КОНТРОЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ С ПОМОЩЬЮ ЛАЗЕРНЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ

Сазонникова Н.А.1, Нонин А.С.2, Ткаченко А.С.3, Вобликов Д.Н.4
1Кандидат технических наук, доцент, 2,3,4 Аспирант, Самарский государственный аэрокосмический университет имени академика С.П. Королева (Национальный исследовательский университет)
КОНТРОЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ С ПОМОЩЬЮ ЛАЗЕРНЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
Аннотация
С целью совершенствования контроля положений деталей при сборке и эксплуатации разработана лазерная измерительная система контроля углового положения элементов конструкции. Реализована малогабаритная углоизмерительная система с высокой точностью измерения (погрешность ≤2ʺ) при дистанции между объектом контроля и автоколлиматором до 20 м и диапазоне измерения (10…12ʹ). Задача решена методом "прямой угловой засечки". В результате анализа выявлена погрешность измерения координат центра изображения на ПЗС-матрице измерительного прибора.
Ключевые слова: лазерные измерительные системы, угловое положение, элементы конструкции.
Sazonnikova N.A.1, Nonin A.S.2, Tkachenko A.S.3, Voblikov D.N.4
1PhD in Engineering, associate professor, 2,3,4 Postgraduate student, Samara State Aerospace University
CONTROL OF ANGULAR POSITIONS OF STRUCTURAL ELEMENTS WITH A LASER MEASURING SYSTEMS
Abstract
To improve the monitoring of provisions of parts during assembly and subsequent operation the laser measuring system is designed to control the angular position of the structure. The small-sized measuring rotary system providing high accuracy (error ≤ 2ʺ) when significant working distance between the test object and the autocollimator up to 20 m and a relatively wide measurement range (10...12ʹ) is realized. The method of "straight angled serifs" was constructed to solve this problem. As a result of the analysis the measuring error of co-ordinates of center of the image on an instrument CCD matrix is revealed.
Keywords: laser measuring systems, the angular position, structural elements
Метрологическое обеспечение многих измерительных задач производственной и научной деятельности при создании элементов конструкций летательных аппаратов и двигателей предусматривает измерение пространственного положения объектов контроля относительно единой жёсткой базы в процессе их перемещения. Совершенствование технологий изготовления и современных средств производства летательных аппаратов и двигателей требует точного контроля положений деталей при сборке, заключительных операциях и последующей эксплуатации [1-5].
Методику измерения пространственного положения элементов конструкции рассмотрим на примере системы измерения деформаций элементов посадочных мест под чувствительные элементы системы управления движением летального аппарата (ЧЭ СУД) (рис. 1).
Вес и температура, действующие на элементы конструкции, вызывают деформацию зеркал, изменение позиции и линейный сдвиг каждой из плоскостей зеркал относительного заданного положения. Для компенсации этих воздействий необходимо реализовать систему для измерения отклонения посадочных поверхностей от установленного номинала [5].
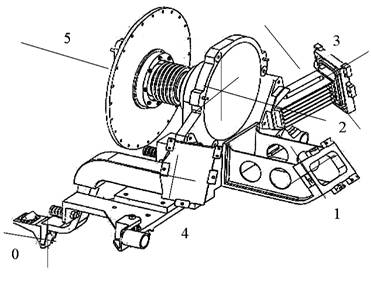
Рисунок 1 – Общий вид конструкции платформы с посадочными местами под ЧЭ СУД: 0 – узел подвески; 1,3,4– места установки зеркал; 2, 5 –вращающиеся плоские зеркала.
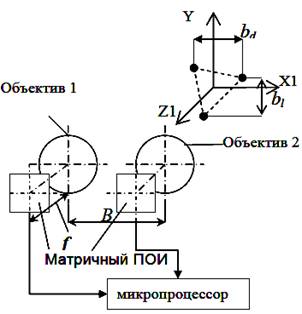
Рисунок 2 – Обобщённая структурная схема оптико-электронной системы, работающей по методу триангуляции
Для контроля углового положения крупногабаритных конструкций эффективны оптико-электронные измерительные системы. Применительно к поставленной задаче необходима реализация малогабаритной углоизмерительной системы, обеспечивающей высокую точность измерения (погрешность не более 1,5…2ʹʹ) при значительной рабочей дистанции между объектом контроля и автоколлиматором (до 20 м) и относительно широком диапазоне измерения (10…12ʹ).
Чувствительность измерения в ОЭС контроля углового положения элементов конструкции обоих видов по дальности и угловым координатам прямо пропорциональна произведению базового расстояния между контрольными точками объекта (для ОЭС, работающей по методу «угловой засечки» – между центрами апертур объективов двух приемных каналов) на фокусное расстояние объектива [4,5].
Измерительный канал реализует триангуляционный метод. В соответствии с методом каждая видеокамера измеряет углы визирования лазерного диода, расположенного в контрольной точке. Измеряются углы визирования в горизонтальной и вертикальной плоскостях. Для этого ПЗС-матрицы, расположенные в фокальных плоскостях объективов видеокамер, измеряют по две координаты изображений в горизонтальной и вертикальных плоскостях изображений светодиода соответственно (рис. 3).
При решении задачи автоматизированного контроля положения с объектом связываются визирные цели, фиксирующие три и более его контрольных точки. Изображения визирных целей регистрируются оптико-электронным измерительным преобразователем, включающем в общем случае несколько измерительных каналов, с отдельными анализаторами на основе матричных фотоприемников, и с последующей компьютерной (микропроцессорной) обработкой видеокадра. При этом предварительная обработка измерительной информации может осуществляться в непосредственной близости от анализатора, что увеличивает помехозащищённость системы в целом и исключает избыточность информации.
В ОЭС, работающей по методу «угловой засечкой» углы визирования трёх (или более) визирных целей объекта измеряются двумя видеосистемами, каждая из которых включает матричный приёмник оптического излучения (ПОИ) (рис. 2). Обработка видеокадров выполняется микропроцессором.
Угловые поля видеосистем перекрываются, обеспечивая визирование контролируемого объекта, центры объективов видеосистем расположены на известном базовом расстоянии B.
Выполнен теоретический анализ чувствительности ОЭС двух видов к измерению линейных и угловых координат.
В частности, при условии измерительной задачи, когда система работает на дальнем участки дистанции, L >> B, L>> bl ,bd и одной измеряемой координате, чувствительность измерения ОЭС «угловой засечки» смещений x,y и дистанции L до объекта определяются выражениями: [3]
![]() , (1)
, (1)
![]() . (2)
. (2)
Выражения (1),(2) справедливы и для ОЭС метода триангуляции (МТ) «обратной угловой засечки» при замене B на bd. Чувствительность к углам поворота для ОЭС МТ «обратной угловой засечки» определяется выражением
![]() . (3)
. (3)
Выражение (3) определяет чувствительность измерения поворота Θ3 при b = bd и измерения поворотов Θ1, Θ2 при b = bl.
В ОЭС МТ «угловой засечки» величина b базы между визирными целями не известна заранее, а определяется в процессе измерения линейных координат, что определяет потенциально большую погрешность измерения углов поворота по сравнению с ОЭС МТ «обратной угловой засечки».
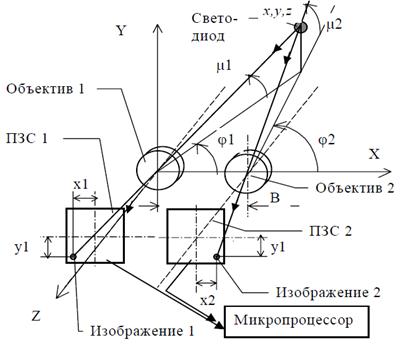
Рисунок 3 – Принцип работы прибора по методу «угловой засечки»
Углы визирования и координаты контрольной точки определяются следующими соотношениями:
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
где ![]() , f - фокусное расстояние объектива, В – базовое расстояние между осями видеокамер.
, f - фокусное расстояние объектива, В – базовое расстояние между осями видеокамер.
Контроль поверхности площадок проходит в два этапа. На первом – контроль положения посадочных мест проводится без технологических нагрузок. На втором этапе контроль посадочных мест проводится после проведения испытаний. Отражающие зеркала от смещений вдоль оптической оси и от поперечных смещений предохраняют металлические пластины, установленные на площадках.
Описанный ниже способ позволяет выявить оптическим способом стабильность положения посадочных площадок под чувствительные элементы и оценить воздействие внешней среды. На рис. 4 и 5 показаны оптические схемы измерений стабильности положения посадочных мест под чувствительные элементы. На рис. 5 представлен общий вид конструкции с посадочными местами под ЧЭ СУД.
В первом случае на рис. 4 приводится оптическая схема для определения отклонений площадки чувствительных элементов. Углы β и γ задаются из условия, что зеркала на базовой и измеряемой поверхности должны устанавливаться строго перпендикулярно оптической оси измерительного прибора 2 (например, телекамера). Угол a - находится как α = β - γ . В данной схеме лазерный излучатель устанавливается на теодолите и необходим для определения точки пересечения опорной и измеряемой оси.
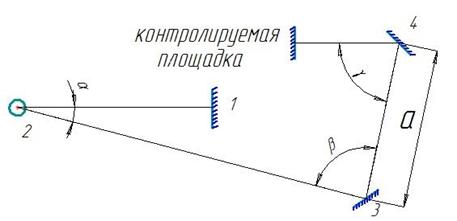
Рисунок 4 – Оптическая система для определения отклонений площадок конструкции подвески чувствительных элементов: 1-базовая площадка, 2-измерительный прибор, 3, 4-зеркала для определения места пересечения оптических осей, 5-исследуемая площадка
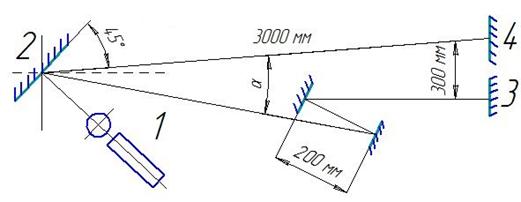
Рисунок 5 – Измерение положения посадочных мест под чувствительные элементы: 1 - лазер и теодолит; 2 – большое зеркало; 3 – контролируемая площадка; 4 – «базовая» площадка (α = 10˚02’34’’)
Оптические оси базовой и исследуемой площадок лежат в одной плоскости. Если они параллельны друг другу, то задается условие перекрестия. Расстояние и углы между зеркалами 3 и 4 в процессе проведения измерений не изменяют свою величину. На рис. 5 приводится опытная схема измерений угла между зеркалами 3 и 4 с использованием оптического усилителя (зеркало 2). После каждого вида испытаний узел посадочной площадки индивидуально устанавливается в схему вертикального контроля. При проведении испытаний требуется минимизировать деформацию поверхности зеркал от торцевых нагрузок в пределах 10''. В соответствии с комплексной программой экспериментальной отработки собранный узел посадочного места зеркала подвергается испытаниям с целью подтверждения сохранности его характеристик: транспортные технологические испытания; испытания на прочность к воздействию линейных ускорений по осям Х и Y (вдоль оптической оси зеркала и в поперечном направлении); испытания на кратковременные динамические ускорения по осям Х и Y; испытания на прочность к воздействию пониженной (- 50°С) и повышенной (+ 50°С) температуры; термовакуумные испытания, при которых температура зеркала изменялась в пределах ±5°С; при этом во всем диапазоне изменения температуры от +12°С до +28°С контролируется качество зеркала.
При выборе параметров лазерного излучения, расчёт которых следует провести, необходимо исходить из того, что их число должно быть минимальным, так как большой объём полученных результатов может затруднять их использование. Как правило, наибольшие изменения аберраций имеют место для лучей, идущих на край входного зрачка и край поля изображения. Поэтому для подавляющего большинства оптических систем достаточно ограничиться расчётом следующих лучей: для точки на оси – луча, идущего на край входного зрачка и для края поля изображения – главного луча; двух меридиональных лучей, идущих на верхний и нижний края входного зрачка (с учётом виньетирования) и одного внемеридионального луча, идущего в точку зрачка с координатами m=0, M=mmax, где mmax – радиус зрачка.
Для оптических систем, работающих с большой числовой апертурой (с большим относительным отверстием), целесообразно рассчитать осевой и внеосевой лучи для зоны входного зрачка с координатой m =![]() . Для систем со средними и большими полями изображений следует дополнительно рассчитать лучи пучка, идущего из точки предмета с ординатой y =
. Для систем со средними и большими полями изображений следует дополнительно рассчитать лучи пучка, идущего из точки предмета с ординатой y = ![]() (или при
(или при ![]() для
для ![]() =
=![]() ), где ymax – размер предмета,
), где ymax – размер предмета, ![]() max – синус угла поля.
max – синус угла поля.
Основными требованиями на первом этапе контроля посадочных мест под чувствительные элементы являются: диапазон измерений - от 0' до 10'. погрешность измерения - 10'', измерения проводятся при нормальных условиях. Параметры окружающей среды не оказывают влияния на точность измерений при обеспечении их стабильности в следующих диапазонах: по температуре - ±5°С; по влажности - ±5%; по давлению - ±10 мм рт. ст., - допустимая амплитуд виброперемещений – не более 5 мм на дистанции 20 м. Система измерений должна позволять производить измерения перемещений по трем координатам, при этом взаимное расположение измеряемых элементов может быть произвольным без ограничения на степень свободы.
Экспериментальные исследования проводились согласно схеме на рис. 4. При отработке методики использовался теодолит 2Т2А, излучатель – полупроводниковый лазер IDL5S-640. Точность измерений составляла 3’’. При длине базовой оси 3 м влияние внешних воздействий не наблюдается.
В результате проведённого анализа выявлены следующие первичные погрешности, определяющие точность измерения линейных и угловых координат контролируемого объекта: погрешность измерения координат центра изображения измерительной марки на ПЗС-матрице измерительного оптико-электронного преобразователя, обусловленная шумами и дискретностью приёмной площадки и погрешность измерения, определяемая отклонением величины фокусного расстояния объективов от номинального значения.
Таким образом, разработанная методика контроля положений посадочных мест с использованием полупроводникового лазера позволяет сократить трудоёмкость испытаний, в том числе процесса наладки системы, в 3–4 раза. При этом точность измерений системы составляла 0,1'', а при длине базовой оси 3 м влияние внешних воздействий не наблюдается.
Литература
- Ворона А.М., Коняхин И.А. Исследование регулярного виньетирования в оптико-электронных системах измерения угловых деформаций крупногабаритных конструкций // Изв. ВУЗов. «Приборостроение». Т. 51, 2008. № 9. С. 14-18.
- Аникст Д.А., Константинович К.М., Меськин И.В. Высокоточные угловые измерения. М.: Машиностроение, 1987. 480 с.
- Михеев С.В., Коняхин И.А. Моделирование оптической системы измерения координат объекта методом обратной линейной засечки // Сборник трудов VI Международной конференции “Прикладная оптика” 18-21 октября 2004 г, СПб, Т.1 "Оптическое приборостроение". СПб.: 2004. С. 335-338.
- Коняхин И.А. Панков Э.Д. Трёхкоординатные оптические и оптико-электронные угломеры. М.: Недра 1991. 224 с.
- Михеев С.В. Моделирование оптической системы измерения координат объекта методом обратной угловой засечки //Сборник трудов II межвузовской конференции молодых учёных 28–31 марта 2005 г./ Под редакцией В.Л. Ткалич. Том 3. СПб: СПбГУ ИТМО, 2005. С. 180-183.
References
- Vorona A.M., Konjahin I.A. Issledovanie reguljarnogo vin'etirovanija v optiko-jelektronnyh sistemah izmerenija uglovyh deformacij krupnogabaritnyh konstrukcij // Izv. VUZov. «Priborostroenie». T. 51, 2008. № 9. S. 14-18.
- Anikst D.A., Konstantinovich K.M., Mes'kin I.V. Vysokotochnye uglovye izmerenija. M.: Mashinostroenie, 1987. 480 s.
- Miheev S.V., Konjahin I.A. Modelirovanie opticheskoj sistemy izmerenija koordinat ob#ekta metodom obratnoj linejnoj zasechki // Sbornik trudov VI Mezhdunarodnoj konferencii “Prikladnaja optika” 18-21 oktjabrja 2004 g, SPb, T.1 "Opticheskoe priborostroenie". SPb.: 2004. S. 335-338.
- Konjahin I.A. Pankov Je.D. Trjohkoordinatnye opticheskie i optiko-jelektronnye uglomery. M.: Nedra 1991. 224 s.
- Miheev S.V. Modelirovanie opticheskoj sistemy izmerenija koordinat ob#ekta metodom obratnoj uglovoj zasechki //Sbornik trudov II mezhvuzovskoj konferencii molodyh uchjonyh 28–31 marta 2005 g./ Pod redakciej V.L. Tkalich. Tom 3. SPb: SPbGU ITMO, 2005. S. 180-183.