Rus
Eng
Наши журналы
Опубликовать статью
Вход и регистрация
О журнале
Архив
Контакты
Расширенный поиск
Вернуться к статье
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА РОБОТА-МАНИПУЛЯТОРА С ПОМОЩЬЮ КАМЕРЫ И МАШИННОГО ЗРЕНИЯ
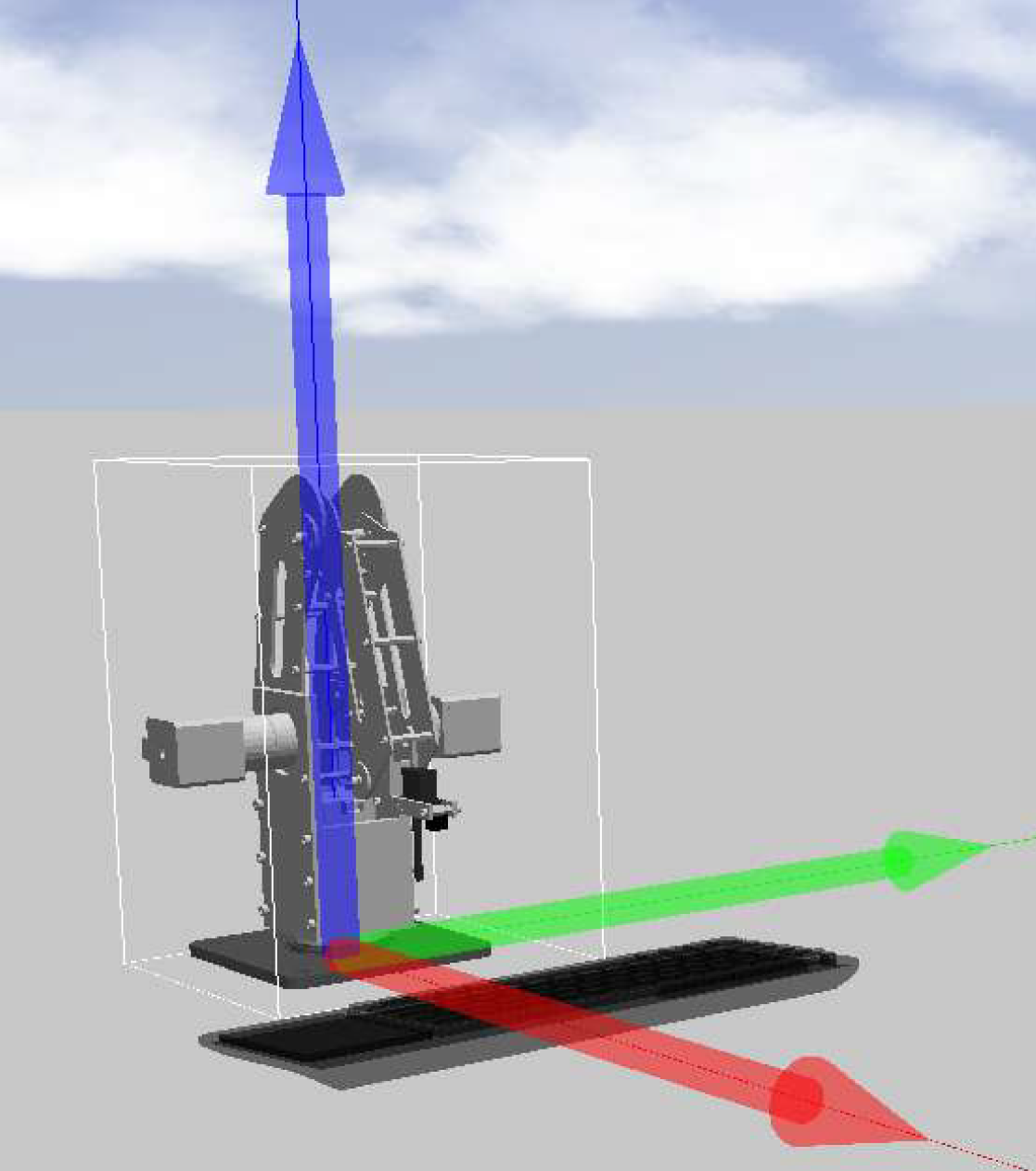
Рисунок 1 - Кинематическая схема модели робота-манипулятора
DOI: 10.60797/IRJ.2024.143.156.4