения изменением подводимого напряжения
Считается что для получения высоких энергетических показателей работы электропривода насоса: коэффициентов мощности, полезного действия, перегрузочной способности, сохранения желаемых механических характеристик во всем диапазоне изменения его скорости вращения одновременно с частотой необходимо изменять и подводимое к двигателю напряжение. Закон изменения напряжения при этом должен зависеть от характера момента нагрузки.
Для регулирования задвижкой используются алгоритмы обеспечивающие трехпозиционное регулирование скоростью позиционной перестройки ее регулирующего органа (рис. 3)
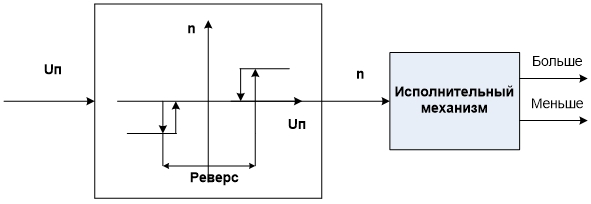
Рис.3 - Трехпозиционное регулирование позиционное управление задвижкой
В сравнительных расчетах потребления энергии в частотно-регулируемых МНА рассматриваются или установившиеся режимы работы, или режимы их пуска и не учитывается то, что насос в находится в контуре автоматического регулирования и, следовательно, в переходных режимах регулирования давления в этом контуре электропривод будет потреблять энергию на преодоление инерционного сопротивления, связанного с большими массами, нагруженными на валу двигателя.
При плохом качестве регулирования (большой колебательности и значительной величине перерегулирования) эти потери могут быть значительными. Это следует из уравнения движения насосного агрегата:
Инерционные потери, связанные с непрерывным разгоном или торможением насоса, оказываются пропорциональными ускорениям разгона привода в течении переходного процесса и маховому моменту насоса и ротора привода. Последний оказывается для больших МНА значительной величиной.
В тоже время из-за небольшой инерционности привода задвижек электрические потери в динамике переходного процесса позиционного перемещения регулирующего органа оказываются меньшими по сравнению с насосным агрегатом.
Вот почему, заманчивым решением задачи регулирования является одновременное использование в дополнение к частотному регулированию либо дроссельного исполнительного устройства, либо задвижки байпасного регулирования. В таком варианте построения САРД можно реализовать экономичные по потреблению энергии режимы работы САРД. Такие схемы САРД можно назвать многоконтурными, так как регулирование давлением осуществляется одновременно несколькими контурами и различными исполнительными устройствами.
Для снижения величины инерционного момента следует обеспечить плавное изменение частоты напряжения питания электропривода МНА, а контуры регулирования позиционным перемещением привода задвижек вывести на режимы быстрого регулирования, так чтобы собственная частота контуров задвижек превышала, по крайней мере, на порядок собственную частоту контура регулирования скорости насоса.
В этом случае контур регулирования положением задвижки может подавлять высокие частоты динамики САР и тем самым освобождать контур регулирования насоса от непосредственного динамического противодействия. Контур регулирования насоса при этом может взять на себя противодействие низкочастотным составляющим динамики так, чтобы в установившихся или квазиустановившихся режимах стабилизации давления степень открытия выходной задвижки была бы максимальной, а открытие задвижки байпаса было бы минимальной.
Таким образом, возможны следующие варианты двухконтурного регулирования: «насос-выходная задвижка» и «насос-байпасная задвижка». В принципе, такое регулирование может осуществляться и при включении всех трех контуров регулирования одновременно.
При условии значительного разделения диапазона собственных частот можно рассматривать их динамически разными контурами. Назначив дроссельный контур для быстрого регулирования, насосный контур будет выполнять медленную (плавную) доводку задвижки в положение, обеспечивающее энергетически экономичный режим работы насосного привода.
Выводы
- В переходных режимах электропривод магистрального насосного агрегата, включенный в контур САРД, может потреблять значительную энергию на преодоление инерционного сопротивления, массового момента насоса.
- Для снижения потери энергопотребления насосным агрегатом следует использовать многоконтурные схемы САРД, включающие в себя контуры управления скоростью вращения насосом и положением задвижки на выходе насоса, или в байпасе перекачки нефти на входе насоса.
- Собственные частоты этих контуров разделяются так, что собственная частота контура регулирования скорости задается значительно ниже частот контуров регулирования задвижек.
- Многоконтурная САРД реализуется так, что контур регулирования насоса берет на себя противодействие низкочастотным изменениям давления. В процессе медленной перестройки частоты в установившихся или квазиустановившихся режимах степень открытия выходной задвижки устанавливается максимальной, а открытие задвижки байпаса – минимальной.
Литература
- Кондрашова О.Г. Шамшович С.О. Частотное управление магистральными насосами на эксплуатационном участке «Москаленки-Юргамыш» Электронный научный журнал «Нефтегазовое дело» №3, 2012, с. 16-24.
- Кузнецова Е.Е. Методика проектирования цифрового регулятора давления на выходе насосного агрегата Автоматизация в промышленности №4, 2009, с.3-5.
- Кузнецова Е.Е. Цифровая система управления центробежным насосным агрегатом Автоматизация телемеханизация и связь в нефтяной промышленности №4, 2009, с.64-66
- Кузнецова Е.Е., Лянцев О.Д. Метод определения ПИД-регулятора центробежного насосного агрегата, Автоматизация телемеханизация и связь в нефтяной промышленности №4, 2010.
- Кузнецова Е.Е., Лянцев О.Д. Особенности разработки цифровой системы управления ЦНА Автоматизация телемеханизация и связь в нефтяной промышленности №4, 2011, с.34-36
- Пашаев А.М., Эфедиев О.З., Мамедов А.И. Азизов Р.Р. Численное моделирование динамических процессов в магистральных нефтепродуктопроводах при последовательной перекачке разносортных Проблемы энергетики №2, 2007, с. 21-37.
- K. Pedersen and Z. Yang. Efficiency Optimization of a Multi-pump Booster system. Proc. of Genetic and Evolutionary Computation Conference (GECCO-2008), Atlanta, Georgia, USA, Jul 12-16 2008, pp.1611-1618.
- Yang and H. Børsting. Energy Efficient Control of a Boosting System with Multiple Variable-Speed Pumps in Parallel. Proc. of IEEE CDC2010, Atlanta, Georgia USA, December 15-17, 2010, pp.2198-2203.