Вернуться к статье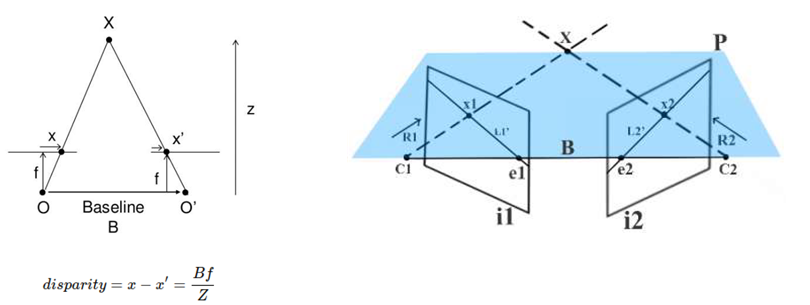
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА РОБОТА-МАНИПУЛЯТОРА С ПОМОЩЬЮ КАМЕРЫ И МАШИННОГО ЗРЕНИЯ
Рисунок 1 - Симуляция модели
слева – диспарантность изображения; справа – геометрия диспарантности
Рисунок 1 - Симуляция модели
слева – диспарантность изображения; справа – геометрия диспарантности