ОЦЕНКА СОСТОЯНИЯ ОБЪЕКТА КОНТРОЛЯ МЕТОДОМ е-ОБЛАСТЕЙ

Сучкова Л.И.
Кандидат технических наук, доцент, ФГБОУ ВПО «Алтайский государственный технический университет им. И.И. Ползунова»
ОЦЕНКА СОСТОЯНИЯ ОБЪЕКТА КОНТРОЛЯ МЕТОДОМ  -ОБЛАСТЕЙ
-ОБЛАСТЕЙ
Аннотация
В статье описан итерационный метод оценки параметров модельной функции квазидетерминированного сигнала в предположении об интервальном характере области значений функции сопровождения. Предложено по допустимой области значений параметров модельной функции осуществлять оценку состояния объекта контроля в информационно-измерительных и управляющих системах.
Ключевые слова: модельная функция, пространство параметров, оценка параметров.
Suchkova L.I.
PhD in Technical Sciences, assosiate professor, Altay State Technical University
ESTIMATION OF THE OBJECT STATE OF THE CONTROL BY MEANS OF THE  -AREAS METHOD
-AREAS METHOD
Abstract
In paper the iterative method of an estimation of parametres of modelling function a quasidetermined signal in the supposition about interval character of a range of values of function of support is described. It is offered to carry out on admissible range of values of parametres of modelling function an estimation of a condition of object of the control in informational-measuring and controlling systems.
Кeywords: modelling function, space of parametres, estimation of parametres.
Состояние объекта контроля оценивается, как правило, путем анализа сигналов с первичных измерительных преобразователей. Будем считать, что сигнал является в общем случае функцией пространственно-временных координат rТ={x,y,z,t} и вектора параметров  . Область координат разбита на множество доменов DM={dmq}, |DM|=Q, в каждом из которых сигнал характеризуется своей моделью поведения. Для границ каждого домена dmq выполняется условие интервальности, согласно которому область определения каждой границы D задана не жестко, а может варьироваться в пределах интервалов неопределенности по каждому измерению вектора r. Пусть с учетом погрешностей измерений и влияния случайных факторов модель реального сигнала в каждом домене q имеет вид:
. Область координат разбита на множество доменов DM={dmq}, |DM|=Q, в каждом из которых сигнал характеризуется своей моделью поведения. Для границ каждого домена dmq выполняется условие интервальности, согласно которому область определения каждой границы D задана не жестко, а может варьироваться в пределах интервалов неопределенности по каждому измерению вектора r. Пусть с учетом погрешностей измерений и влияния случайных факторов модель реального сигнала в каждом домене q имеет вид:
 (1)
(1)
где  - наблюдаемая реализация сигнала,
- наблюдаемая реализация сигнала, - определенная с точностью до параметров модельная функция, описывающая сигнал, с номером типа m из группы функций
- определенная с точностью до параметров модельная функция, описывающая сигнал, с номером типа m из группы функций  - функция сопровождения. Аналитический вид функции сопровождения
- функция сопровождения. Аналитический вид функции сопровождения  неизвестен, однако область ее значений ограничена в силу ограниченности амплитуды реального сигнала. Рассмотрим случай, когда область значений функции сопровождения принадлежит интервалу
неизвестен, однако область ее значений ограничена в силу ограниченности амплитуды реального сигнала. Рассмотрим случай, когда область значений функции сопровождения принадлежит интервалу  , где
, где  - неотрицательные величины, для которых выполняются соотношения
- неотрицательные величины, для которых выполняются соотношения  . Ансамбль образует слой неопределенности в окрестности модельной функции, толщина которого в общем случае может зависеть от r. Основным требованием к модельной функции является непрерывность и простота вычисления в реальном времени на устройстве с ограниченными вычислительными возможностями. Для компонент вектора
. Ансамбль образует слой неопределенности в окрестности модельной функции, толщина которого в общем случае может зависеть от r. Основным требованием к модельной функции является непрерывность и простота вычисления в реальном времени на устройстве с ограниченными вычислительными возможностями. Для компонент вектора  в общем случае не выполняется условие независимости, и их интервальные оценки представляют собой область в пространстве параметров, которая должна изменяться в процессе обработки данных реализации сигнала.
в общем случае не выполняется условие независимости, и их интервальные оценки представляют собой область в пространстве параметров, которая должна изменяться в процессе обработки данных реализации сигнала.
Метод нахождения интервальных оценок параметров  при условии ограниченности области значений функции сопровождения Фq(r) будем реализовывать как итерационную процедуру, на каждом шаге которой осуществляется уточнение границ области допустимых значений интервальных оценок в пространстве параметров и сравнение этой области с областью значений параметров, соответствующих либо нештатной ситуации на объекте контроля, либо его штатному состоянию.
при условии ограниченности области значений функции сопровождения Фq(r) будем реализовывать как итерационную процедуру, на каждом шаге которой осуществляется уточнение границ области допустимых значений интервальных оценок в пространстве параметров и сравнение этой области с областью значений параметров, соответствующих либо нештатной ситуации на объекте контроля, либо его штатному состоянию.
Для простоты вектор r представим единственной временной компонентой t, что не является принципиальным ограничением. Определение области L допустимых текущих интервальных значений параметров  осуществляется в соответствии с типом модельной функции. Для простоты изложения метода возьмем линейную модельную функцию
осуществляется в соответствии с типом модельной функции. Для простоты изложения метода возьмем линейную модельную функцию  .
.
На первом шаге метода по реализации сигнала в точках r=0 и r=dr с учетом области значений функции сопровождения вычисляется интервал для параметра  , так как согласно типу модельной функции параметр
, так как согласно типу модельной функции параметр  при r=0 не влияет на ее значение. При этом верхняя
при r=0 не влияет на ее значение. При этом верхняя  и нижняя
и нижняя  границы оценки параметра равны
границы оценки параметра равны
 (2)
(2)
Цифра в верхнем индексе параметра соответствует номеру итерации алгоритма. Оценки верхней и нижней границ параметра зависят от значений параметра , поэтому будем вычислять оценки параметра в точках, где параметр принимает минимально и максимально возможные значения (рисунок 1):
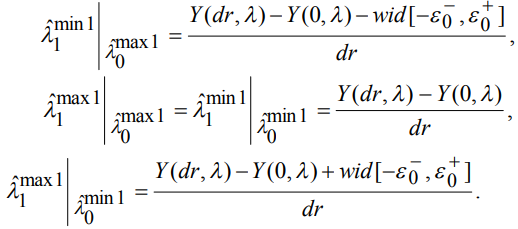 (3)
(3)
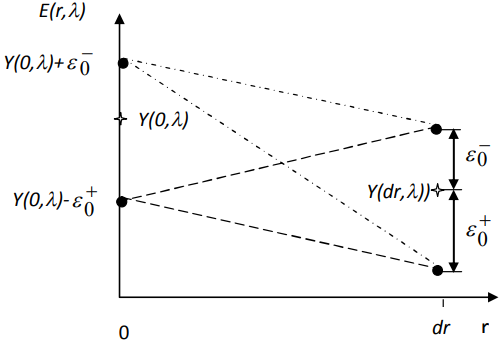
Рис. 1 - Оценка параметров модельной функции  на первой итерации метода e-областей
на первой итерации метода e-областей
Вычисленные по формулам (2) и (3) интервальные оценки компонент вектора параметров  формируют в пространстве параметров четырехугольник с вершинами, соответствующими минимальным и максимальным значениям параметров. Будем называть область допустимых интервальных оценок компонент вектора параметров при наложенных ограничениях на область изменения функции сопровождения Ф(r)
формируют в пространстве параметров четырехугольник с вершинами, соответствующими минимальным и максимальным значениям параметров. Будем называть область допустимых интервальных оценок компонент вектора параметров при наложенных ограничениях на область изменения функции сопровождения Ф(r)  -областью. Обозначим
-областью. Обозначим  -область, полученную на первой итерации работы алгоритма через ОЕ1, она же на первом шаге будет результирующей областью OR допустимых значений параметров.
-область, полученную на первой итерации работы алгоритма через ОЕ1, она же на первом шаге будет результирующей областью OR допустимых значений параметров.
На последующих шагах алгоритма по реализации сигнала в точках r=i*dr и r=(i+1)*dr для  по формулам (4) вычисляются нижняя и верхняя границы оценок
по формулам (4) вычисляются нижняя и верхняя границы оценок  и
и  параметра 0, а также нижние и верхние границы оценок параметра 1 для различных значений параметра :
параметра 0, а также нижние и верхние границы оценок параметра 1 для различных значений параметра :
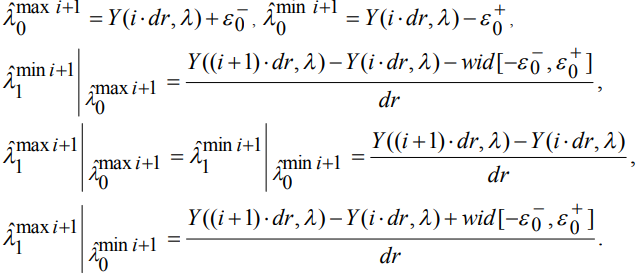 (4)
(4)
Вычисленные по (4) значения являются координатами вершин четырехугольника, образующего  -область ОЕi+1 в пространстве параметров в соответствии с обходом вершин против часовой стрелки. Для формирования результирующей
-область ОЕi+1 в пространстве параметров в соответствии с обходом вершин против часовой стрелки. Для формирования результирующей  -области OR допустимых значений параметров модельной функции на каждой итерации необходимо определять пересечение текущей области OR и
-области OR допустимых значений параметров модельной функции на каждой итерации необходимо определять пересечение текущей области OR и  -области
-области  , координаты вершин которой получены из координат вершин
, координаты вершин которой получены из координат вершин  -области ОЕi+1 путем переноса начала координат из точки (i*dr,0) в точку (0,0). В общем случае задача определения результирующей
-области ОЕi+1 путем переноса начала координат из точки (i*dr,0) в точку (0,0). В общем случае задача определения результирующей  -области OR сводится к задаче определения координат вершин многоугольника, являющегося пересечением текущей
-области OR сводится к задаче определения координат вершин многоугольника, являющегося пересечением текущей  -области OR, сформированной по истории реализации сигнала, и
-области OR, сформированной по истории реализации сигнала, и  -области
-области  . При решении этой задачи использовался метод О’Рурка. На каждом этапе алгоритма происходит уменьшение площади результирующей
. При решении этой задачи использовался метод О’Рурка. На каждом этапе алгоритма происходит уменьшение площади результирующей  -области, что соответствует уточнению интервальных оценок параметров модельной функции и снижению неопределенности по мере появления информации об очередных отсчетах реализации контролируемого сигнала (рисунок 2).
-области, что соответствует уточнению интервальных оценок параметров модельной функции и снижению неопределенности по мере появления информации об очередных отсчетах реализации контролируемого сигнала (рисунок 2).
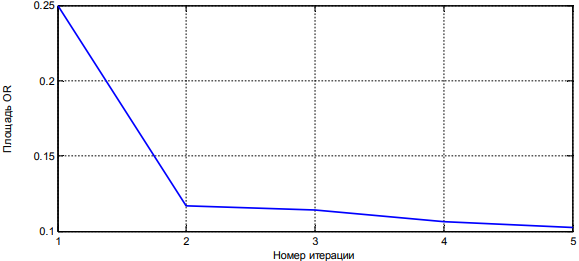
Рис. 2 – Уточнение оценок параметров модельной функции в методе -областей
Разработанный метод может быть использован при онлайновом контроле состояний объектов мониторинга в информационно-измерительных и управляющих системах.
Литература
1. Шокин Ю.И. Интервальный анализ. - Новосибирск: Наука, 1981.- 112 с.
2. Калмыков, С.А. Методы интервального анализа / С.А. Калмыков, Ю.И. Шокин, З.Х. Юлдашев. – Новосибирск: Наука, 1986. – 224 с.
3. Шарый С.П. Конечномерный интервальный анализ. – XYZ, 2012. http://www.nsc.ru/interval/Library/InteBooks/SharyBook.pdf (дата обращения 12.02.2013).
4. Сучкова, Л.И. Применение интервальных оценок в приборах и методах контроля для выделения информационных параметров квазидетерминированных сигналов / Л.И. Сучкова, А.Г. Якунин. – Вестник Югорского государственного университета - Вып. 2(21), 2011. - С. 69-81.
Список литературы
Шокин Ю.И. Интервальный анализ. - Новосибирск: Наука, 1981.- 112 с.
Калмыков, С.А. Методы интервального анализа / С.А. Калмыков, Ю.И. Шокин, З.Х. Юлдашев. – Новосибирск: Наука, 1986. – 224 с.
Шарый С.П. Конечномерный интервальный анализ. – XYZ, 2012. http://www.nsc.ru/interval/Library/InteBooks/SharyBook.pdf (дата обращения 12.02.2013).
Сучкова, Л.И. Применение интервальных оценок в приборах и методах контроля для выделения информационных параметров квазидетерминированных сигналов / Л.И. Сучкова, А.Г. Якунин. – Вестник Югорского государственного университета - Вып. 2(21), 2011. - С. 69-81.
Список литературы
Шокин Ю.И. Интервальный анализ. - Новосибирск: Наука, 1981.- 112 с.
Калмыков, С.А. Методы интервального анализа / С.А. Калмыков, Ю.И. Шокин, З.Х. Юлдашев. – Новосибирск: Наука, 1986. – 224 с.
Шарый С.П. Конечномерный интервальный анализ. – XYZ, 2012. http://www.nsc.ru/interval/Library/InteBooks/SharyBook.pdf (дата обращения 12.02.2013).
Сучкова, Л.И. Применение интервальных оценок в приборах и методах контроля для выделения информационных параметров квазидетерминированных сигналов / Л.И. Сучкова, А.Г. Якунин. – Вестник Югорского государственного университета - Вып. 2(21), 2011. - С. 69-81.