АРХИТЕКТУРА И ИСПОЛНЕНИЕ АВТОНОМНОЙ ИНЕРЦИАЛЬНО-РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ МИКРОНАВИГАЦИИ В АВИАЦИОННЫХ МНОГОФУНКЦИОНАЛЬНЫХ РАДАРАХ
АРХИТЕКТУРА И ИСПОЛНЕНИЕ АВТОНОМНОЙ ИНЕРЦИАЛЬНО-РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ МИКРОНАВИГАЦИИ В АВИАЦИОННЫХ МНОГОФУНКЦИОНАЛЬНЫХ РАДАРАХ
Аннотация
Предложены архитектура и варианты исполнения автономной системы инерциально-радиотехнической микронавигации в авиационных многофункциональных радиолокаторах, логика функционирования и режимы микронавигации при наличии или при отсутствии радиопомех для глобальных навигационных спутниковых систем, схемы и алгоритмические структуры комплексной обработки инерциально-радиотехнической информации на основе процедур обобщенной фильтрации Калмана и ее модификаций. Рассмотренная нетрадиционная схема комплексирования и циклограмма процедур комплексной обработки РЛ-инерциальной информации позволяют исключить причины снижения точности и расходимости калмановской фильтрации, связанные с фазовыми искажениями (асинхронностью, запаздыванием) и коррелированностью измерений, а также повысить устойчивость процесса РЛ коррекции при возможных срывах измерений в отдельных РЛ каналах.
1. Введение
В настоящее время в состав аппаратуры авиационных многофункциональных радаров (РЛС), как правило, включена специализированная система микронавигации (СМН) фазового центра антенны (ФЦА) РЛС , , интегрированная с РЛС на аппаратно-алгоритмическом уровне и обеспечивающая высокоточное определение траекторных параметров ФЦА и параметров ориентации главного луча РЛС (ГЛ) на относительно коротких (секундных) временных интервалах в зафиксированной на это время нормальной земной системе координат. Традиционно такие СМН представляют собой интегрированную инерциально-спутниковую систему с датчиками первичной информации, размещенными вблизи ФЦА, информационно взаимодействующую с РЛС и штатным навигационным комплексом (НК) летательного аппарата (ЛА) – носителя РЛС , , . В то же время отмечается существенное усложнение сигнально-помеховой обстановки при работе глобальных навигационных спутниковых систем (ГНСС) из-за организованных радиопомех. Возникает необходимость пересмотра концепции, архитектуры (внешнего функционального проявления), исполнения (внутренней структуры) и аппаратной реализации традиционных инерциально-спутниковых СМН, учитывая возрастающую вероятность их продолжительной работы при отсутствии достоверной информации от бортовой аппаратуры потребителя ГНСС, используемой в СМН в качестве высокоточного позиционного или позиционно-скоростного корректора для инерциальных датчиков СМН. Следует отметить, что информационное взаимодействие СМН со штатным НК ЛА и/или с отдельными подсистемами/датчиками из состава НК во многих случаях не представляется возможным (не обеспечивается интерфейсом) или не является эффективным (вследствие асинхронности и несогласованности измерений НК и СМН, неконтролируемых задержек при обмене, недостаточной для задач микронавигации точностью данных, получаемых от НК). В ряде случаев ЛА-носитель не имеет полноценного НК, а состав его бортового оборудования не представляет практического интереса в аспекте микронавигации РЛС. В данной работе СМН концептуально рассматривается как автономная система в структуре РЛС, которая практически не взаимодействует с НК ЛА и функционирует только на основе измерительной информации от традиционных датчиков первичной информации СМН (приемная антенна ГНСС, бесплатформенный блок инерциальных чувствительных элементов) и непосредственно от самой РЛС, также рассматриваемой как датчик микронавигационной информации. По физическим принципам получения первичной измерительной информации такая автономная система – инерциально-радиотехническая (ИР).
В целом, объектом исследования является автономная ИР (АИР) СМН в типовой многофункциональной РЛС авиационного базирования, обеспечивающей обзор воздушного пространства (ОВП) и обзор земной поверхности (ОЗП), в т. ч. ОЗП с высоким разрешением при синтезируемой апертуре (СА) антенны , . Цель данной работы – представление основных положений, определяющих архитектуру, исполнение, логику и режимы функционирования АИР СМН в полете, в т. ч. «на фоне» решения в РЛС ее основных функциональных задач ОВП и ОЗП и условиях организованных помех ГНСС.
2. Методы и принципы исследования
Исследуемая/разрабатываемая АИР СМН, в общем случае, обеспечивает определение параметров траектории ФЦА/ориентации ГЛ радара при решении РЛС задач ОВП, включая обнаружение, измерение траекторных параметров и сопровождения траекторий воздушных объектов, а также задач ОЗП, включая ОЗП с высоким/сверхвысоким разрешением при СА. Кроме того, в СМН, как назначаемая опция решаются и традиционные задачи навигации/ориентации ЛА в общепринятой геодезической (навигационной) системе координат. При назначении такой опции радар со «встроенной» АИР СМН в аспекте архитектуры можно рассматривать как «радиолокационно-навигационный комплекс», который может быть резервным или основным средством традиционной навигации ЛА – в зависимости от уровня оснащенности ЛА бортовым навигационным оборудованием. Реализация этой опции, по сути, сводящаяся к переходу от навигации ФЦА к навигации удаленного от ФЦА центра масс ЛА, не является проблематичной и далее в работе детально не рассматривается. Актуальной остается проблема обеспечения требуемой точности микронавигации ФЦА при СА. В задачах ОВП – менее «жесткие» требования по точности, но в условиях организованных помех ГНСС их выполнение также является проблематичным. В настоящее время усложнение сигнально-помеховой обстановки для ГНСС является устойчивой тенденцией, затрудняющей решение указанной проблемы достижения требуемой точности микронавигации ФЦА.
На данный момент, наряду с разработками по повышению помехоустойчивости аппаратуры ГНСС, ведутся интенсивные исследования в области нетрадиционных методов и средств «неспутниковой» (микро)навигации и в т. ч. рассматриваются возможности использования самой РЛС как дополнительного корректирующего датчика скорости ФЦА в информационно-измерительной структуре СМН радара. Например, в работе показана возможность высокоточного измерения радиальной скорости ФЦА по направлению ГЛ в моноимпульсном режиме с низкой частотой повторения импульсов (ЧПИ). В работах , , , в качестве датчика скорости рассмотрена типовая РЛС с квазинепрерывным излучением (КНИ) при высокой/ высокой средней ЧПИ, в т. ч. и при линейной частотной модуляции несущего колебания в пачке импульсов. Применительно к режимам КНИ разработаны , , , :
• методы измерения дальности R от ФЦА до земли и радиальной скорости ФЦА VR при КНИ и КНИ с ЛЧМ;
• процедуры определения траекторной скорости ФЦА V по нескольким измерениям скорости VR(k) (k≥3), выполненным при разных направлениях ГЛ;
• схема комплексирования и базовые алгоритмы комплексной обработки инерциально-радиолокационной информации по скорости ФЦА на основе метода обобщенной фильтрации Калмана (ОФК) .
На рис. 1 показана упрощенная структурно-функциональная схема АИР СМН, сформированная с учетом вышеуказанных наработок , , , . В отличие от типовых инерциально-спутниковых СМН, в АИР СМН реализуется «глубокая» функциональная интеграция СМН и радара, как уровне их информационного взаимодействия, так по контуру управления направлением ГЛ, параметрами КНИ и первичной обработкой принимаемых сигналов.
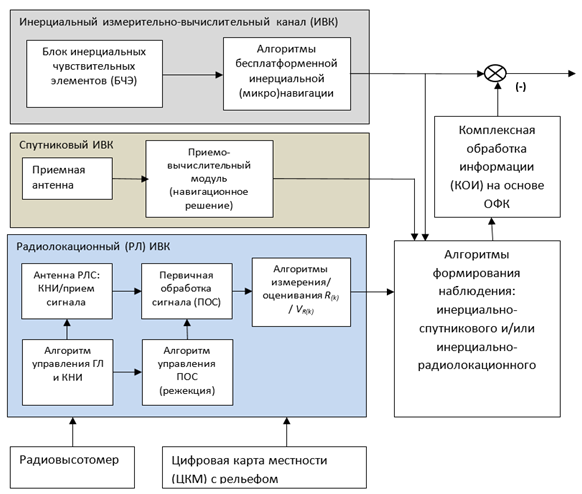
Рисунок 1 - Упрощенная структурно-функциональная схема АИР СМН
Аналогично, при одновременной информационной «избыточности» по скорости ФЦА, обеспечиваемой ГНСС- и РЛ-каналами, реализуется функциональный режим ИРЛС. При этом формируются традиционные инерциально-спутниковые наблюдения как разность проекций скорости ФЦА в осях сопровождающего трехгранника oENH геодезической системы координат, определяемых в инерциальном и спутниковом каналах:
(1) где Т – транспонирование; и
– соответственно проекции траекторной скорости ФЦА в инерциальном и спутниковом каналах.
Одновременно и аналогично формируются и РЛ-инерциальные наблюдения вида
где – проекции траекторной скорости ФЦА, вычисленные на основе координатных преобразований нескольких РЛ-измерений радиальной скорости VR(k) (k≥3) при разных направлениях оси ГЛ, т. е. при реализации k каналов РЛ измерений.
В общем случае, задача коррекции инерциального канала СМН сводится к нахождению оптимальной – в смысле минимума дисперсии – несмещенной состоятельной оценки вектора состояния ошибок Xi инерциального канала и к компенсации этих ошибок. Решение задачи находится из следующих уравнений ОФК :
где Рi/k – ковариационная матрица размерности n×n погрешностей оценки вектора состояния; - оценка вектора состояния Xi размерности n на i-ом шаге по наблюдению Zk на k-ом шаге; Hi – матрица связи вектора состояния с вектором наблюдения размерности l×n; l – размерность вектора наблюдения; Ri – ковариационная матрица погрешностей измерений; Фi = Ф(ti, ti-1) – переходная матрица для вектора состояния ошибок инерциального канала; Гi = Г (ti, ti-1) – переходная матрица для интенсивностей шумов Qi-1/i-1 инерциального канала.
Для l статистически независимых компонент zj, j = 1,..,l вектора наблюдения Zi оптимальная скорректированная оценка вектора состояния может находиться из следующих уравнений последовательной модификации ОФК :
где Mj – ковариационная матрица погрешностей оценки mj вектора Xi по наблюдению zj; Rj – дисперсия погрешностей ϑj j-го внешнего (по отношению к инерциальному) канала измерения; Hj – вектор-строка коэффициентов связи наблюдения zj с вектором состояния Xi.
Отметим, что РЛ и спутниковые измерения скорости не являются коррелированными, а при обработке группы взаимно коррелированных компонент вектора наблюдения они могут быть приведены к последовательности некоррелированных путем выполнения следующих преобразований :
где Е – единичная матрица; Ri – ковариационная матрица взаимнокоррелированных шумов наблюдений.
В рассматриваемом режиме ИРЛС реализуется экстраполяция вида (3), (4) и последовательная коррекция вида (5) – (9), причем первые три компоненты (j = 1, 2, 3) соответствуют вектору (2) инерциально-РЛ наблюдения, а следующие компоненты (j = 4, 5, 6) – вектору (1) инерциально-спутникового РЛ наблюдения. Отметим, что по потенциальной точности РЛ измерения значительно уступают спутниковым. Однако при РЛ коррекции (j = 1, 2, 3) значительно снижается дисперсия погрешностей оценивания и при последующей спутниковой коррекции (j = 4, 5, 6) сокращается переходный процесс (увеличивается темп сходимости ОФК) и возрастает точность оценок вектора состояния.
При отсутствии информации от ГНСС в условиях организованных радиопомех режим ИРЛС «вырождается» в инерциально-радиолокационный режим. Для варианта обработки наблюдения вида (2) при последовательной модификации ОФК в табл. 1 приведены полученные на основе натурных экспериментов статистические характеристики – среднее значение и среднеквадратическое отклонение (СКО) – для разностей выходных данных ИРЛ режима по проекциям скорости ФЦА и аналогичных проекций, полученных по данным ГНСС – канала, которые принимались в качестве эталонных значений. При этом исследования варианты при трех и четырех каналах РЛ измерения радиальной скорости.
Таблица 1 - Статистические характеристики отклонений проекций скорости при ИРЛ режиме от данных, полученных от ГНСС
| По проекции VE | По проекции VN | По проекции VH | |||
3 канала | 4 канала | 3 канала | 4 канала | 3 канала | 4 канала | |
Среднее (м/с) | -0,07885 | - 0,006169 | 0,159559 | 0,162401 | -4,287672 | -0,624775 |
СКО (м/с) | 1,244801 | 1,095195 | 1,210298 | 1,108757 | 15,323342 | 5,493386 |
При отсутствии достоверной информации от ГНСС каналы РЛ измерений остаются единственным корректором в СМН и, в сравнении с ИРЛС, в ИРЛ режиме к этим корректирующим РЛ каналам предъявляются более высокие требования по точности.
Следует отметить, что при определении проекция траекторной скорости :
• используются измерения/оценки радиальной скорости VR(k) (при k=3 или k=4), полученные при последовательной переориентации ГЛ, а временной интервал между моментами начала излучения для двух разных направлений ГЛ будет, как минимум, равен длительности излучаемой пачки импульсов при КНИ, т. е. РЛ измерения не синхронны, а время от момента излучения первой пачки до момента определения проекций траекторной скорости ФЦА (время запаздывания) при 3…4 пачках импульсов обычно составляет ≈ 0,3…0,8 с;
• выполняются координатные преобразования с использованием измеряемых в инерциальном канале СМН углов рысканья (курса), крена и тангажа, т. е. в наблюдении вида (2) РЛ и инерциальные измерения являются коррелированными.
Очевидно, что эти обстоятельства нарушают корректность традиционной постановки задачи ОФК и могут приводить к снижению точности оценок, а ряде случаев и к практической расходимости процесса калмановской фильтрации .
С другой стороны, частота съема инерциальных измерений составляет сотни Гц и не составляет затруднений их синхронизация с относительно редкими РЛ измерениями, т. е. для момента излучения пачки импульсов для каждого k-го РЛ канала измерения радиальной скорости ФЦА можно сформировать разностное скалярное наблюдение вида
где – радиальная проекция траекторной скорости ФЦА, пересчитанная по измерениям инерциального канала на то же направление к поверхности земли, для которого проводилось измерение радиальной скорости
в k-ом РЛ канале.
Очевидно, что скалярное наблюдение (10) уже не содержит асинхронных инерциальных и РЛ измерений и эти измерения, не вносящие фазовых искажений, к тому же не являются взаимнокоррелированными. После прогноза (3), (4) осуществляется коррекция по аналогии с выражениями (7), (8) в последовательной модификации ОФК при j=1.
Таким образом, комплексную обработку информации в ИРЛ режиме целесообразно осуществлять на основе ОФК для скалярного наблюдения, формируемого в виде разности значений измеренной в РЛ канале и вычисленной (по инерциальным измерениям) радиальной составляющей скорости ФЦА. В целом, такая фильтрация последовательно реализуется применительно ко всем используемым в одном сеансе измерений РЛ каналам. Важно отметить, что наблюдения вида (2) возможно только в том случае, когда состоялись успешные измерения не менее, чем по трем задействованным РЛ каналам, т. е. когда возможен расчет проекций траекторной скорости ФЦА в сопровождающем трехграннике геодезической системы координат. При наблюдениях вида (9) сеанс ОФК состоится даже только при одном РЛ измерении и при «срывах» измерений во всех других РЛ каналах.
3. Заключение
Разработанная архитектура и варианты исполнения автономной инерциально-радиотехнической СМН многофункционального авиационного радара предполагают возможность решения в СМН задач традиционной навигации/ориентации носителя и микронавигации ФЦА/ориентации главного луча радара, в т. ч. и в условиях организованных радиопомех ГНСС, используя реализуемые в радаре каналы РЛ измерения траекторных параметров ФЦА. Предложенные нетрадиционная схема комплексирования и циклограмма процедур комплексной обработки РЛ-инерциальной информации позволяют исключить причины снижения точности и расходимости калмановской фильтрации, связанные с фазовыми искажениями (асинхронностью, запаздыванием) и коррелированностью измерений, а также повысить устойчивость процесса РЛ коррекции при возможных срывах измерений в отдельных РЛ каналах. Проблема повышения потенциальной точности микронавигационных РЛ измерений и устойчивости измерительного процесса (минимизации срывов измерений) на данный момент сохраняет актуальность, как и проблема повышения помехоустойчивости инерциально-РЛ режима при наличии аномальных погрешностей («выбросов»), характерных для радиотехнических измерений.