Вернуться к статье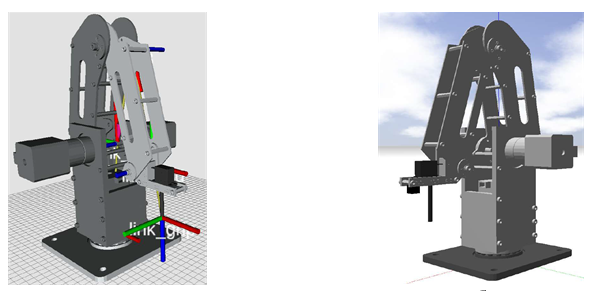
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА РОБОТА-МАНИПУЛЯТОРА С ПОМОЩЬЮ КАМЕРЫ И МАШИННОГО ЗРЕНИЯ
Рисунок 1 - Симуляция модели
а – в визуализаторе rViz, б – в симуляторе Gazebo [1]
Рисунок 1 - Симуляция модели
а – в визуализаторе rViz, б – в симуляторе Gazebo [1]