Вернуться к статье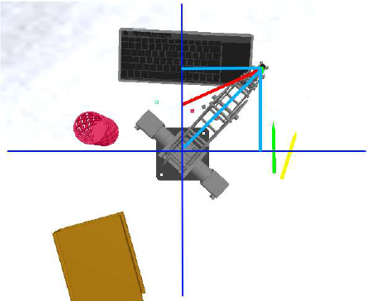
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА РОБОТА-МАНИПУЛЯТОРА С ПОМОЩЬЮ КАМЕРЫ И МАШИННОГО ЗРЕНИЯ
Рисунок 1 - Геометрическое решение задачи нахождения местоположения рабочего инструмента
Рисунок 1 - Геометрическое решение задачи нахождения местоположения рабочего инструмента