СОВЕРШЕНСТВОВАНИЕ Беспилотных летательных аппаратов для обнаружения и мониторинга лесных пожаров
СОВЕРШЕНСТВОВАНИЕ Беспилотных летательных аппаратов для обнаружения и мониторинга лесных пожаров
Аннотация
На основе личного опыта и литературных данных рассмотрены вопросы совершенствования беспилотных летательных аппаратов (БПЛА) для целей обнаружения и мониторинга лесных пожаров. Отмечается, что максимальный эффект может быть обеспечен при использовании БПЛА трёх типов, каждый из которых решает конкретные задачи.
БПЛА первого типа предназначен для разведки лесного пожара предоставляющий информацию руководителю тушения. БПЛА второго типа служит для сбора материала о крупных лесных пожарах, определяет координаты групп пожаротушения в реальном времени, осуществляет мониторинг за площадью пожара и связь между группами пожаротушения. Третья группа БПЛА преследует цель замены пилотируемой авиации при авиапатрулировании больших территорий лесного фонда.
БПЛА каждой группы характеризуются различным оснащением необходимым для решения конкретных задач, а также отличаются периодом нахождения в воздухе, условиями взлёта и так далее. Объединение требований к БПЛА, точнее создание универсального БПЛА, приведёт к удорожанию работ или снижению уровня, выполняемых им задач. Реализация высказанных предложений позволит повысить эффективность использования БПЛА при разведке и мониторинге лесных пожаров.
1. Введение
Изменение климата, наблюдающееся в последние годы, привело к изменению некоторых устоявшихся закономерностей и вызвало необходимость совершенствования подходов к охране и защите лесов. Так, в частности, в большинстве районов таёжной зоны Российской Федерации увеличилась продолжительность пожароопасного сезона , , возросли негативные последствия лесных пожаров , и т.д. По причине снижения уровня грунтовых вод и пересыхания лесной подстилки низовые лесные пожары на участках с торфяными почвами стали развиваться в многоочаговые торфяные пожары , . При этом доля торфяных пожаров, составляемая в прежние годы 1-1,5% увеличилась в 2022 г. в Свердловской области до 9,3% , и процесс увеличения доли торфяных пожаров продолжился в 2023 г.
Особо следует отметить, что если в прежние года торфяные пожары возникали в конце лета-начале осени, то в настоящее время на заброшенных осушенных торфяниках они фиксируются уже в апреле, сразу после схода снежного покрова и высыхания прошлогодней травы , . Специфика горения, точнее тления , торфяных пожаров, вызывает необходимость их мониторинга в течение длительного периода времени на нередко удаленной, труднодоступной местности. Указанное вызывает необходимость использования в целях обнаружения и мониторинга лесных пожаров беспилотных летательных аппаратов (БПЛА). Опыт использования БПЛА для различных целей имеется в большинстве субъектов РФ, в том числе и на Урале , . Однако применение БПЛА сдерживается отсутствием рекомендаций по их совершенствованию в целях использования для обнаружения и мониторинга лесных пожаров.
Цель исследования – обоснование предложений по совершенствованию оснащения БПЛА для обнаружения и мониторинга лесных пожаров.
В соответствии с целью исследования решались следующие задачи:
- классификация БПЛА по целевому назначению;
- разработка рекомендаций по оснащению БПЛА каждого типа назначения необходимой аппаратурой;
- разработка предложений по совершенствованию использования БПЛА при обнаружении и мониторинге лесных пожаров.
Методика исследований. В основу исследований положен анализ использования БПЛА, имеющийся в научной и ведомственной литературе, а также личный опыт авторов по применению БПЛА при обнаружении и мониторинге лесных пожаров.
2. Основные результаты
В настоящее время БПЛА используются в лесном хозяйстве для разных целей, в том числе для обнаружения и разведки лесных пожаров при организации охраны лесов.
Анализируя полученный опыт, можно выделить 3 основных типа использования дронов:
1) «глаза» руководителя тушения лесного пожара. Основные задачи, которые должен решать такой БПЛА (дрон): разведка, определение площади, силы, направления распространения некрупного лесного пожара;
2) разведка, проводимая при тушении крупного лесного пожара: постоянный мониторинг его развития, определение и координация различных групп тушения, организация связи между этими группами;
3) авиационный мониторинг – мониторинг лесопожарной обстановки на больших площадях лесного фонда, как перспектива замены пилотируемой авиации при выполнении работ в зонах авиационного мониторинга.
Для реализации каждого типа использования должны применяться совершенно разные типы БПЛА, с набором определенных технических характеристик наиболее подходящий для выполнения целевых задач. Создание и применение универсального летательного аппарата на наш взгляд приведет к удорожанию работ и недопустимому ухудшению потребительских качеств, что существенно затруднит их применение на практике.
Самое массовое внедрение в настоящий момент получили дроны первого типа. Исследование и опытное их применение для тушения лесных пожаров началось нами в Свердловской области в 2018 году на пожарах в Ивдельском лесничестве. Их применяют руководители тушения для оперативной разведки пожаров. Существующие модели использовались в основном для видеосъемки и визуального наблюдения хорошо зарекомендовали себя для этих целей. По результатам работ сразу стало понятно, что помимо визуальной картинки, для принятия решений по тушению пожаров требуется дополнительная информация: границы кварталов, наличие дорог, инструментов, позволяющих в полете определить количественные показатели пожара. Необходимость получения этой информации легла в основу разработки программного обеспечения для автоматизации выполняемых при тушении лесных пожаров задач.
На основе испытания различных модификаций дронов, на протяжении 2018-2020 гг. с их использованием было потушено более 50 пожаров, в том числе 15 крупных, на которых требовалось оперативно организовать мониторинг лесопожарной обстановки и планировать тушение пожаров с учетом меняющейся обстановки, нами были определены основные требования к используемым аппаратам. В результате использования дронов в условиях темнохвойной тайги Северного Урала стало очевидно, что данный вид беспилотника должен быть квадрокоптерного типа с четырьмя несущими винтами (рис. 1). Данная компоновка позволяет достичь необходимой маневренности, компактности и легкости, для его переноски в условиях пересеченной местности, за счет складывания лучей на которых расположены двигатели. Размеры дрона при этом должны быть не больше 40×40 см, дрон должен быть оборудован датчиками обнаружения препятствий это необходимо для того чтобы реализовать возможность запускать его в небольшие просветы между крон деревьев, так как время для поиска подходящей взлетной площадки в условиях тушения лесного пожара должно быть минимальным. Источник питания должен быть электрическим, это сведет к минимуму возможные риски, связанные с использованием горючих жидкостей на пожаре и позволит сохранить компактность и легкость дрона. В условиях тушения пожаров в труднодоступной местности вдали от объектов инфрастуктуры был сделан вывод о том, что используемые аккумуляторы должны быть съемными, быстрозаменяемыми и обеспечивать непрерывный полет минимум 40 минут. Зарядная станция должна быть оборудована хабом для зарядки сразу нескольких (3-4) аккумуляторов, и возможностью запитываться от различных источников питания, электрических сетей, генераторов, бортовых сетей самолетов, легковых и грузовых автомобилей.

Рисунок 1 - Квадрокоптер для первого типа использования
Видеоизображение с камеры, а также телеметрия должны вестись на пульт управления в режиме реального времени на расстоянии до 4 км. При потере сигнала, а также при работе систем в нештатном режиме должна активироваться функция возврата в точку взлета на заданной высоте.
Многолетняя засуха в Свердловской области привела к тому, что с 2021 года резко возросло количество почвенных пожаров. При тушении таких пожаров особое значение имеет поиск скрытых (подземных) очагов горения. Так при тушении торфяного пожара в г. Екатеринбурге в микрорайоне Солнечный в 2021 году для решения этой задачи нами был испытан образец БПЛА оборудованный тепловизором, в результате этих испытаний с обязательной проверкой на местности были определены оптимальные значения параметров используемой тепловизионой камеры. Разрешение такой камеры должно быть не менее 640×512 с поддержкой измерения температуры в точке и области, на предупреждение о высокой температуре, цветовыми палитрами и изотермами. В результате этой работы, стало ясно, что с использованием данного аппарата поиск скрытых очагов тления в разы эффективнее чем наземное прочесывание, очагов тления. Последнее гарантированно обнаруживались в радиусе 400 метров. При этом наземным способом определить эти очаги не всегда получалось на расстоянии менее 1 метра от наблюдателя. Высокая эффективность их применения БПЛА привела к тому, что резко вырос запрос на наличие квалифицированного внешнего пилота с таким БПЛА на каждом пожаре. Для решения этой проблемы был разработан регламент при котором оператору БПЛА не было необходимости ежедневно дежурить на каждом пожаре. Суть проведения работ сводилась к созданию ортофотоплана на каждый пожар, с указанием на нем каждого очага и загрузкой этого плана в навигаторы группы тушения. Указанное привело в значительно большей производительности труда. Однако это повысило требования к БПЛА: данная модификация должна быть оборудована ГНСС прибором, летать по заданному маршруту и делать четкие фотографии, что потребует оборудования механическим затвором.
Существующие модели квадрокоптеров удовлетворяют текущим техническим требованиям. Однако, выявленные недостатки потребовали доработки интерфейса для выполнения специфических задач. Так, на основе выявленных в процессе эксплуатации запросов были сформированы и переданные в работу разработчикам программного обеспечения задания. Для составления плана тушения пожара на экране пульта управления должно отображаться не только текущее положение дрона на карте, но и место пересечения оси оптического центра камеры с поверхностью земли для определения расположения наблюдаемого объекта и его географических координат. Это не только позволит определить расположение наблюдаемого объекта, например, источника столба дыма, но и позиционировать его на карте на экране пульта управления. При этом в пульт управления необходимо предусмотреть возможность установки как географических, так и специализированных лесных карт, а также космических снимков. Помимо определения местоположения наблюдаемого объекта данная функция может быть использована для оперативного определения площади пожара и расположения активной кромки пожара на картографическом материале для оперативного составления схемы пожара (рис. 2). При этом отпадает необходимость пролета БПЛА по всей кромке пожара, а дрон, используемый для этого, не подвергается воздействию горячих конвективных потоков. В результате был создан программный продукт, устанавливаемый в пульт управления дрона Финист, который частично справляется с поставленными задачами.
Кроме того, перспективным направлением развития таких дронов является организация системы передачи телеметрии и видеопотока во внешние системы, для использования данных, получаемых с дрона сразу неограниченным количеством участников тушения и передачи ее в диспетчерские центры. Указанная функция позволит осуществлять управление дроном удаленно от его месторасположения, что сведет к минимуму потребность нахождения внешних пилотов в зоне действия пожаров. Данное направление пока до конца не реализовано в конечном продукте, работа над осмыслением реализации этих задач ведется нами в настоящее время.
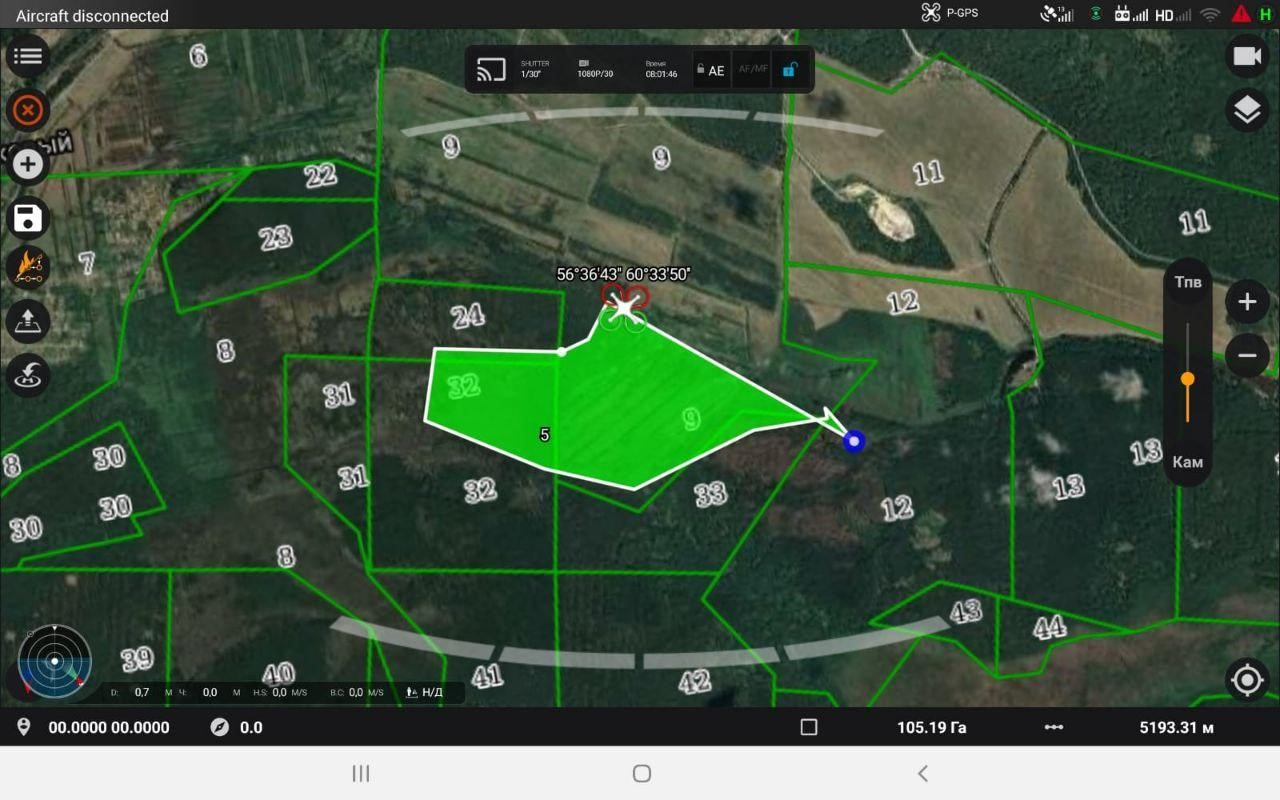
Рисунок 2 - Пример реализации функции расчета площади пожара косвенным методом без облета периметра пожара
В феврале 2024 для этого были проведены испытания БПЛА Конструкторского бюро Уральского завода гражданской авиации АО «ЭЙРБУРГ» «Пчелка». Результатами этих испытаний стали следующие выводы. Самой подходящей формой для такого аппарата является конвертоплан, за счет своих свойств он может долгое время находиться в воздухе, не затрачивая большого количества энергии. При этом сохраняется актуальность организации взлетной площадки в условиях ограниченного пространства. Тип двигательной установки может быть как электрический, так и двигатель внутреннего сгорания. Комплектоваться БПЛА должен как оптической, так и тепловизионной камерой, при этом должна существовать возможность навески оборудования ретрансляции для организации связи.
Аппарат, имеющий форму крыла, является наиболее подходящим для реализации задачи долгого пребывания в воздухе с минимальным энергопотреблением. Крыло обладает особыми свойствами, которые позволяют ему поддерживать полет без значительных затрат энергии.
В качестве двигательной установки для такого аппарата можно использовать как электрический двигатель, так и двигатель внутреннего сгорания. Это позволит адаптировать аппарат под различные условия и требования задачи.
Для эффективного выполнения поставленной задачи аппарат должен быть оснащен оптической и тепловизионной камерами. Это позволит получать информацию о окружающей среде как в видимом, так и в инфракрасном спектре, что может быть полезно для различных целей, включая наблюдение, поиск горящей кромки и очагов почвенных пожаров. Кроме того, аппарат должен иметь возможность нести на себе оборудование связи и ретрансляторы для организации связи на удаленных расстояниях. Это позволит использовать аппарат для коммуникаций в труднодоступных местах или в условиях, где обычная связь затруднена.
Таким образом, аппарат с формой крыла или самолетного типа, оснащенный оптической и тепловизионной камерами, а также с возможностью нести оборудование связи и ретрансляторы, является оптимальным для реализации поставленной задачи. Это позволит ему эффективно выполнять свои функции на протяжении длительного времени без необходимости большого количества энергии. Перспективной разновидностью является конвертоплан, такой тип самолета, при котором винтовые двигатели работают при взлете и посадке как несущие, а при горизонтальном полете как тянущие или толкающие (рис. 3). Такое устройство дает преимущество в том, что не надо искать подходящую взлетную площадку в лесу.

Рисунок 3 - Внешний вид конвертоплана
Эффективность дронопортов обеспечивается тем, что нет необходимости квалифицированным внешним пилотам выезжать на место взлёта. Дронопорты могут быть установлены на авиаотделениях, лесопожарных станциях, лесничествах, в которых работающий персонал может обеспечить их сохранность и первичное техническое обслуживание. Дальность полёта современных конвертопланов вполне может обеспечить перекрытие большинства территории государственного лесного фонда (ГЛФ), охваченного интенсивным лесным хозяйством. Полетное задание таким станциям может отдаваться центрами управления полётами, распложенными, например, в РДС субъектов, а результаты полетов в виде снимков и планов могут загружаться сразу в общую систему мониторинга и быть доступен всем заинтересованным специалистам. При такой организации работ дроны могут выполнять массу задач: мониторинг и разведку пожаров, приёмку лесохозяйственных работ лесничествами, фитомониторинг древостоев, патрулирование лесов.
3. Заключение
1. В настоящее время использование БПЛА для обнаружения и мониторинга лесных пожаров является весьма перспективным.
2. При использовании БПЛА целесообразно разделять их на три типа по целевому назначению. БПЛА первого типа осуществляет разведку при тушении мелких пожаров, второго типа – крупных и третьего типа – авиапатруливание лесного фонда.
4. Каждому типу БПЛА рекомендуется свой перечень оборудования для выполнения целевых задач.
5. Создание универсального БПЛА малоперспективно, поскольку повышает себестоимость выполняемых работ или снижет их качество.
6. Разработка БПЛА и их комплектации при правильном использовании позволит не только успешно решать задачи обнаружения и мониторинга лесных пожаров, но и выполнять фитомониторинг, приёмку лесохозяйственных работ и т.д.