МЕТОДИКА ОБОСНОВАНИЯ ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ НОВОГО ЗАХВАТНО-ПОВОРОТНОГО УСТРОЙСТВА ДЛЯ ЗАВИНЧИВАНИЯ СВАЙ

Валеев А.В.
ORCID: 0000-0002-8028-0748,
Военный институт (ЖДВ и ВОСО), г. Санкт-Петербург
МЕТОДИКА ОБОСНОВАНИЯ ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ НОВОГО ЗАХВАТНО-ПОВОРОТНОГО УСТРОЙСТВА ДЛЯ ЗАВИНЧИВАНИЯ СВАЙ
Аннотация
В работе рассмотрены теоретические аспекты взаимодействия нового устройства с винтовой сваей. Преимуществом данного устройства перед существующими аналогами является возможность захвата сваи в любом месте ствола. В настоящее время использование винтовых свай довольно распространено. Область их применения возможна на разных грунтах. В связи с этим разработана методика обоснования эксплуатационно-технических параметров нового захватно-поворотного устройства для погружения винтовых свай. Предложена зависимость для оценки времени погружения винтовых свай, которая подтверждена экспериментально.
Ключевые слова: винтовая свая, захватно-поворотное устройство, эксплуатационно-технические параметры.
Valeev A.V.
ORCID: 0000-0002-8028-0748,
St. Petersburg Railway Troops Military Transportation Institute, St. Petersburg
METHOD OF SUBSTANTIATION FOR OPERATING AND TECHNICAL PARAMETERS OF NEW CAPTURE AND TURNING DEVICE FOR PILE SCREWING
Abstract
The theoretical aspects of the interaction of a new device with a screw pile are considered in the paper. The advantage of this device over existing analogues is the ability to capture piles anywhere in the trunk. Currently, the use of screw piles is quite common. They can be applied on different soils. In this regard, a technique has been developed to justify the operational and technical parameters of a new capture and turning device for diving screw piles. A dependence is proposed for estimating the immersion time of screw piles, which is confirmed experimentally.
Keywords: screw pile, capture and turning device, operational and technical parameters.
В новых условиях военно-политической обстановки в мире появилась угроза обострения региональных проблем, в основе которых лежат политические, экономические, территориальные, национальные и другие противоречия. Одним из направлений решения этой проблемы является сокращение сроков восстановления и строительства мостов. При восстановлении могут быть использованы винтовые сваи [1, C. 121], [2], [3] в фундаментах опор мостов. Это вызвано их повышенной несущей способностью, а также влияет на сокращение предполагаемых сроков восстановления. В связи с этим разработка, создание и производство эффективного захватно-поворотного устройства для погружения винтовых свай фундаментов опор мостов [10] является актуальной научной и практической задачей.
В настоящее время промышленностью выпускается парк машин для погружения винтовых свай, у которых основной элемент, захватно-поворотные устройства, имеют различную конструкцию. Однако, из всех этих типов, нет ни одного захватно-поворотного устройства, которое бы полностью удовлетворяло условиям восстановления и строительства мостов на железных дорогах.
Предлагаемое новое устройство для завинчивания свай [6] представлено на рисунке 1.
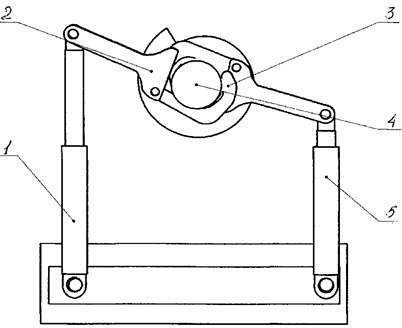
Рис. 1 – Конструкция устройства для завинчивания свай:
1, 3 – гидроцилиндр, 2 – неподвижная часть захватно-поворотного устройства, 3 – подвижная часть захватно-поворотного устройства, 4 – ствол сваи
В основе предлагаемого устройства лежит принцип передачи крутящего момента за счет использования упруго-пластических деформаций и контактных напряжений, возникающих при взаимодействии механического захвата с погружаемой сваей.
Теоретические исследования процесса взаимодействия захватно-поворотного устройства с винтовой сваей позволили уточнить выходные геометрические параметры и выявить основные характеристики: диаметр завинчиваемой сваи; создаваемый крутящий момент; расстояние от шарнира крепления гидроцилиндра; расстояние крепления шарнира гидроцилиндра к базовой машине до вертикальной оси завинчивания сваи; длина рукоятки одношарнирного ключа (кривошипа); длина гидроцилиндра (кулисы); длина штока гидроцилиндра (ползуна); усилие давления штока гидроцилиндра на рукоятку одношарнирного ключа; ширина губок ключа; угол при вершине зубца рифления; время погружения винтовой сваи; усилие давления ключа на стенки ствола сваи в зависимости от момента при завинчивании. Рассмотренные показатели определяют силовое воздействие захватно-поворотного устройства на сваю, а также дают возможность рассчитать усилия в шарнирах устройства, характеризующие функциональные взаимосвязи между геометрическими параметрами кинематической схемы и основными эксплуатационно-техническими параметрами, определяющими общую конструкцию устройства для завинчивания свай на основе предлагаемой методики, состоящей из двух основных этапов (рис. 2).
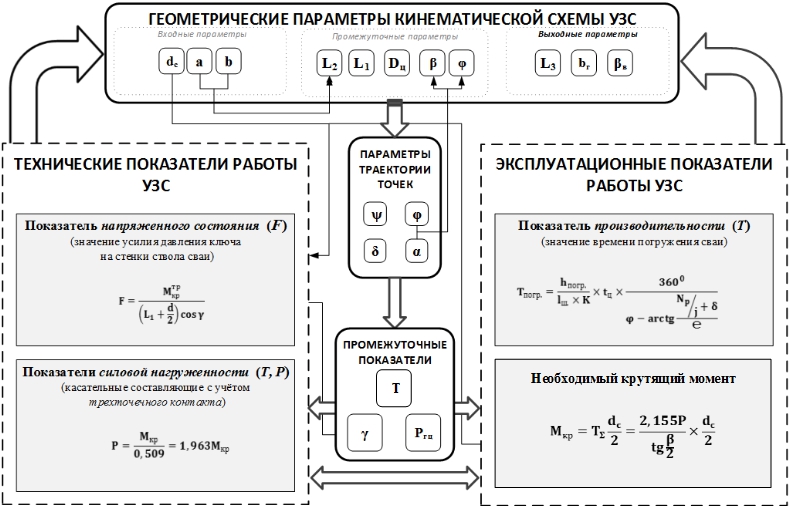
Рис. 2 – Основные этапы предлагаемой методики
Первый этап – обоснование технических параметров захватно-поворотного устройства.
Второй этап – определение эксплуатационных параметров захватно-поворотного устройства.
Условия размещения и рабочие размеры базовой машины позволяют определить промежуточные геометрические параметры [4], [5, С 64] нового устройства.
Для этого принимаются значения расстояния от шарнира крепления гидроцилиндра к базовой машине до места завинчивания сваи – а (рис. 3). Из сопоставления значений характеристик – (a, b, L1) предварительно задаются значениями длины гидроцилиндра – L2 и длины штока гидроцилиндра – L3.
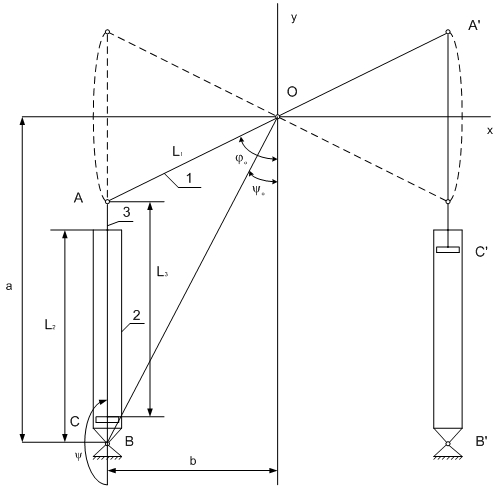
Рис. 3 – Расчетная схема захватно-поворотного устройства
На основании зависимости ![]() , определяется рациональное расстояние крепления шарнира гидроцилиндра к базовой машине до вертикальной оси завинчивания сваи. Значение характеристики проверяется на соответствие габаритным размерам базовой машины.
, определяется рациональное расстояние крепления шарнира гидроцилиндра к базовой машине до вертикальной оси завинчивания сваи. Значение характеристики проверяется на соответствие габаритным размерам базовой машины.
Сопоставление рабочих размеров базовой машины с положением вертикальной оси по выбранной расчетной схеме позволили определить один из основных выходных геометрических параметров ‑ длину рукоятки одношарнирного ключа – L1.
Следующим шагом первого этапа является определение рациональной величины угла β при вершине зубца рифления. Схема динамического воздействия устройства на сваю представлена на рисунке 4.
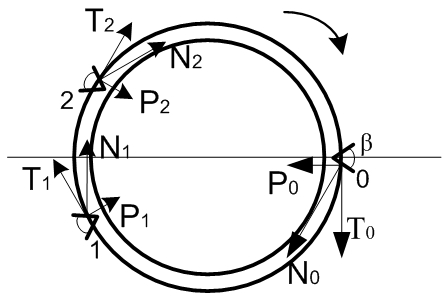
Рис. 4 – Схема динамического воздействия устройства на сваю
Данная величина (β) зависит от диаметра сваи (d), крутящего момента (Mкр), давления (Pс), приложенного к стенке сваи рукояткой ключа (L1), с учетом трехточечного контакта при котором возникают касательные составляющие Т (T0, T1, T2). Анализ динамического воздействия ключа на сваю позволил выразить зависимости данных величин в следующем виде:
![]()
Данная зависимость в свою очередь позволила определить один из промежуточных показателей захватно-поворотного устройства ‑ давление ключа на сваю (Pс) для создания необходимого крутящего момента (Mкр):
![]() , при β=60° и dc=0,273м.
, при β=60° и dc=0,273м.
Помимо прочего, как уже было установлено, изменение некоторых параметров кинематической схемы захватно-поворотного устройства может приводить к неоднозначному изменению показателей ее работы. То есть, в то время, как одни показатели могут улучшаться, другие ухудшаться, и те параметры, значения которых являлись рациональными в отношении одних показателей, в отношении других могут иметь далеко не рациональные значения.
С целью разрешения данного противоречия, при котором величина давления (Pс) влияет на напряженно-деформированное состояние [7], [8], [9, C. 18] стенки ствола сваи при воздействии одношарнирного ключа, необходимо выполнить третий шаг первого этапа – оценить напряженное состояние в стенке ствола сваи.
Показателем напряженного состояния является значение усилия давления ключа на стенки ствола сваи (F) в зависимости от требуемого крутящего момента ![]() :
:
![]() ,
,
где: ![]() – требуемый крутящий момент.
– требуемый крутящий момент.
Значение давления усилия давления ключа на стенки ствола сваи (F) и рабочее давление в гидросистеме базовой машины (Pраб) определяет требуемый диаметр поршня гидроцилиндра ![]() :
:
![]() .
.
По расчетным значениям ![]() , L2 и L3 из стандартного ряда выбирается требуемый гидроцилиндр.
, L2 и L3 из стандартного ряда выбирается требуемый гидроцилиндр.
Учитывая стандартные размеры выбранных гидроцилиндров, определяются выходные геометрические параметры кинематической схемы (рис. 3).
Оценку напряженного состояния сваи, определяют по значению (bг) методом конечных элементов, с применением программы моделирования FRAME CAD для наглядного представления эпюры изгибающих моментов.
Получение величины рабочей поверхности (bг), а также таких геометрических параметров захватно-поворотного устройства, как длина рукоятки ключа (L1), является конечной целью первого этапа.
Целью второго этапа является расчет эксплуатационных показателей работы захватно-поворотного устройства.
Одним из основных показателей предлагаемого устройства является время, необходимое для погружения сваи на определенную глубину (Тпогр).
Принимая во внимание наличие холостого хода рукоятки вследствие возникновения упругой деформации в зонах контакта, время необходимое для погружения сваи рассчитывается как:
 .
.
Продолжительность времени погружения винтовой сваи складывается из следующих составляющих:
![]() ,
,
где ![]() ‑ продолжительность операций по переводу копра из транспортного положения в рабочее (установка копра);
‑ продолжительность операций по переводу копра из транспортного положения в рабочее (установка копра);
![]() ‑ время на подготовку сваи к погружению;
‑ время на подготовку сваи к погружению;
![]() ‑ время, необходимое на проведение вспомогательных операций.
‑ время, необходимое на проведение вспомогательных операций.
Общая продолжительность времени погружения винтовой сваи будет равна:
Таким образом, предложенная методика позволяет определить эксплуатационно-технические характеристики нового устройства для завинчивания свай на основании заданных технических показателей с учетом габаритных ограничений базового шасси и заданной эксплуатационной производительности.
Список литературы / References
- Валеев А.В. К вопросу выбора способа погружения свай / А.В. Валеев // Научно – технический сборник. Выпуск № 22 ч.II. – 2011. – С. 121-125.
- Шапиро Л.Б. Рабочие мостики на винтовых сваях / Л.Б. Шапиро, С.Р. Владимирский, В.Н. Железков // Транспортное строительство – 1987. ‑ №12. ‑ С. 18-19.
- Железков В.Н. Винтовые сваи в энергетической и других отраслях строительства: монография / В.Н. Железков. – С-Пб.: ПРАГМА, 2004. – 128 с.
- Горохов В.А. Проектирование и расчет приспособлений. Учебное пособие для студентов вузов машиностроительных специальностей / В.А.Горохов.‑ Минск: 1986 – 238с.
- Фролов К.В. Теория механизмов и механика машин. Учебник для вузов / К.В. Фролов. ‑ 3-е изд. – М.: Высшая школа, 2001. ‑ 496 с.
- Валеев А.В. Устройство для завинчивания свай / А.В. Валеев Патент на полезную модель RU104946 – М.: ФГУ ФИПС. ‑ 2011.
- Janson L.E. Plastics pipes for water supply sewage disposal / L.E. Janson. ‑ Borealis. ‑1996.
- Джонсон К. Механика контактного взаимодействия / К. Джонсон.-М.: Мир, 1989. ‑ 508 с.
- Valeev A.V. On the flexural strains in the walls of the barrel screw piles with her screwing odnošarnirnymi pipe wrenches. European Applied Studies: modern approaches in scientific researches, 2nd International scientific conference / V. Valeev, S.A. Mihal'kov. ‑ ORT Publishing. Stuttgart. 2013. ‑ P. 18-21.
- Железков В.Н., Качановская Л.И. Винтовые сваи в строительстве. Геотехника: актуальные теоретические и практические проблемы. Сборник трудов. СПбГАСУ, 2006. ‑ С. 37-43.
Список литературы на английском языке / References in English
- Valeev A.V. K voprosu vybora sposoba pogruzhenija svaj [To a question of the choice of a way of immersion of piles] / A.V. Valeev // Nauchno – tehnicheskij sbornik. Vypusk № 22 ch.II [Scientifically – the technical collection. Release № 22 of the p. II]. – 2011. – P. 121-125 [in Russian]
- Shapiro L.B. Rabochie mostiki na vintovyh svajah [Working bridges on screw piles] / L.B. Shapiro, S.R. Vladimirskij, V.N. Zhelezkov // Transportnoe stroitel'stvo [Transport construction] – 1987. ‑ № 12. ‑ P. 18-19 [in Russian]
- Zhelezkov V.N. Vintovye svai v jenergeticheskoj i drugih otrasljah stroitel'stva: monografija [Screw piles in power and other branches of construction monograph] / V.N. Zhelezkov. – S-Pb.: PRAGMA, 2004. – 128 p. [in Russian]
- Gorohov V.A. Proektirovanie i raschet prisposoblenij. [Projection and calculation of devices] Uchebnoe posobie dlja studentov vuzov mashinostroitel'nyh special'nostej / V.A.Gorohov. ‑ Minsk: 1986 – 238 p. [in Russian]
- Frolov K.V. Teorija mehanizmov i mehanika mashin. [Theory of mechanisms and mechanic of cars] Uchebnik dlja vuzov / K.V. Frolov. -‑3-d ed. – M.: Vysshaja shkola, [Higher School] 2001. ‑ 496 p. [in Russian]
- Valeev A.V. Ustrojstvo dlja zavinchivanija svaj [Ustroystvo for screwing up of piles] / A.V. Valeev Patent na poleznuju model' RU104946 [the Patent for the useful RU104946 model] – M.: FGU FIPS. ‑ 2011. [in Russian]
- Janson L.E. Plastics pipes for water supply sewage disposal / L.E. Janson. - Borealis. ‑1996.
- Dzhonson K. Mehanika kontaktnogo vzaimodejstvija [Mechanics of contact interaction] / K. Dzhonson. ‑ M.: Mir, [World] 1989. ‑ 508 p. [in Russian]
- Valeev A.V. On the flexural strains in the walls of the barrel screw piles with her screwing odnošarnirnymi pipe wrenches. European Applied Studies: modern approaches in scientific researches, 2nd International scientific conference / A.V. Valeev, S.A. Mihal'kov. ‑ ORT Publishing. Stuttgart. 2013. ‑ P. 18-21.
- Zhelezkov V.N., Kachanovskaja L.I. Vintovye svai v stroitel'stve. Geotehnika: aktual'nye teoreticheskie i prakticheskie problemy. [Screw piles in construction. Geotechnics: current theoretical and practical problems.] Sbornik trudov. SPbGASU, 2006. ‑ P. 37-43. [in Russian]