МОДЕЛИРОВАНИЕ ВЗЛЕТА КВАНТОМОБИЛЯ
МОДЕЛИРОВАНИЕ ВЗЛЕТА КВАНТОМОБИЛЯ
Аннотация
Перспектива внедрения квантомобилей, использующих тягу (траст) квантового двигателя-движителя (КДД), реализуемую в плоскости тангажа, приводит к необходимости рассмотрения возможностей и особенностей взлета этих машин. Аналогами могут являться летательные аппараты (ЛА). В отсутствие натурных транспортных средств (ТС) с КДД ставка в исследовании делается на программное имитационное моделирование (ПИМ), гибкую модель и мощное ПО.
Рассматриваются две смежных проблемных коллизии:
1) на фоне автомобильных и ЛА-аналогов – изменение структуры и роли подъемной силы при реализации лифта квантомобиля;
2) обеспечение непрерывного множества стратегий взлета – от самолетного разгонного варианта до вертолетного вертикального вывешивания.
Задачами разработки явились: создание в авторской Модели приземного движения квантомобиля (МПДК) Подсистемы взлета и вывешенного движения (ПВВД); отработка интерфейса взаимодействия с моделью; проведение ПИМ на базе МПДК с экспериментами, охватывающими некоторое множество вариантов взлета ТС.
Разработан алгоритм взлета и висения квантомобиля. Алгоритм реализован в среде Simulink-модели МПДК. Сформированная модель позволяет в ходе ПИМ процессов взлета квантомобиля прослеживать траектории изменения динамических показателей. Использованы графические возможности ПО Matlab.
В серии расчетов разгонов и вывешивания квантомобиля до назначенных высот при различных сценариях изменения величины и углов наклона вектора траста, сопротивления воздуха и подъемной силы, сопротивления качению по ОП и других факторов дана оценка стратегий и вариантов взлета квантомобиля, сформирован каркас опорных траекторий взлета.
Разработанная в среде МПДК подсистема ПВВД позволяет проводить расчетное исследование движения ТС в плоскости тангажа. На базе проведенных посредством МПДК с ПВДД расчетов и их анализа преодолена познавательная сложность формирования траекторий движения квантомобиля на стадии его взлета во взаимосвязи трастовой и аэродинамической подъемных сил. Наличие трастовой подъемной силы КДД является объединяющим фактором синтеза способов взлета CTOL, STOL и VTOL, охватываемых единым алгоритмом. МПДК рассматривается в качестве основы для дальнейшего развития моделирования движения квантомобиля в произвольных условиях.
1. Введение
На базе идей извлечения энергии из физического вакуума (ФВ)
, , в современной физике рассматриваются концепции квантовых двигателей (КД), генерирующих направленный траст (тягу) за счет определенной деформации поля ФВ , . Примером могут быть разработки российского ученого Леонова В.С. , . Надежда на практическую реализацию названых идей и концепций становится все более существенной , .Реализация идеи КД приведет к появлению нового типа транспортных средств (ТС) – квантомобилей
, , . Станет возможным прикладывать траст КД к корпусу экипажа (в конструктивно обусловленной точке) непосредственно (без трансмиссии). Необходимость трансмиссии отпадет, колесам (при наземном движении) останется только опорная функция.При возможности шарнирного (сферического) обметания вектора траста
, появляются его вертикальная и боковая компоненты, которые можно будет использовать для вывешивания (лифта) и бокового движения квантомобиля. Горизонтальная компонента траста при этом используется для преодоления сил сопротивления продольному движению экипажа , , (здесь и везде далее используем слово «экипаж» в смысле «коляска», но не команда). КД, с реализацией таким образом функций движителя ТС, становится силовой установкой типа Квантовый двигатель-движитель (КДД). В этой статье, однако, ограничимся рассмотрением действий КДД и экипажа в целом только в продольной плоскости тангажа.Автор ранее рассматривал концепции механики ТС с КДД
, , , . Причем, концепции охватывали, с одной стороны, возможность моделирования всесредного мультимодального квантомобиля (ВМК) , , , а с другой стороны, – моделирование смежных мобильных ТС: портовых и карьерных транспортеров, поездов . В монографии предложено в широкое понимание термина квантомобиль включать весь набор мобильных ТС с КДД (не только производное средство от «автомобиль»).В рамках продольного движения квантомобиля в плоскости развёртывания угла тангажа β вектор траста FT раскладывается на две ортогональные компоненты FTx и FTz , :
В скалярной записи это:
Угловой диапазон обметания вектора траста в общем случае составляет от 0° до 360°; взлет экипажа описывается в квадранте I (от 0° до 90°).
Рассмотренные концепции находятся в основе развиваемой авторской Simulink-модели приземного движения квантомобиля (МПДК)
.В публикациях
, , на базе МПДК рассмотрена методика и даны примеры расчета тяговых сил квантомобилей для наземной среды движения ТС с возможным переходом в воздушную среду. Показывается, что расчетная методика, в связи с необходимостью учета лифта, отличается от традиционных алгоритмов расчета силового баланса автомобиля.В работах
, , автором рассматривались вопросы продольной устойчивости квантомобиля. В работе обосновывались требования к энергетической цене тяги КДД, которые позволят квантомобилю превосходить современные ТС по энергоэффективности. Эти аспекты несомненно потребуют их привлечения к формированию комплексных оценок эффективности передвижения средств квантомобильного транспорта.В данном исследовании, однако, сосредоточимся на механике неизведанного траекторного аспекта движения квантомобиля – его взлете. Решение задачи траекторного исследования допускает избежания рассмотрения устойчивости объекта и энергетики процесса, но вместе с тем способно обеспечить будущую оптимизацию в поле возможных траекторий взлета (уже с привлечением показателей устойчивости и критериев энергоэффективности) каркасом опорных траекторий и фиксированными операционными точками
.Взлёт объекта становится возможным только тогда, когда суммарная подъёмная сила (СПС), представляющая собой сумму аэродинамической и трастовой подъемных сил (АПС и ТПС), превосходит вес этого объекта. В мировой авиации наработан опыт взлета и посадки летательных аппаратов (ЛА), условно разделяющий множество вариантов взлета на три категории: обычный взлет с нефорсированным разбегом (Conventional Take-Off and Landing (CTOL)), форсированный взлет с коротким разбегом (Short Take-Off and Landing (STOL)), вертикальный взлет (Vertical Take-Off and Landing (VTOL))
, . В основе взлета CTOL находится АПС крыльев и фюзеляжа (для вертолета – еще и вертикальная ТПС винта) – возникающая и растущая со скоростью разбега ЛА. Для реализации STOL к АПС, как правило, подключаются силы вспомогательных средства создания дополнительной вертикальной тяги с выполнением специального сценария разгона и отрыва от ОП. Реализация взлета VTOL до достижения режима полного висения ЛА производится почти без участия АПС – за счет ТПС одного или нескольких трастеров (если не считать граунд-эффект близости земли , , , у вертолетов и экранопланов , а также некоторое сопротивление воздуха вертикальному движению ЛА).Как видим, универсальной схемы, алгоритма взлета существующих ЛА нет. В связи с этим возникает гипотеза: С внедрением в конструкцию ТС КДД моделирование взлета экипажа станет возможным по единому алгоритму, охватывающему все способы (варианты) взлета: CTOL, STOL и VTOL.
Кроме верификации этой гипотезы предстоит также оценить динамику процессов в совокупности вариантов взлета квантомобилей. Здесь учет упругих сил и демпфирования в подвеске экипажа является, несомненно, важным. При этом, в дополнение к каноническому моделированию колебательного процесса подвески автомобиля, требует рассмотрения и моделирования не столь изученный процесс отрыва колес от ОП; втягивание подвески в корпус из-под днища с выдвижением оперения; связанное с этим изменение конфигурации экипажа и др. Сконцентрировав внимание на этом технологическом аспекте и допустив, что колебание неподрессоренных масс у квантомобиля оказывает незначительное влияние на перемещение подрессоренных масс, колебательную систему подвески представим в МПДК в самом упрощенном виде: одномассовая колебательная система под нагрузкой с одной приведенной жесткостью (упругостью) cup подвески в целом и одним общим приведенным коэффициентом демпфирования амортизаторов kam, приложенным к общей массе экипажа m , .
2. Методы и принципы исследования
2.1. Цель и задачи исследования
Целью расчетного исследования явилось формирование модели взлета квантомобиля с обеспечением возможности количественной оценки динамики сопутствующих процессов.
Отсутствие признанных теоретических основ движения квантомобиля, натурных образцов исследуемых объектов и эмпирических данных по ним, вызывает необходимость использовать подход с опорой на программное имитационное моделирование (ПИМ).
Задачами по достижению цели являются:
1) формирование математической модели движения квантомобиля под поставленную цель;
2) разработка в авторской Simulink-модели приземного движения квантомобиля (МПДК) Подсистемы взлета и вывешенного движения (ПВВД) с реализацией последовательности этапов движения: I – лифт экипажа до высоты отрыва колес от ОП Hlf1; II – лифт до высоты убирания подвески и выпуска оперения Hlf2; III – лифт до нижней высоты безопасности полета Hlf3;
3) отработка интерфейса взаимодействия с моделью, задания сценариев взлета, контроль движения экипажа, многофакторного вывода результатов;
4) проведение ПИМ на базе Simulink-модели с экспериментами, охватывающими некоторое множество вариантов взлета ТС;
5) обсуждение и обобщение результатов расчетов;
6) формирование рекомендаций и выводов.
2.2. Идейная основа модели движения квантомобиля с учетом вывешивания
Исследование влияния прикладываемых к экипажу в плоскости тангажа горизонтальных и вертикальных сил на продольную устойчивость ТС в рамках 3-DOF моделирования (3 degrees of freedom
) автором осуществлялось в работах , , . В настоящем исследовании, однако, поскольку намерены исследовать в плоскости тангажа лишь траектории взлета, с отводом вопроса обеспечения продольной устойчивости ТС, достаточно модели с двумя степенями свободы (2DOF ). Это позволяет условно совместить в исследовании центр тяжести (ЦТ), центр давления (ЦД) и точку приложения траста (ТПТ) КД в срединной плоскости базы ТС. При этом будем помнить, что при учете реальных локаций ЦТ, ЦД и ТПТ траектории взлета будут отличаться от анонсируемых настоящим исследованием (из-за дополнительных энергозатрат на поддержание устойчивости экипажа).Взлет (в плоскости тангажа) представляется двумя компонентами движения: горизонтальной и вертикальной. Горизонтальная составляющая МПДК представлена в авторских работах
, , , ; здесь, однако, для целостного восприятия взаимодействия таковой с вертикальной компонентой ее кратко представим. Вертикальную же компоненту движения при взлете изложим изначально.Баланс горизонтальных сил, действующих на квантомобиль
, :где Fr – сила сопротивления качению опорных колес, Н;
Fwx – сила сопротивления воздуха продольному движению, Н;
Fax – продольная сила инерции экипажа, Н;
Gq' – сила давления экипажа на ОП с учетом частичного лифта, Н;
fk0 – коэффициент сопротивления качению колес при нулевой скорости;
fkv – скоростной коэффициент сопротивления качению колес, с2/м2;
Vq – скорость продольного движения квантомобиля, м/с;
cd – коэффициент продольного аэродинамического сопротивления;
ρw – плотность воздуха, Н ×с2/м4;
Sfr – фронтальная (лобовая) площадь экипажа, м2;
Gq – сила тяжести квантомобиля, Н;
g – ускорение свободного падения, м/с2;
ax – продольное ускорение экипажа, м/с2;
δwh – коэффициент инерции вращения опорных колес экипажа.
Сила Gq' = Gq – (FTz+Fwz) = Gq – FzSum, где FzSum – суть СПС. Для квантомобиля приведенная масса m’ = Gq(1+δwh)/g учитывает вращение только опорных колес (привод отсутствует).
Сформируем баланс вертикальных сил, действующих на квантомобиль.
Система вертикальных перемещений экипажа на этапе I с опорой на колеса в упрощенном виде (конфигурация 1): одномассовая система с одной степенью свободы, с учетом вертикальных сил сопротивления подвески, при этом с приведенными коэффициентами жесткости (упругости) подвески и демпфирования, без учета воздействия профиля ОП (ровное полотно, характеризуемое двумя коэффициентами: fk0 и fkv). Динамическая модель ТС охватывает также этап II движения вывешенного над ОП экипажа с висящей подвеской (все еще конфигурация 1), за ним этап III – с убранной подвеской и выдвинутым оперением (конфигурация 2).
Для исходного положения статического равновесия, когда СПС FzSum= 0 и на экипаж снизу действует лишь сила упругости Fup= Gq =m*g, примем z = 0.
При наличии силы 0 < FzSum < Gq (опять же для статики, но при промежуточном положении подвески z > 0) можно записать:
Gq = FzSum+Fup, т.е. сила упругости убывает на величину возникающей СПС FzSum.
При z = Gq /cup=Hlf1 (в момент, когда подвеска высвобождается и колеса отрываются от ОП) сила FzSum полностью замещает силу упругости Fup (в противодействии все той же силе тяжести Gq = const).
В динамике добавляются силы, зависящие от вертикальной скорости квантомобиля vz: сила сопротивления амортизаторов Fam = f(vz) и сила сопротивления воздуха вертикальному перемещению экипажа Fvpl = f(vz2); а также – инерционная сила, зависящая от вертикального ускорения az: Faz = f(az). Баланс сил теперь выглядит так:
С учетом того, что Fup(z) = Gq – z*cup, можно записать:
Обозначив z*cup = Fpz и заметив, что это – высвободившаяся часть силы упругости, перешедшая в потенциал лифта, можем записать для силы, остающейся на ускорение экипажа:
где Fvz = Fvpl(vz2) + Fам(vz) – совокупность сил, связанных со скоростью вертикального движения экипажа.
В форме ДУ это:
где: kam – приведенный коэффициент демпфирования амортизаторов подвески, Н*с/м;
kwv = cdv *(ρw/2)*Spl – фактор вертикальной обтекаемости экипажа, Нс2м-2;
cdv – аэродинамический коэффициент сопротивления вертикальному перемещению экипажа;
Spl – площадь в плане экипажа, м2.
При наличии двух (или более) конфигураций экипажа величѝны cdv и Spl будем индексировать, например, для исходной конфигурации 1 (для высот 0 ≤ z ≤ Hlf2) – cdv1 и Spl1, а для лётной конфигурации с высотой z > Hlf2 – cdv2 и Spl2.
В момент перехода с этапа I к этапу II сила Fpz = Gq – сила тяжести так и присутствует далее на взлете и в полете. Однако для амортизатора картина иная: происходит ступенчатый сброс силы сопротивления с некоего уровня до нуля. Пробные расчеты в МПДК показали возможность ударных импульсов при ступенчатом сбросе (физически при отсутствии специальных устройств) до нескольких десятков g.
Для устранения этого в МПДК внедрен Модуль формирования снижения сопротивления амортизатора вблизи конечной точки хода штока – посредством реализации Экспоненциального сигмоида
:При достижении значения pz = Gq/cup рессоры переходят в свободное состояние (вывешиваются, с отрывом колес от ОП). Поддерживающая сила Fpz = Gq. Этап I (с достижением высоты Hlf1) заканчивается.
Начинается этап II – подъем экипажа с висящей подвеской до высоты Hlf2 (например до 10 м). Здесь kam = 0, cup = 0, cdv = cdv1, Spl = Spl1.
На высоте Hlf2 начинается этап III. В его начале подвеска вбирается в корпус экипажа, одновременно выдвигается оперение: cdv = cdv2, Spl = Spl2. Подъем продолжается до высоты Hlf3 (например, до 25 м). Взлет заканчивается с фиксацией результатов.
Симуляция взлета и продолжения полета может быть продолжена при задействовании переключателя режима работы программы.
2.3. Программное обеспечение модели МПДК
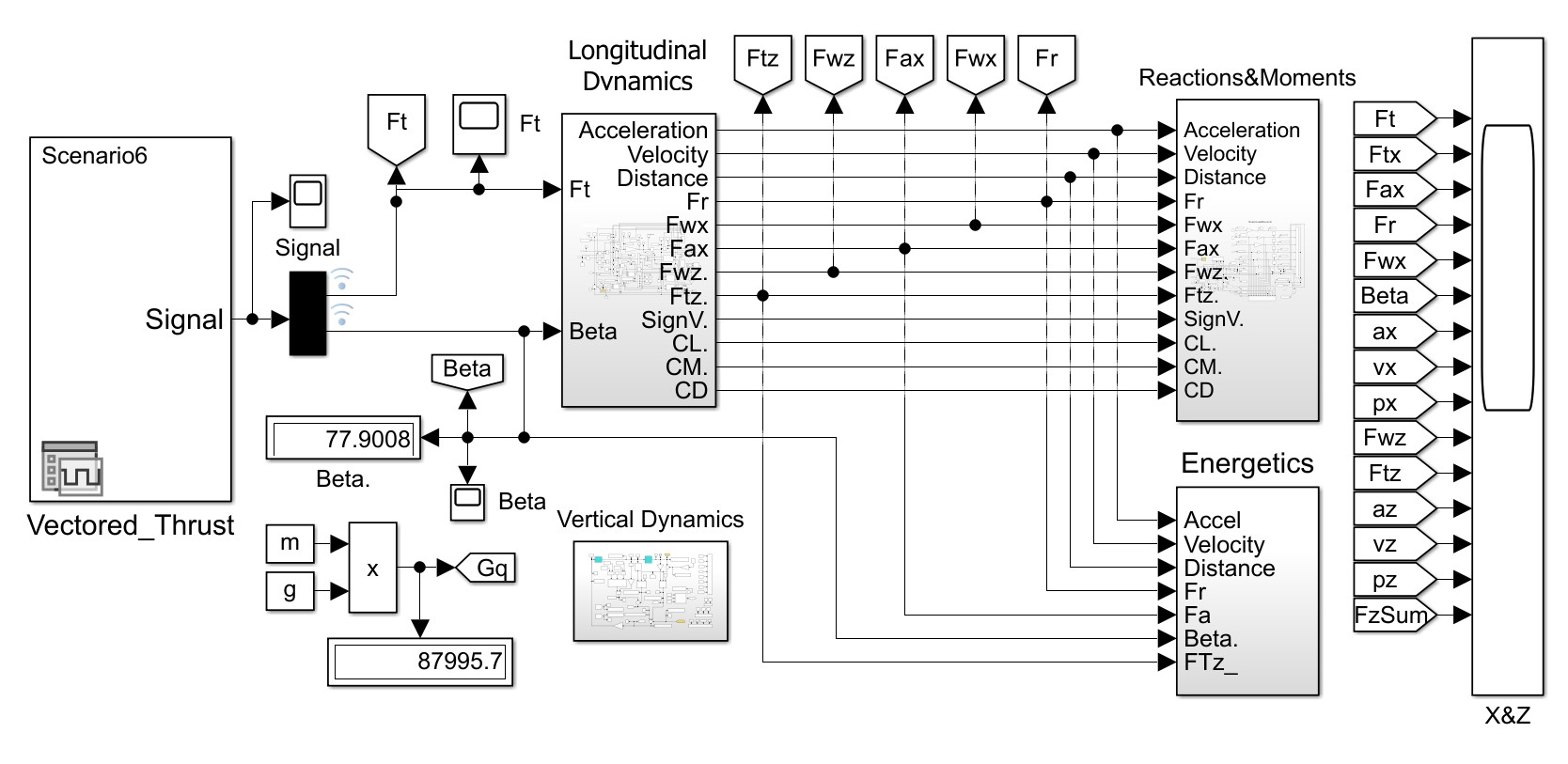
Рисунок 1 - Главный модуль S-модели МПДК
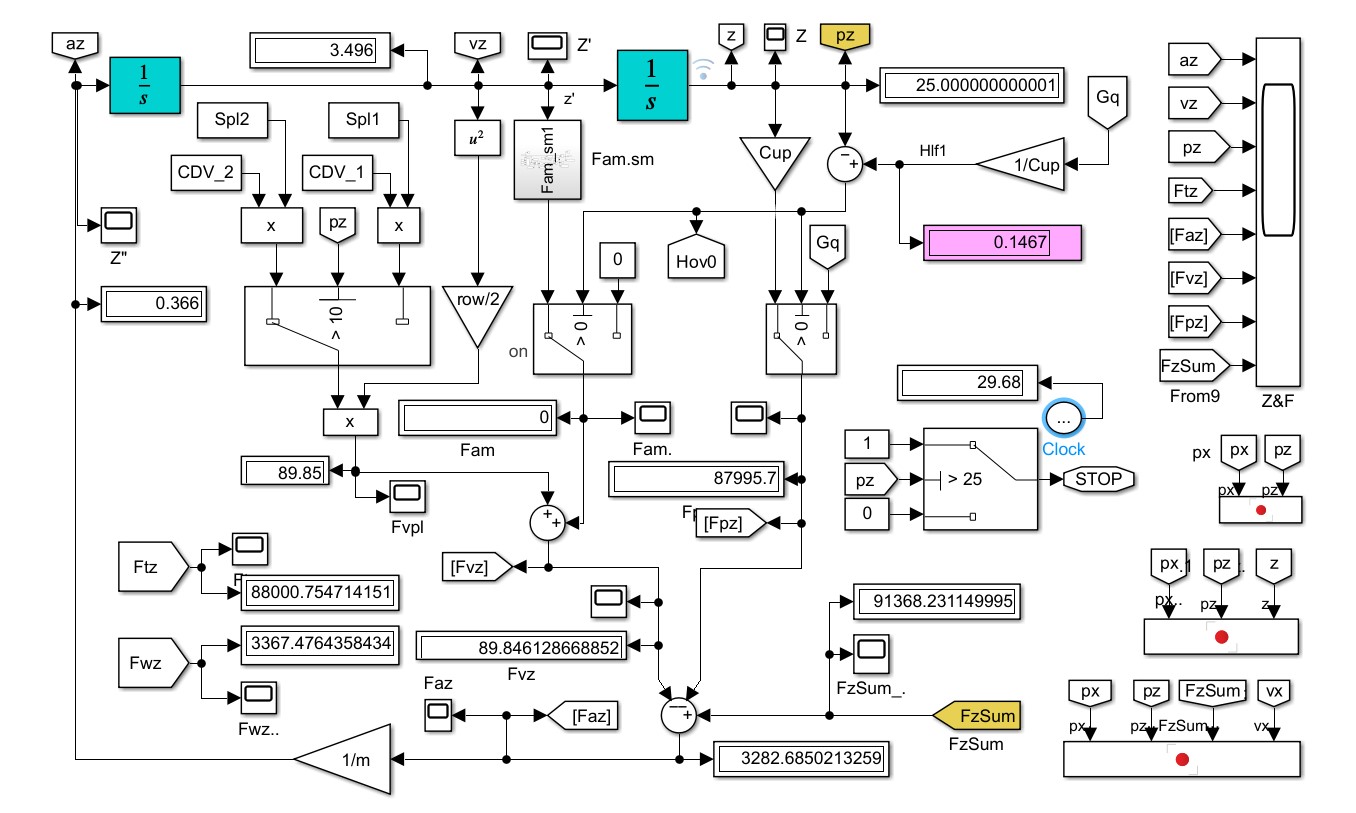
Рисунок 2 - Модуль вертикальной динамики квантомобиля Vertical Dynamics
Вверху на схеме рис. 2 действуют два интегратора (1/s), формирующие вертикальные скорость vz и позицию pz экипажа. Подсистема содержит блок остановки по достижении заказанного положения pz с фиксацией модельного времени (блок Clock). На рис. 2 виден замаскированный блок Fam.sm формирования сигмоидального сглаживания по формуле (9).
Имеется множество дисплеев и осциллографов для отслеживания значений показателей на временнóй шкале. Имеется также три блока Record (см. юго-восточный угол схемы) – для отображения показателей в зависимости от пространственного положения экипажа.
3. Результаты расчета показателей движения квантомобиля
3.1. Подготовка моделей квантомобилей
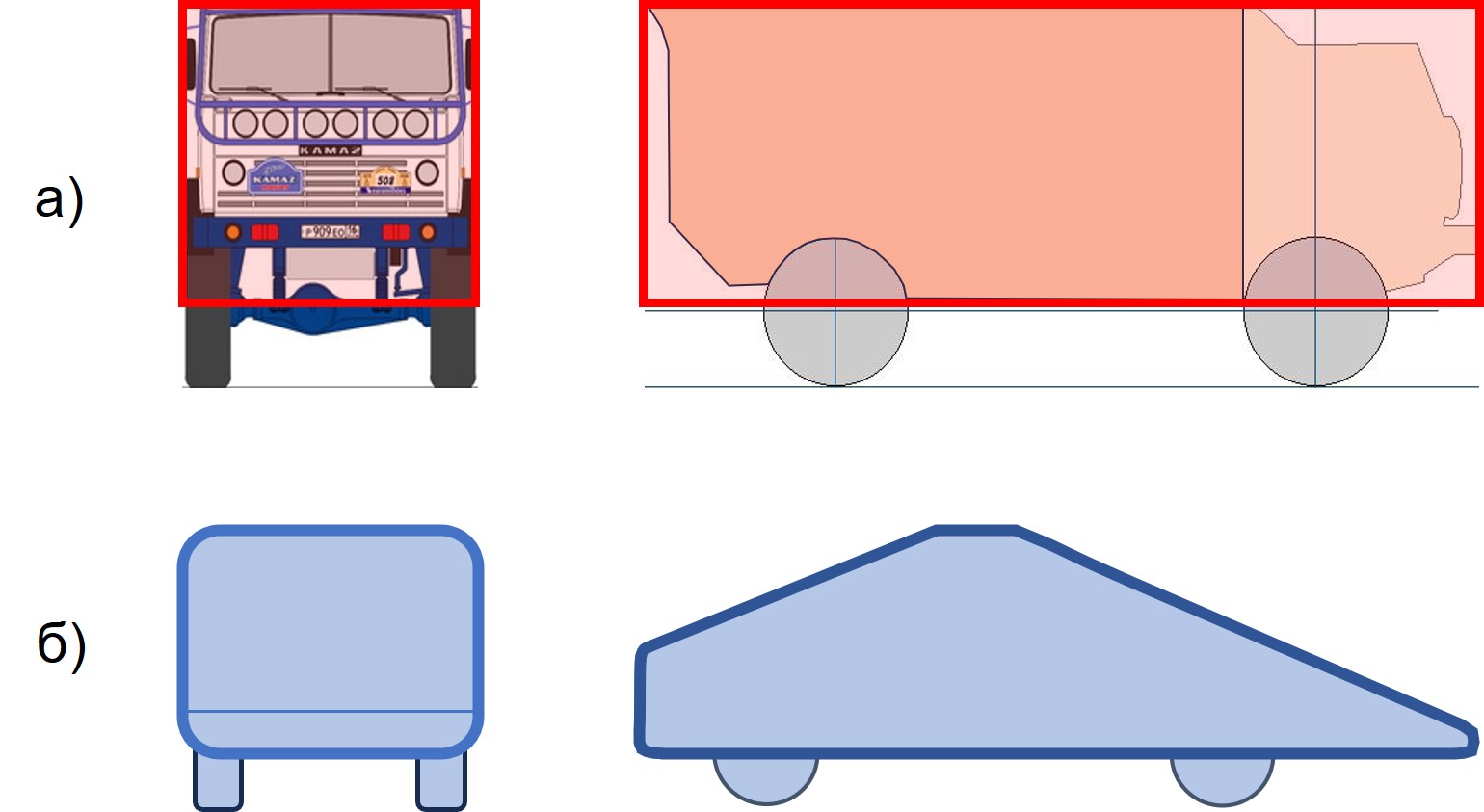
Рисунок 3 - Профили моделей ПОТ:
а - 1-Box; б - Davis
Таблица 1 - Основные данные по моделям 1-Box и Davis
Параметр | 1 | 2 |
1-Box | Davis | |
L, м | 7,3 | 7,3 |
W, м | 2,55 | 2,55 |
H, м | 3,3 | 1,87 |
Sfr1, м2 | 8,5 | 4,76 |
Sfr2, м2 | 7,5 | 5,5 |
Lwb, м | 4,25 | 4,87 |
L2, м | 2,125 | 2,435 |
Hg, м | 1,3 | 0,9 |
Hw, м | 1,46 | 1,0 |
rd, м | 0,5 | 0,5 |
m, кг | 8970 | 8970 |
Gq, Н | 87995,7 | 87995,7 |
FT, Н | 90000 | 90000 |
cd1 | 0,32 | 0,263 |
cd2 | 0,3 | 0,25 |
cl1 | 0 | 0,42 |
cl2 | 0,1 | 0,35 |
cm1 | 0 | –0,35 |
cm2 | 0,1 | –0,2 |
cdv1 | 0,8 | 0,6 |
cdv2 | 0,7 | 0,5 |
Spl1, м2 | 18 | 15 |
Spl2, м2 | 24 | 24 |
fk0 | 0,3 | 0,02 |
fkv, с2/м2 | 0,00037 | 0,00037 |
ЦТ обеих моделей расположили в их срединных плоскостях колесной базы (L2=Lwb/2, где Lwb – колесная база, а L2 – расстояние от ЦТ до вертикальной плоскости задней оси). Точку приложения траста расположили в ЦТ.
В целях возможности продольного движения экипажа весом 88 кН при его полном вывешивании выбрали траст FT = 90 кН (обосновано в
, ). Во всех расчетных реализациях взлета рост траста с нуля до 90 кН происходит за 5 секунд.3.2. Вертикальный лифт
Сначала рассмотрели только лифт до высоты Hlf3 = 25 м с приложением к ПОТ вертикально направленного траста, без горизонтального движения экипажа (FT = 90 кН, β=90°).
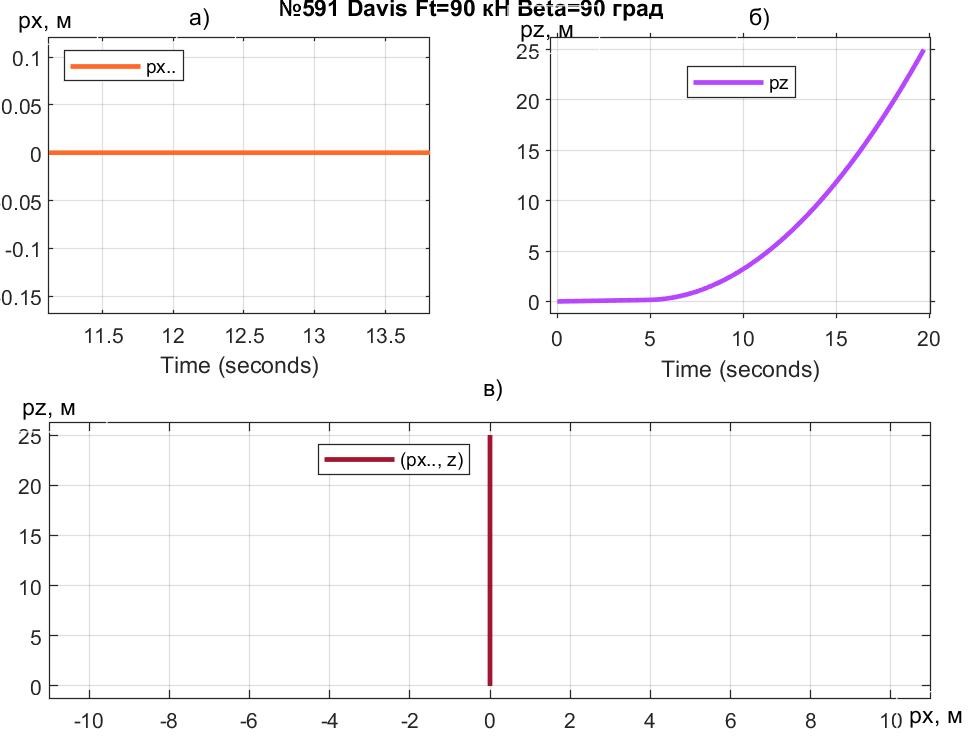
Рисунок 4 - Перемещение модели Davis под воздействием траста FT = 90 кН и β = 90°
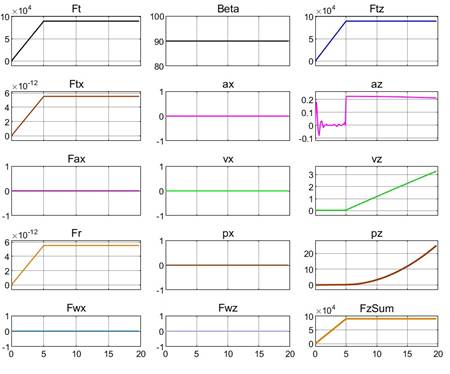
Рисунок 5 - Совокупность показателей процесса вертикального лифта ПОТ 1-Box до высоты Hlf3=25 м
Примечание: FT = 90 кН, β = 90°
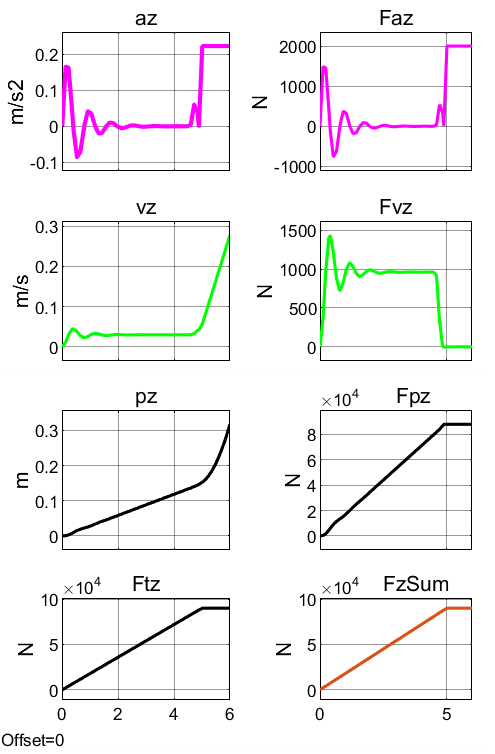
Рисунок 6 - Процессы изменения показателей вертикального движения квантомобилей в первые 6 секунд лифта
Примечание: и 1-Box, и Davis
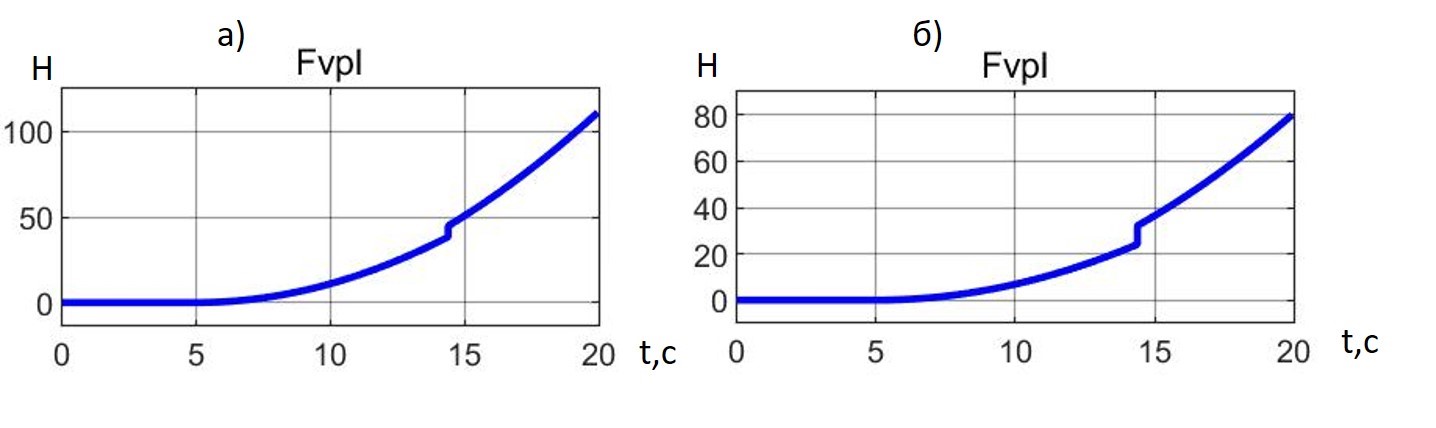
Рисунок 7 - Сила аэродинамического сопротивления вертикальному движению экипажа Fvpl:
а - 1-Box; б - Davis
Траст FT = 90 кН, в отсутствие АПС, может обеспечить вывешивание экипажа весом Gq = 88 кН с отрывом колес от ОП в пределах изменения угла β = 90 ÷ 77,9°, когда FTz ≥ Gq.
Далее для обеих машин рассмотрели их движение при угле наклона траста β = 77,9°. При угле β = 77,9° FTx = 18,87 кН. Тяговая сила FTx, идущая в этом случае только на преодоление сопротивления воздуха и сил инерции, позволяет разогнать экипаж в вывешенном состоянии до существенной скорости
.Вместе с тем при начальном росте величины FT (и одновременно FTx) приходится преодолевать меняющуюся силу сопротивления качению колес Fr, да еще с учетом сопротивления страгивания колес (см.
).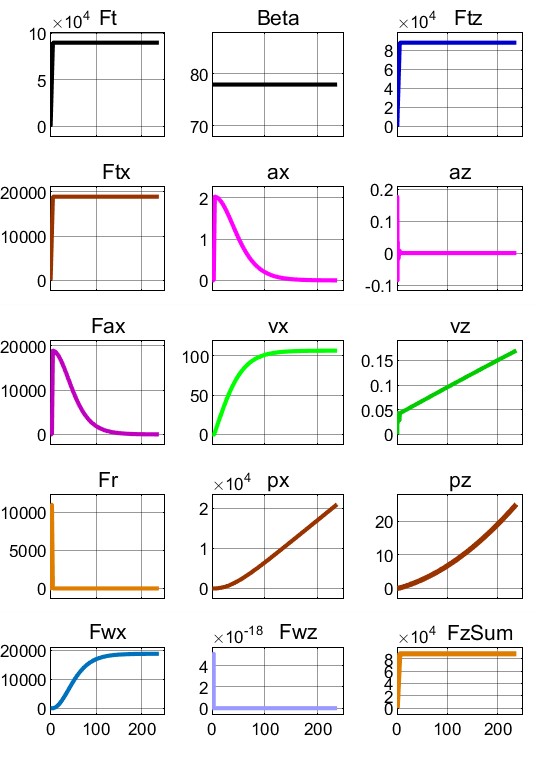
Рисунок 8 - Показатели лифта 1-Box до pz = 25 при β = 77,9° во времени t
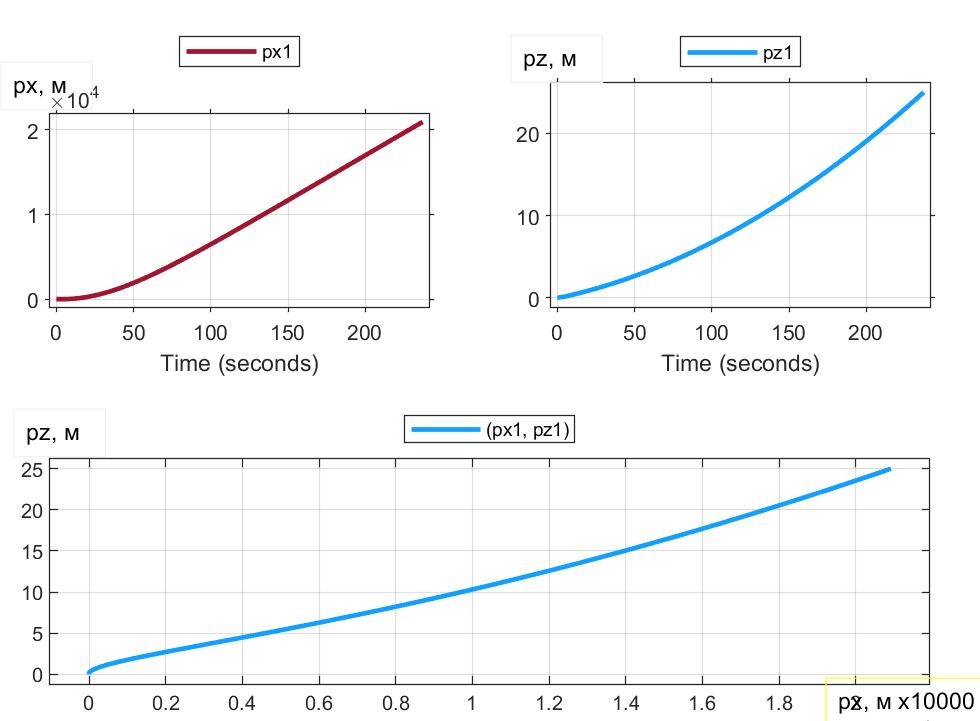
Рисунок 9 - Перемещение ПОТ 1-Box под воздействием траста FT = 90 кН и β = 77,9°
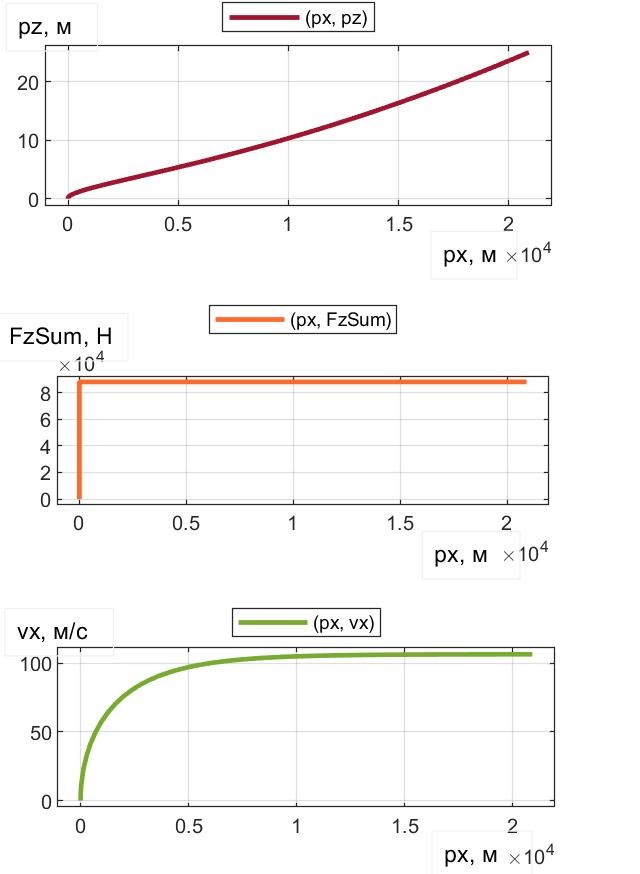
Рисунок 10 - Зависимость лифта, СПС и продольной скорости ПОТ 1-Box от пути при FT = 90 кН и β = 77,9°
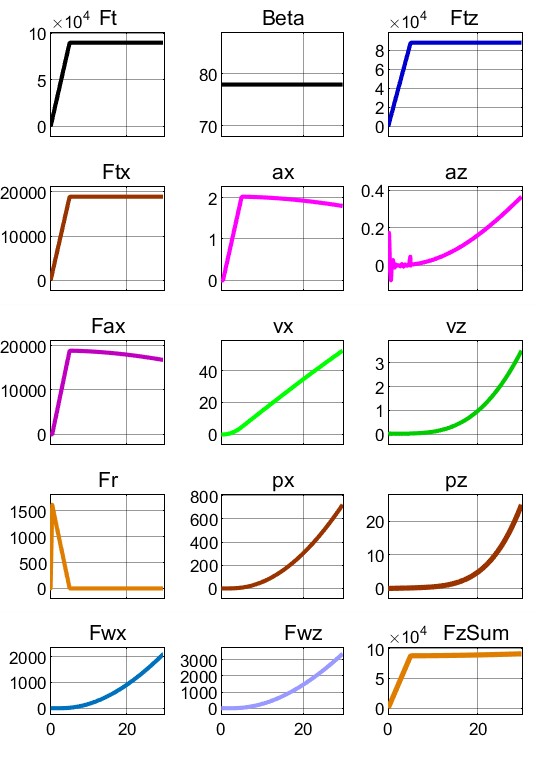
Рисунок 11 - Показатели лифта ПОТ Davis до pz = 25 м при β = 77,9° во времени t
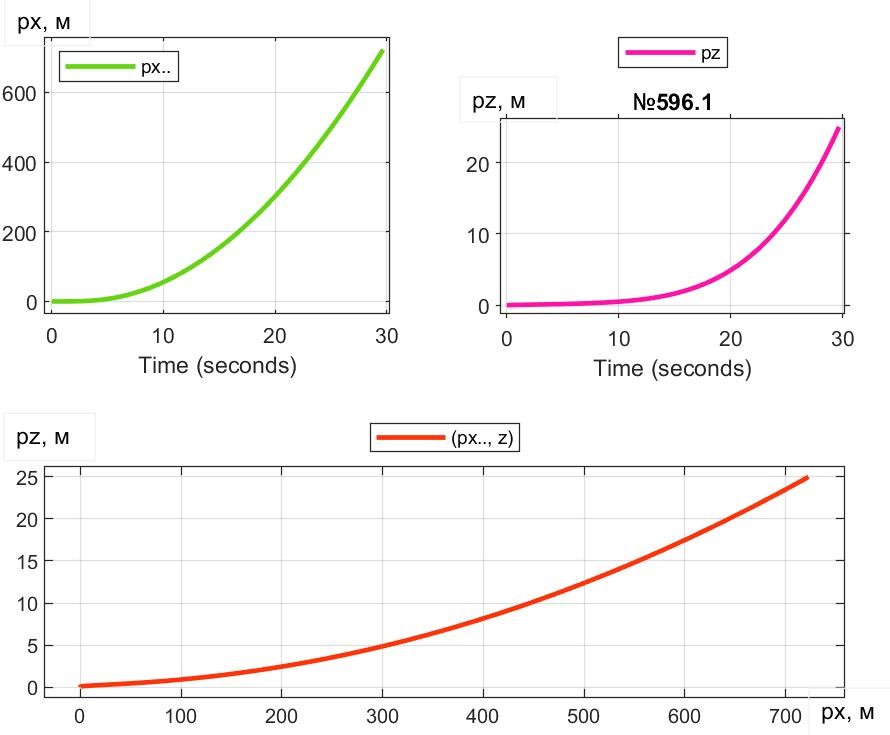
Рисунок 12 - Перемещение ПОТ Davis под воздействием траста FT = 90 кН и β = 77,9°
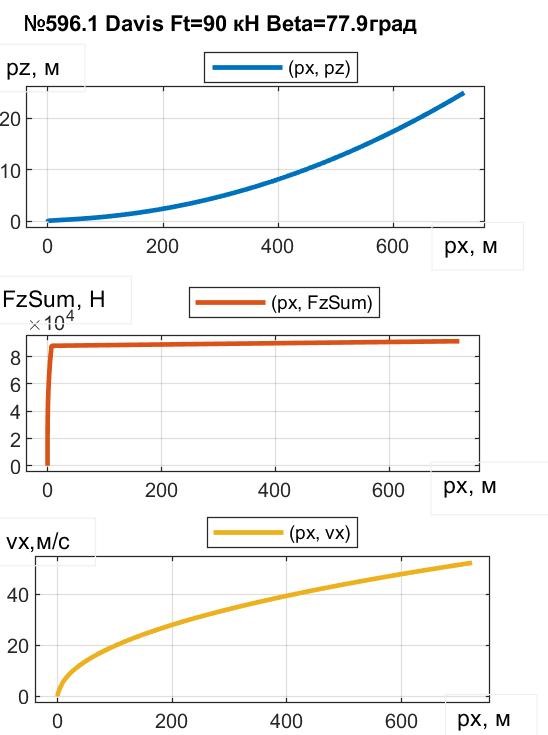
Рисунок 13 - Зависимость лифта, СПС и продольной скорости ПОТ Davis от пути при FT = 90 кН и β = 77,9°
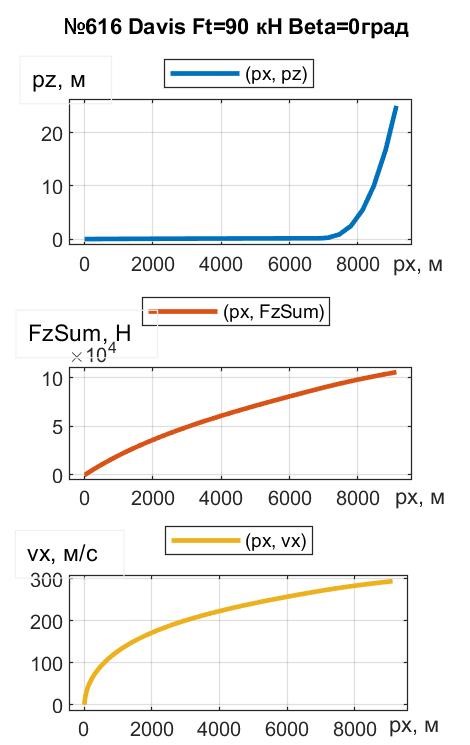
Рисунок 14 - Зависимость лифта, СПС и продольной скорости ПОТ Davis от пути при FT = 90 кН и β = 0°
В МПДК один из вариантов подсистемы формирования заданий Vectored_Thrust (см. рис. 1) позволяет реализовать с одного запуска множество заданий расчета с перебираемыми значениями исходных параметров, с получением обобщающего графика.
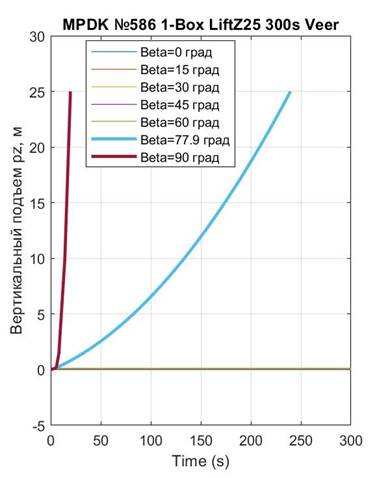
Рисунок 15 - Реализация лифта во времени до высоты Hlf3 = 25 м у ПОТ 1-Box
Примечание: вариации β = 0°, 15°, 30°, 45°, 60° графически неотличимы
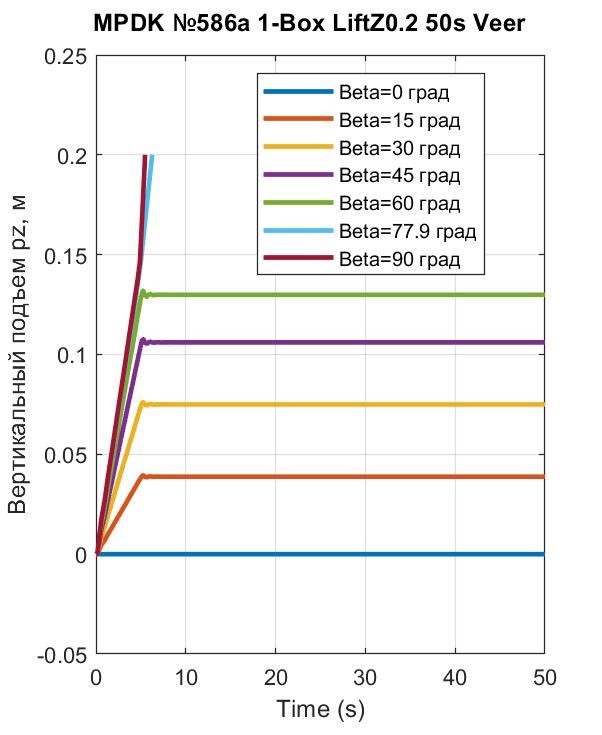
Рисунок 16 - Начальные эпизоды развития лифта во времени до высоты pz = 0,2 м у ПОТ 1-Box
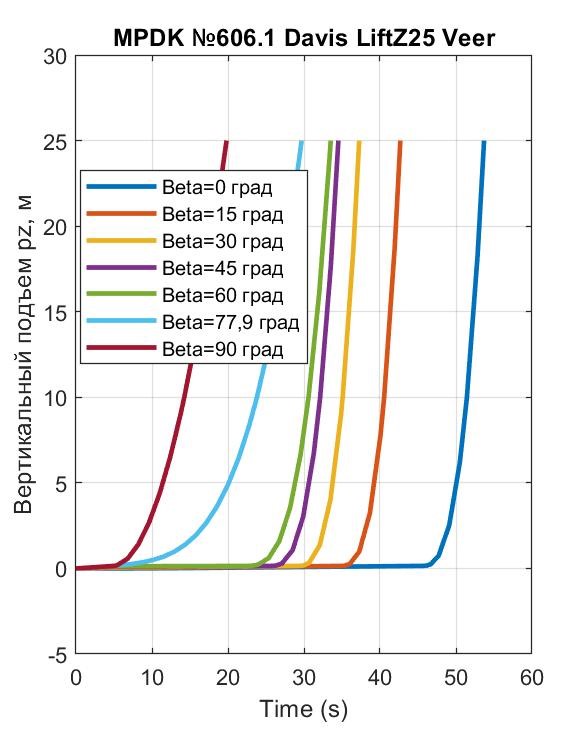
Рисунок 17 - Реализация лифта во времени до высоты Hlf3 = 25 м у Davis
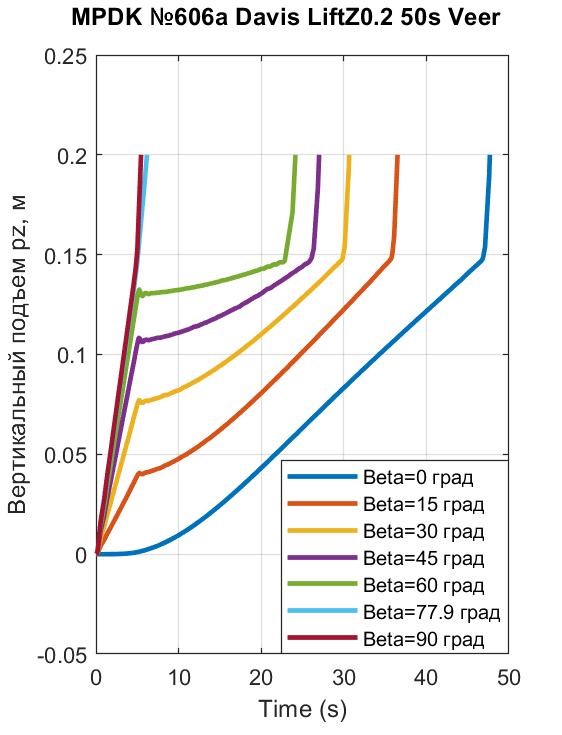
Рисунок 18 - Начальные эпизоды развития лифта во времени до высоты pz = 0,2 м у Davis
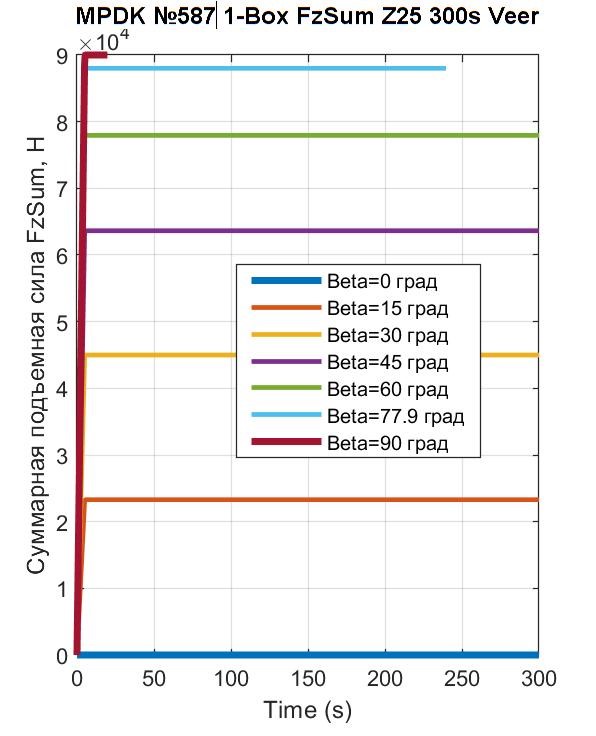
Рисунок 19 - СПС FzSum, генерирующая лифт 1-Box при различных наклонах траста
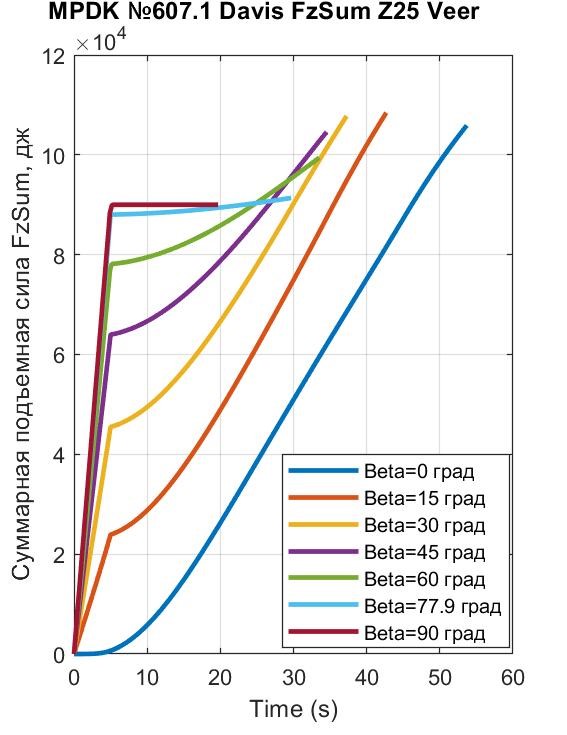
Рисунок 20 - СПС FzSum, генерирующая лифт Davis при различных наклонах траста β
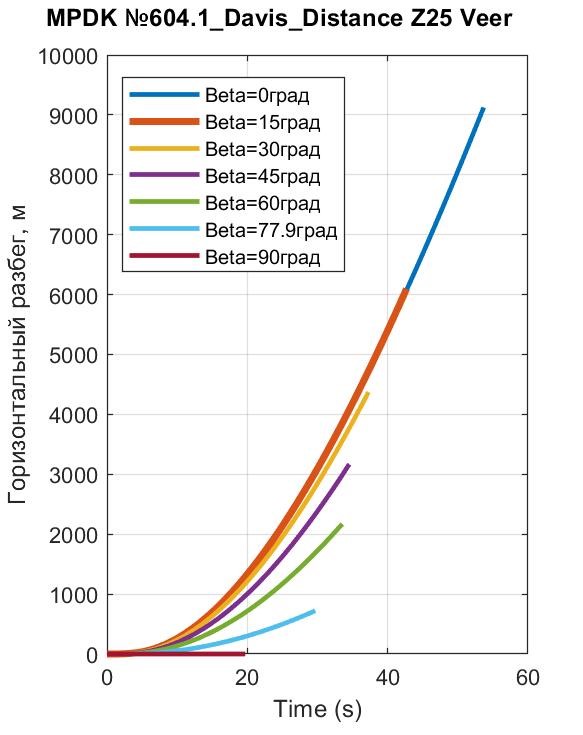
Рисунок 21 - Горизонтальные разбеги Davis до лифта pz = 25 м при различных углах наклона траста β
4. Обсуждение
4. Обсуждение результатов расчетов
Совокупность представленных расчетов нацелена, во-первых, на демонстрацию возможностей МПДК в части представления особенностей взлета квантомобиля, а во-вторых, – на построение каркаса опорных вариантов для последующей гибкой оптимизации взлетных стратегий в этой структуре.
Графики вида рис. 4, 9 и 12, давая плоскостное представление об изменении координат модели движения объекта, по сути являются проекциями траектории F(t,px,pz) на плоскости t-0-px, t-0-pz и px-0-pz и представляют возможную базу для перехода к анализу траекторий в трехмерном пространстве.
С количественной точки зрения выяснили, например, (см. рис. 9 и 12), что при β = 77,9° ПОТ 1-Box достигает высоты Hlf3=25 м на пути px = 20920 м за 237 с, тогда как Davis достигает Hlf3, пробегая путь px = 723 м за 29,7 с. Уяснить причины можно с помощью рис. 8 и 11. Видим, что сила сопротивления воздуха Fwx у 1-Box достигает 19000 Н, тогда как у Davis – лишь 2100 Н, что дает возможность в балансе горизонтальных сил Davis реализации намного превосходящей силы Fax (и соответственно – ускорения ax). В балансе вертикальных сил, наличие у Davis АПС Fwz (до 3500 Н) увеличивает на эту величину СПС FzSum, что приводит к повышенным az и vz, и как следствие, – к более быстрому достижению высоты Hlf3 = 25 м.
Полезно проследить по рис. 6 динамику движения экипажа в первые 6 секунд взлета. Видим, что при z = Hlf1 = 0,1467 м (Gq/cup = 88000Н / 600000Н/м = 0,1467 – см. на рис. 2 сиреневый блок), экипаж, под действием FTz, выросшего до 90 кН, и освободившись от силы сопротивления амортизаторов Fam, устремляется вверх с растущей скоростью vz. Также видим, что колебания от первичного силового импульса затухли за 3 периода, что свидетельствует об удовлетворительном сочетании характеристик упругих элементов и амортизаторов.
Упомянутое незначительное отличие процессов лифта двух экипажей проявляется только из-за разницы параметров аэродинамики вертикального движения: cdv и Spl. По рис. 7 видим, что разница – незначительная: по причине малых скоростей vz (не более 3,3 м/с по графику рис. 5). Но при этом, всё-таки, можно отметить более низкий уровень сопротивления Fvpl у более совершенного профиля Davis.
Ответ о развиваемых скоростях при взлете до высоты 25 м по времени vx(t) и vz(t) можно получить по графикам вида рис. 8 и 11, а по пути vx(x) и vz(x) – вида рис. 10 и 13. Числовые показатели взлета, соответствующие этим графикам, снесены в табл. 2.
Таблица 2 - Показатели взлета ПОТ при β = 77,9°
ПОТ | t, с | px, м | vx, м/с | pz, м | vz, м/с |
Davis | 29,7 | 723 | 52 | 25 | 3,5 |
1-Box | 237 | 20920 | 106,4 | 25 | 0,17 |
1-Box | 29,7 | 684 | 49,5 | 1,4 | 0,056 |
Анализируя показатели двух верхних строк, можно, например, отметить, что целевое событие достижения высоты лифта Hlf3 = 25 м происходит при t = 29,7 c и 237 c, но при px = 723 м и 20920 м, при этом максимальные скорости: 52 м/с и 106,4 м/с (для 1-Box и Davis, соответственно). В последней строке помещены показатели 1-Box, полученные для целевого события t = 29,7 c. Видим, что за время, когда Davis поднимается на 25 м, 1-Box – всего на 1,4 м. Ни px = 20920 м, ни pz = 1,4 м – явно неприемлемы: и это требует для улучшения показателей привлечения комбинирования величиной и углами траста c использованием оптимизационных методов.
Анализ графиков на рис. 15 показывает, что взлет ПОТ 1-Box до высот Hlf2 и Hlf3 при FT = 90кН и углах β < 77,9° невозможен. Высóты, до которых приподнимается ПОТ 1-Box под воздействием названого траста и углов β < 77,9°, отражены на рис. 16 – все они в пределах Hlf1 = 0÷0,1467 м работы подвески.
Картина существенно меняется при генерации АПС у Davis. Временные графики взлета этого ПОТ до высоты Hlf3 = 25 м приведены на рис. 17. Детализация характера перемещений в пределах работы подвески отражена на рис. 18. Сравнивая графики рис. 16 и рис. 18, видим, что в первые 5 секунд лифт обоих экипажей практически одинаков (подвески одинаковы, ТПС – одинаковы, АПС у Davis при малой скорости vx ничтожна). Далее (привлекая рис. 15 и рис. 17) выявляем существенную разницу в реализации вывешивания экипажей, обусловленную разницей сопротивления ОП и воздуха.
Анализ расчетных материалов по всем углам наклона траста β при взлете ПОТ Davis позволил сформировать сводную таблицу 3.
Таблица 3 - Сводная таблица показателей расчетов по взлету ПОТ Davis до высоты 25 м со сменой угла наклона траста β
№ пп | β, град | t, c | px, м | vx, м/c | vz, м/c | FTz, кН | Fwz, кН | FzSum, кН |
1 | 0 | 53,7 | 9126 | 294 | 8,65 | 0 | 106 | 106 |
2 | 15 | 42,7 | 6095 | 264 | 9,21 | 23 | 85 | 108 |
3 | 30 | 37,3 | 4375 | 226 | 9,03 | 45 | 63 | 108 |
4 | 45 | 34.5 | 3169 | 183 | 8,23 | 64 | 41 | 105 |
5 | 60 | 33,5 | 2171 | 132 | 6,79 | 78 | 21 | 99 |
6 | 77,9 | 29,7 | 723 | 52 | 3,50 | 88 | 3 | 91 |
7 | 90 | 19,9 | 0 | 0 | 3,3 | 90 | 0 | 90 |
8 | 90→64,75 | 29,7 | 195 | 36 | -3, 1 | 81 | 2 | 83 |
Анализ данных строк 1…7 табл. 3 позволяет отметить следующее. Минимальным временем подъема до высоты 25 м (19,9 с) отличается вертикальный лифт (β = 90°). Длительность лифта при наклоне траста β = 77,9° – больше на 50% (29,7 с).
Наибольшей длительностью, естественно, характеризуется лифт при горизонтальном трасте (β = 0°, t = 53,7 с) – здесь при ТПС FTz = 0 проявляется задержка с накоплением достаточной для вывешивания АПС. Отметим, что, во-первых, разбег взлета px = 9126 м – практически неприемлем, а во-вторых, результаты строк с 5-той по 1-ю – малоубедительны, поскольку принятые значения коэффициентов cd и cl для ПОТ Davis действенны до скоростей vx ≈ 50 м/с
, . Показатели строк 1…5 носят сослагательный характер, свидетельствующий о возможности расчетов при наличии достоверной информации о высоких скоростях.Взяв за основу лифт с «однонаклонным» трастом β = 77,9°, имеет смысл сравнить его с комбинацией углов наклона β в процессе вывешивания экипажа. Примером может быть траектория лифта с углом β = 90° до t =19,9 с (см. вариант 7 табл. 3), затем движение до t = 29,7 c (в соответствии с длительностью варианта 6 табл. 3 и подобранным β = 64,75°). То есть при равенстве продолжительности движения (29,7 с) – оценить разбеги экипажа. Результаты помещены в строке 8 табл. 3. Они вынесены также на рис. 22 – для сравнения с рис. 4 и рис 12. Видим, что «комбинированный» вариант (px = 195 м) намного уступает «однонаклонному» варианту (px = 723 м), во всяком случае, для данного примера.
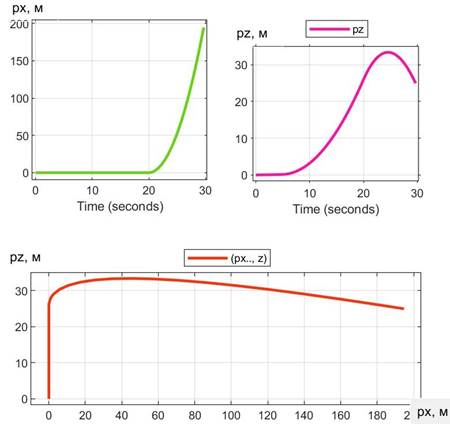
Рисунок 22 - Перемещение ПОТ Davis под воздействием траста FT = 90кН и β = 90° →64,75°
Примечание: строка 8 в табл. 3
Для ПОТ Davis (см. рис. 17 и 18) взлет возможен любым способом (VTOL, STOL, либо CTOL), поскольку достаточная для вывешивания АПС возникает при какой-либо скорости vx. Например, даже при β = 0° (FTz = 0), благодаря тому, что СПС FzSum при t ≈ 47 c достигает значения Gq = 88кН (экипаж при pz = Hlf1 отрывается от ОП – см. рис. 18 и 20), а при t ≈ 53,7 c экипаж достигает назначенной высоты Hlf3 = 25 м (см. рис. 17), – условный взлет реализуется.
Можно утверждать, что при любой достоверности данных табл. 3 важным является то, что поле способов CTOL, STOL и VTOL охватывается системой МПДК непрерывным образом, что подтверждается топологией семейств кривых на рис. 17 и 21. Рассмотренную же совокупность реализаций ПИМ можно рассматривать как некий каркас опорных траекторий взлета, в пределах которого находятся оптимальные.
5. Заключение
Разработанная в среде авторской Simulink-модели приземного движения квантомобиля (МПДК) подсистема взлета и вывешенного движения (ПВВД) Vertical Dynamics позволяет проводить расчетное исследование движения ТС в плоскости тангажа. Эта модель, по мнению автора, должна стать, во-первых, базой для оптимизационных расчетов взлета квантомобиля во многообразии его конфигураций и условий движения по ОП и рельефу местности, а во-вторых, – составной частью алгоритмов расчета динамических и траекторных показателей произвольного движения квантомобиля.
На базе проведенных посредством МПДК с ПВДД расчетов и их анализа преодолена познавательная сложность формирования траекторий движения квантомобиля на стадии его взлета во взаимосвязи трастовой и аэродинамической подъемных сил (ТПС и АПС).
Представленное исследование позволило утвердиться в гипотезе: С внедрением в конструкцию ТС КДД моделирование взлета экипажа станет возможным по единому алгоритму, охватывающему непрерывным образом все способы (варианты) взлета: CTOL, STOL и VTOL. Объединяющим фактором синтеза способов взлета является наличие у квантомобиля ТПС.
Дальнейшие исследования должны быть направлены на рассмотрение возможности применения развиваемого подхода к оптимизации траекторий движения квантомобилей, возможно, главным образом, беспилотных. Для этого понадобится, в первую очередь, привлечение комбинирования величинами и углами траста c использованием оптимизационных методов.