О ПРИМЕНЕНИИ ТРЕХЗЕРКАЛЬНЫХ СИСТЕМ С КОМПЛАНАРНЫМИ НОРМАЛЯМИ В КАЧЕСТВЕ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СРЕДСТВ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ НАПРАВЛЯЮЩИХ СТАНКОВ

Комарова Т.Ю. 1, Кульчицкий А.А.2
1Магистр,
2Кандидат технических наук, доцент,
Национальный минерально-сырьевой университет «Горный»
О ПРИМЕНЕНИИ ТРЕХЗЕРКАЛЬНЫХ СИСТЕМ С КОМПЛАНАРНЫМИ НОРМАЛЯМИ В КАЧЕСТВЕ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СРЕДСТВ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ НАПРАВЛЯЮЩИХ СТАНКОВ
Аннотация
В статья посвящена решению метрологических проблем аттестации металлорежущих станков. Содержит теоретическое исследование схем систем контроля прямолинейности направляющих станков на базе зеркальных трехзеркального измерительного преобразователя с целью повышения чувствительности по отношению к смещению в плоскости перпендикулярной лучу и уменьшения влияния расстояния до преобразователя по направлению движения и его угловых отклонений.
Ключевые слова: зеркальные преобразователи, оптические средства измерений, контроль геометрических параметров.
Komarova T.Ju.1, Kul'chickij A.A.2
1Postgraduate,
2Candidate of Technical Sciences, associate professor,
National Mineral Resources University (University of Mines)
ON THE APPLICATION OF THREE-MIRROR SYSTEMS WITH COPLANAR NORMALS AS TRANSMITTERS CONTROLSLING THE STRAIGHTNESS OF THE GUIDEWAYS OF MACHINE TOOLS
Abstract
The article is devoted to solving the problems of metrological certification of machine-tool. Contains theoretical research schemes monitoring system machine slideway, based on a triple-mirror measuring converters with the purpose of increasing sensitivity with respect to the displacement in the plane perpendicular to the beam and reduce the influence of the distance to the transducer in the direction of movement and angular deviations.
Keywords: mirror converters, optical measuring instruments, control of geometrical parameters.
Контроль прямолинейности направляющих станка в случае их недоступности производится путем измерения прямолинейности перемещения по ним элемента станка.
От прямолинейности перемещения перемещаемых элементов станка зависит не только способность станка производить прямые или плоские поверхности на обрабатываемых изделиях, но и точность позиционирования точек обрабатываемого изделия. Движение по прямой линии перемещаемого элемента [1] в общем случае характеризуется отклонениями в шести направлениях (рис. 1):
- одно позиционное отклонение в направлении движения;
- два линейных отклонения траектории в плоскости, перпендикулярной к направлению перемещения;
- три угловых отклонения – повороты вокруг осей X, Y, Z.
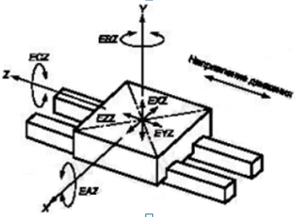
Рис. 1 - Отклонения при перемещении по оси Z
Существующие методы и средства контроля станочного оборудования могут быть классифицированы согласно схеме рис. 2.
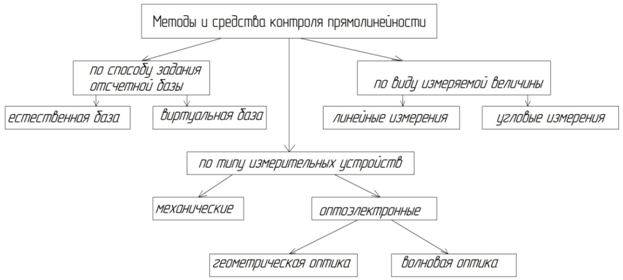
Рис. 2 - Классификация методов и средств контроля станочного оборудования
Стандарт [1] допускает применение средств измерения, обеспечивающих точность измерений не ниже, чем средства, описанные в стандарте. Для повышения чуствительности к по отношению к смещению в плоскости перпендикулярной лучу и уменьшения влияния расстояния до преобразователя по направлению движения и его угловых отклонений предлагается использование зеркальных преобразователей с компланарными нормалями.
Анализ методов и средств измерения, основанных на принципах геометрической оптики [2], выявил три возможные структуры конструктивного исполнения системы:
- преобразователь (ЗП) перемещается между неподвижными излучателем (И) и приемным устройством (рис. 3а); достоинством такой структуры является возможность обеспечить фиксацию оптической оси объектива; недостатком можно считать зависимость показаний приемного устройства от расстояния между приемным устройством и преобразователем (в случае, когда входной и выходной лучи проходят под углом к горизонту);
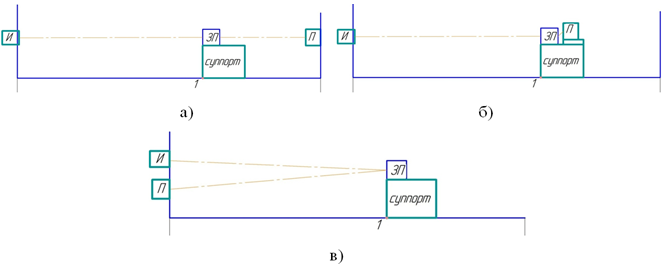
Рис. 3 – Схемы конструктивного исполнения системы системы контроля прямолинейности направляющих станков
- приемное устройство жестко закреплено относительно преобразователя (рис. 3б); структуры преимуществом такой структуры является независимость показаний приемного устройства от дальности;
- излучатель и приемное устройство закреплены на одной и той же плоскости (структура с возвращающимся лучом) (рис. 3в); такая структура позволяет обеспечить фиксацию оптической оси объектива, однако в случае негоризонтального положения лучей показания приемного устройства зависят от дальности.
В оптоэлектронных устройствах в качестве носителя информации может использоваться как один луч, так и пучок лучей. В последнем случае в измерительных целях может быть использована также информация о соотношении координат проекций лучей.
Для структур, изображенных на рис. 3а и рис. 3б, исследуем возможность применения в качестве измерительных преобразователей простейших трехзеркальных систем с компланарными нормалями. В системе контроля и аттестации станочного оборудования зеркальный преобразователь подвергается малым линейным и угловым смещениям. Исследование преобразователей произведено путем графического, а затем математического моделирования. Теоретической базой для конструирования зеркальных преобразователей служат основы геометрической оптики; ход лучей в зеркальной системе однозначно связан с параметрами зеркальной системы. В ходе графического моделирования были построены параметрические модели в среде КОМПАС-3D V12 зеркальных преобразователей и исследованы базовые структуры преобразователей, послужившие прототипом для математических моделей. Основным достоинством графического моделирования является наглядность; оно позволяет не только выявить существенные для математического описания системы объекты, но и оценить пределы возможного варьирования тех или иных факторов. Для исследования поведения зеркальных преобразователей при малых линейных смещениях и поворотах были построены математические модели в системе MATLAB.
Исследуем поведение углового зеркала применительно к системе, изображенной на рис. 4. При перемещении подвижного элемента станка возникают смещения преобразователя в вертикальной плоскости (рис. 4а) и угловые смещения (рис. 4б), вызывающие изменение положения преобразователя в пространстве и, соответственно, ход луча.
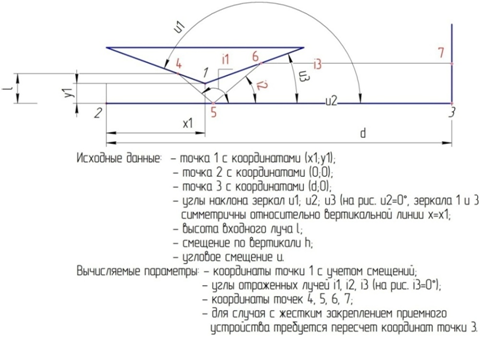
Рис. 4 - Параметры трехзеркальной системы
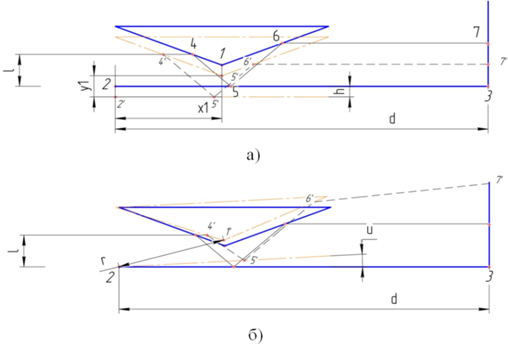
Рис. 4 - Вертикальное смещение (а) и поворот (б) трехзеркального преобразователя
Для трехзеркального преобразователя базовой (Б) структуры и двух модифицированных структур проведены следующие исследования:
- воздействие вертикальных смещений (h=0 … 1 мм);
- воздействие угловых смещений (u=0 … 60 “) ;
- воздействие дальности (d=400 … 2000 мм).
Параметры исследуемых структур:
Б – u1=160°; u2=0°; u3=20°; x1=50; y1=10;
Структура I – u2=1°; u1=160°; u3=20°;
Структура II – u1=160°; u2=0°; u3=21°.
Пример таблицы с результатами исследования трехзеркального преобразователя при малых смещениях в вертикальной плоскости (на минимальной дальности 400 мм) представлен в таблице.
Таблица 1 - Действие линейных смещений на трехзеркальный преобразователь
| h | Базовая структура | Структура I | Структура II | |||
| l0=20 | l0=15 | l0=20 | l0=15 | L0=20 | l0=15 | |
| 1 | 17.3209 | 22.3209 | 27.1634 | 31.2905 | 6.3684 | 12.3728 |
| 0,8 | 16.9209 | 21.9209 | 26.7983 | 30.9254 | 5.9282 | 11.9326 |
| 0,6 | 16.5209 | 21.5209 | 26.4332 | 30.5603 | 5.4880 | 11.4924 |
| 0,4 | 16.1209 | 21.1209 | 26.0682 | 30.1952 | 5.0478 | 11.0523 |
| 0,2 | 15.7209 | 20.7209 | 25.7031 | 29.8301 | 4.6077 | 10.6121 |
| 0 | 15.3209 | 20.3209 | 25.3380 | 29.4651 | 4.1675 | 10.1719 |
В дальнейшем для экономии места будет приводиться только графическая интерпретация результатов исследования.
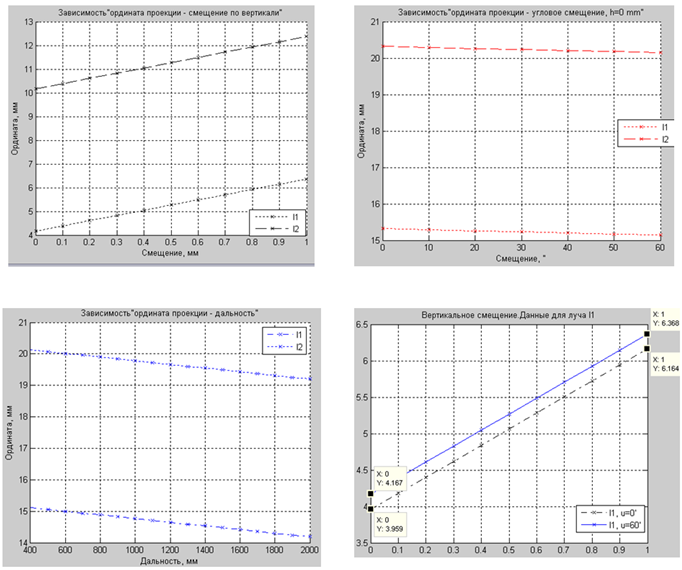
Рис. 5 - Экспериментальные данные для базовой структуры
В ходе исследования выяснено, что:
- рассмотренные структуры трехзеркальных преобразователей при малых линейных смещениях в вертикальной плоскости обеспечивают масштабный коэффициент, больший 1(при этом наибольший масштабный коэффициент обеспечивают базовая структура и структура II – k=2,2);
- рассмотренные структуры трехзеркальных преобразователей чувствительны к поворотам. Большей величине поворота соответствует большее расстояние между проекциями лучей;
- ордината проекции луча и дальность связаны линейно;
- изменение дальности не влияет на расстояние между проекциями лучей;
- расстояние между двумя параллельными лучами с ростом величины линейного смещения в вертикальной плоскости остается неизменным.
Произведем аналогичные исследования трехзеркальных преобразователей для конструктивно объединенных преобразователя и приемного устройства. При исследовании принято d=150.
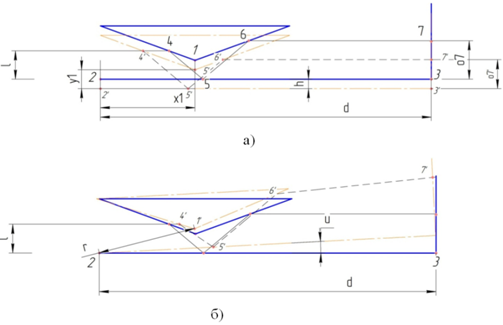
Рис. 6 - Вертикальное смещение (а) и поворот (б) преобразователя и приемного устройства преобразователя и приемного устройства
Исследование зависимости расстояния между лучами при сообщении трехзеркальным преобразователю малых линейных смещениях в вертикальной плоскости представлено на рис. 7.
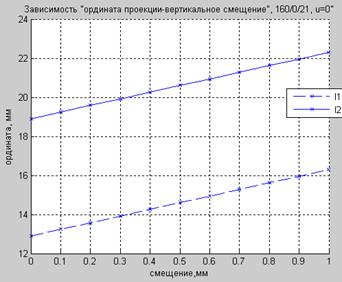
Рис. 7 - Исследование воздействия вертикальных смещений на структуру II
Исследование показало, что:
- рассмотренные структуры обеспечивают масштабный коэффициент по линейному смещению в вертикальной плоскости, больший 2 (при этом наибольшим масштабным коэффициентом обладает структура II – k=3,4);
- величина расстояния между ординатами проекций двух параллельных лучей неизменна при линейных смещениях системы в вертикальной плоскости;
-низкая чувствительность к угловым смещениям ( для рассматриваемых структур эта величина составляет -0,0005 мм/”).
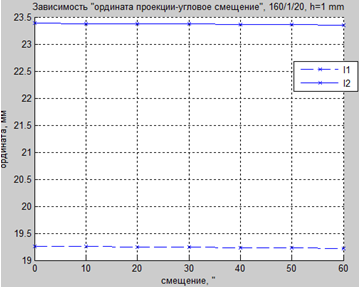
Рис. 8 - Исследование воздействия малых угловых смещений на структуру I
Таким образом, трехзеркальный преобразователь в системе с жесткой фиксацией приемного устройства
- обеспечивает более высокий масштабный коэффициент по линейному смещению в вертикальной плоскости, нежели в системе без фиксации приемного устройства относительно преобразователя;
- обладает низкой чувствительностью к угловым смещениям.
Литература
- ГОСТ Р ИСО 230-1-2010 Испытания станков. Методы измерения геометрических параметров.
- Оптические методы бесконтактных измерений линейных перемещений: монография/ сост. Сарвин А.А., Кульчицкий А.А., Наумова А.К., - СПб.: Изд-во СЗТУ, 2011.
References
- GOST R ISO 230-1-2010 Ispytanija stankov. Metody izmerenija geometricheskih parametrov.
- Opticheskie metody beskontaktnyh izmerenij linejnyh peremeshhenij: monografija/ sost. Sarvin A.A., Kul'chickij A.A., Naumova A.K., - SPb.: Izd-vo SZTU, 2011.