СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ПО УСИЛИЮ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИЛОКОМПЕНСИРУЮЩИХ СИСТЕМ, ОБЕСПЕЧИВАЮЩИХ ГОРИЗОНТАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ КОСМОНАВТОВ

Киво А.М.1, Кантлоков Б.Н.2, Акопян К.А.3
1Кандидат технических наук, 2,3cтудент,
Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова
СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ПО УСИЛИЮ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИЛОКОМПЕНСИРУЮЩИХ СИСТЕМ, ОБЕСПЕЧИВАЮЩИХ ГОРИЗОНТАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ КОСМОНАВТОВ
Аннотация
В статье приведены основные типы обратных связей, применяемые в системе управления электромеханических силокомпенсирующих систем, которые способны обеспечить требуемые параметры движения космонавтов в горизонтальной плоскости тренажеров, предназначенных для моделирования пониженной гравитации. Предложено решение задачи синтеза корректирующего устройства по усилию электромеханических силокомпенсирующих систем тележки и моста, обеспечивающих горизонтальные перемещения космонавтов. Используя математические модели рассматриваемых систем, получены результаты синтеза корректирующих устройств по усилию в ременной передаче.
Ключевые слова: тренажер для космонавтов, синтез, система управления, корректирующее устройство, компенсация усилия, обратная связь, двухмассовая система, математическое моделирование.
Kivo A.M.1, Kantlokov B.N.2, Akopyan K.A.3
1PhD in Engineering, 2Student, 3Student,
Platov South-Russian State Polytechnic University
SYNTHESIS OF CORRECTING FORCING DEVICE FOR ELECTROMECHANIC FORCE-COMPENSATIVE SYSTEMS PROVIDING HORIZONTAL DISPLACEMENTS OF ASTRONAUTS
Abstract
The paper presents the main types of feedbacks used in the control system of electromechanical force-compensating systems that are capable of providing the required parameters for the movement of astronauts in the horizontal plane of simulators intended for low gravity simulation. The solution of the problem of synthesizing a correcting device by the force of electromechanical force-compensating systems of a cart and a bridge providing horizontal displacement of astronauts is proposed. Using mathematical models of the systems under consideration, the results of the synthesis of correcting devices for the force in the belt transmission are obtained.
Keywords: simulator for cosmonauts, synthesis, control system, correcting device, force compensation, feedback, two-mass system, mathematical modeling.
Анализ существующих способов физического моделирования пониженной гравитации на Земле показал, что для подготовки космонавтов к работе в гравитационных условиях Луны и Марса наиболее перспективными являются тренажеры с многокоординатными электромеханическими силокомпенсирующими системами (ЭМСКС) [1].
В таких тренажерах горизонтальные перемещения объектов осуществляются при помощи ЭМСКС тележки и моста [2]. В качестве основных обратных связей, которые обеспечивают требуемые параметры движения объекта в горизонтальной плоскости, необходимо использовать отрицательную обратную связь (ООС) по току, гибкую ООС по усилию в ременной передаче и ООС по углу отклонения канатного подвеса (см. рис.1).
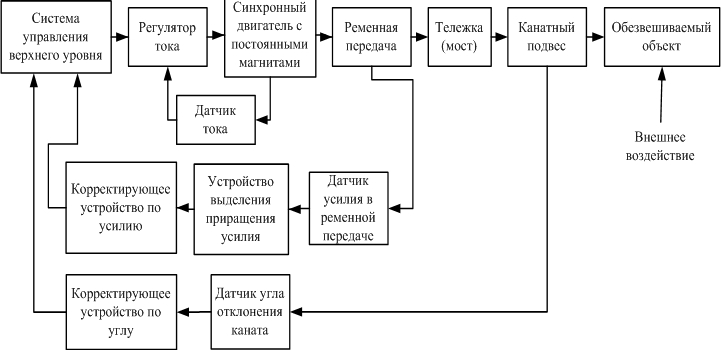
Рис. 1 – Функциональная схема системы управления ЭМСКС тележки (моста)
Применяемая ООС по усилию предназначена для уменьшения влияния упругих колебаний в ременной передаче на параметры движения объекта обезвешивания. Минимизировать влияние упругих колебаний усилия в ременной передаче возможно за счет увеличения коэффициента усиления канала регулирования усилия [3]. Но увеличение коэффициента усиления снижает устойчивость системы, повышая колебательность. Поэтому необходимо выполнить синтез корректирующего устройства по усилию, который обеспечит минимальное значение времени переходного процесса tПП и перерегулирования σ ≤ 2 %.
В настоящее время для систем, в которых основные параметры движения объекта задаются внешним возмущающим воздействием, синтез цифровых регулирующих устройств рекомендуется выполнять с использованием методов прямого синтеза, основанных на применении моделей объекта управления в переменных состояния [4] или параметрических передаточных функций [5]. Исследования, выполненные в работе [3] показали, что метод параметрических передаточных функций является наиболее эффективным для решения задач прямого синтеза цифровых регуляторов при случайных и детерминированных возмущениях.
Для решения задачи синтеза параметров КУ по усилию в ременной передаче, рассмотрим двухмассовую ЭМСКС, кинематическая схема которой представлена на рис.2. Электродвигатель с помощью ременной передачи при действии внешнего возмущающего воздействия осуществляет горизонтальное перемещение исполнительного механизма (ИМ). При этом перемещение ИМ sИМ характеризуется его положением, отсчитываемым относительно ведущей шестерни.
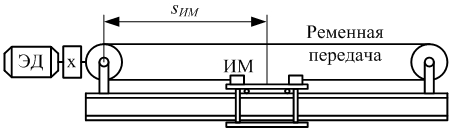
Рис. 2 – Кинематическая схема двухмассовой ЭМСКС с ременной передачей
Для решения задачи синтеза КУ по усилию, согласно рис.2, получим обобщенную структурную схему ЭМСКС, которая представлена на рис.3.
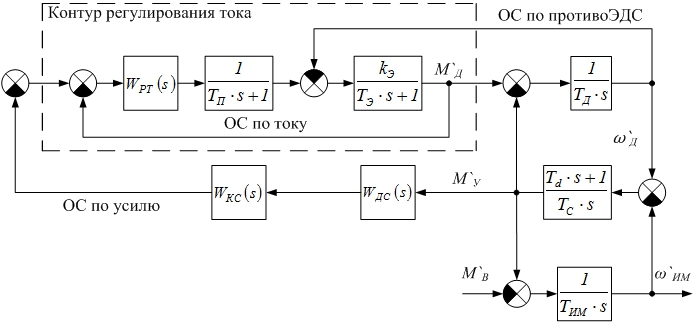
Рис. 3 – Обобщенная двухмассовая структурная схема ЭМСКС с ременной передачей
На рис.3 обозначены: WРТ(s) – передаточная функция регулятора тока (РТ); TП – постоянная времени, учитывающая инерционность преобразователя; kЭ – коэффициент передачи электродвигателя (ЭД); TЭ – электромагнитная постоянная времени; TД – механическая постоянная времени, учитывающая инерционность ЭД; Td – постоянная времени, учитывающая диссипативные свойства ремня; TC – постоянная времени, учитывающая упругие свойства ремня; TИМ – механическая постоянная времени, учитывающая инерционность ИМ; WДС(s) – передаточная функция датчика усилия; WКС(s) – передаточная функция КУ по усилию; M`Д –момент, развиваемый на валу ЭД, о.е.; M`В –момент внешних сил, приведенный к ротору ЭД о.е.; M`У –момент упруго-диссипативных сил, приведенный к ротору ЭД, о.е.; ω`Д – скорость вращения ротора ЭД, о.е.; ω`ИМ – скорость перемещения ИС, приведенная к ротору ЭД, о.е.
Исследования, выполненные в работе [6] показали, что для описания динамических свойств датчика усилия допустимо использовать передаточную функцию вида:
![]() (1)
(1)
где kДС – коэффициент усиления датчика усилия; TДС – постоянная времени датчика усилия.
Для синтеза КУ по усилию в ременной передаче необходимо знать структуру и параметры неизменяемой части системы, поэтому на начальном этапе следует выполнить синтез регулятора тока, обеспечивающего необходимое быстродействие [7]. Согласно рекомендациям в [8] целесообразно выполнить синтез РТ по принципу систем подчиненного регулирования с настройкой на модульный оптимум.
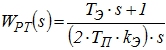 (2)
(2)
На следующем этапе следует свернуть контур регулирования тока, а его свойства учитывать передаточной функцией вида
 (3)
(3)
где kЗКТ – коэффициент передачи замкнутого контура регулирования тока (ЗКТ); TЗКТ – постоянная времени ЗКТ.
При использовании математического описания с использованием относительных единиц коэффициенты kДС = kЗКТ = 1.
Использование подходов, приведенных в [9], а также сопоставление частотных характеристик механической и электрической частей системы показали, что при достаточном быстродействии ЗКТ и датчика усилия, когда их частоты пропускания сигнала в несколько раз превышают собственную частоту колебаний исследуемого объекта, рекомендуется использовать КУ по усилию с передаточной функцией
![]() (4)
(4)
где kКС – коэффициент определяющий отношение дифференцирующей составляющей к апериодической; TКС – постоянная времени КУ; kК – коэффициент учитывающий необходимое изменение постоянных времени при различных положениях ИМ.
Работа ременной передачи при функционировании ЭМСКС определяет постоянные времени TC и Td, характеризующие упругие и диссипативные свойства системы. Так как значения TC и Td изменяются в зависимости от положения ИМ, то может потребоваться применение адаптивного управления. Исследования, выполненные в работе [10] показали, что параметры КУ рекомендуется определять при максимальном значении TC, т.е. при минимальном значении эквивалентной жесткости ременной передачи, не применяя адаптивное управление. Следовательно, и при минимальных значениях TC можно получить приемлемые результаты.
Определение параметров КУ по усилию, которое позволяет устранить колебания усилия в ременной передаче, рекомендовано осуществлять с использованием инструментов «Simulink Control Design» (MATLAB), что позволило выполнить автоматическую настройку регуляторов в Simulink путем использования блоков типа «PID controller». Исследования показали, что, если не применять адаптивное управление, то параметры КУ должны быть определены при максимальном значении TC, соответствующей минимальному значению эквивалентной жесткости ременной передачи. При такой настройке КУ обеспечивает приемлемые результаты управления усилиями в упругой ременной передаче и при минимальных значениях TC.
Для оценки показателей качества функционирования ЭМСКС тележки и моста перспективного тренажера, используя рекомендации, полученные в результате синтеза КУ по усилию, проведем математическое моделирование в соответствии со структурными схемами, представленными на рис.4 и рис.5.
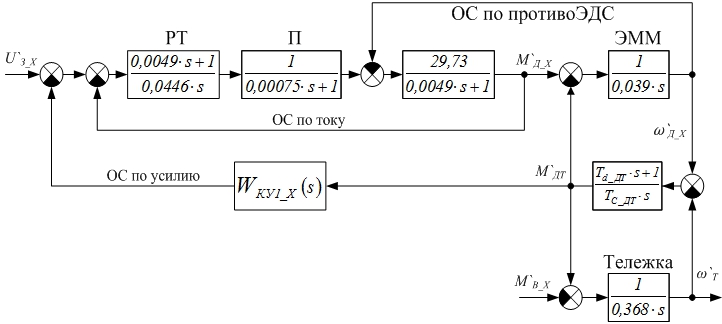
Рис. 4 – Обобщенная двухмассовая структурная схема ЭМСКС тележки
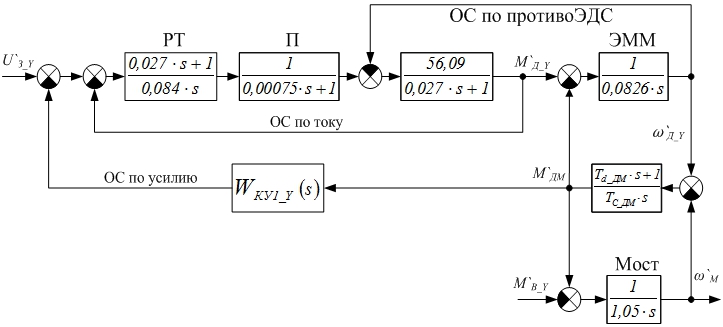
Рис. 5 – Обобщенная двухмассовая структурная схема ЭМСКС моста
С использованием инструментов «Simulink Control Design» (MATLAB) получены передаточные функции КУ по усилию в ременной передаче:
– для ЭМСКС тележки ![]() ;
;
– для ЭМСКС моста ![]() .
.
На рис. 6 и рис. 7 приведены графики переходных процессов по усилию в ременной передаче ЭМСКС тележки и моста без применения ООС по усилию и с применением ООС по усилию. При этом значение импульсного возмущающего воздействия, приложенного к объекту, для тележки составляет MВ_X = 1,226 о.е., а для моста – MВ_Y = 0,273о.е., что в обоих случаях эквивалентно 200 Н. Начальное положение исполнительного механизма в обоих случаях принято равным при sИМ= 4м.
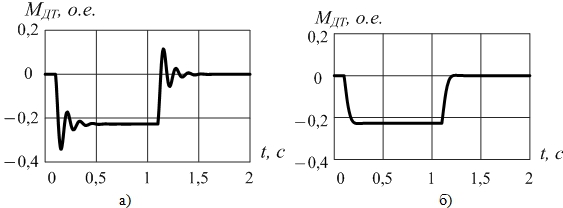
Рис. 6 – Графики переходных процессов по усилию в ременной передаче ЭМСКС тележки: а) без ООС по усилию; б) с ООС по усилию
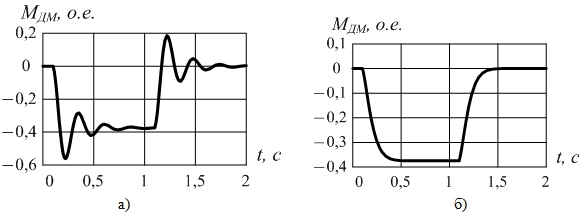
Рис. 7 – Графики переходных процессов по усилию в ременной передаче ЭМСКС моста: а) без ООС по усилию; б) с ООС по усилию
В результате решения задачи синтеза КУ по усилию ЭМСКС тележки и моста с ременной передачей получены следующие результаты:
– в ЭМСКС тележки без ООС по усилию время переходного процесса tПП = 0,51 с при перерегулировании σ = 56 %, а после применения гибкой ООС по усилию с рекомендуемыми параметрами – tПП ≤ 0,082 с, σ ≤ 2 %;
– в ЭМСКС моста без ООС по усилию время переходного процесса tПП = 0,72 с при перерегулировании σ = 50 %, а после применения гибкой ООС по усилию с рекомендуемыми параметрами – tПП ≤ 0,267 с, σ = 0 %.
Выполненные в работе исследования показали, что, использование синтезированного КУ по усилиюв ЭМСКС позволяет уменьшить влияние упругих колебаний в ременной передачей на параметры движения объекта, позволяя повысить надёжность и долговечность работы механизмов перемещения тележки и моста.
Список литературы / References
- Игнатьев С.В., Хрипунов В.П. Задачи и принципы создания комплекса тренажеров для подготовки космонавтов по лунной и марсианской программам. Пилотируемые полеты в космос. 2011. № 2 (2). С. 94-98.
- Пятибратов Г.Я. Особенности создания силокомпенсирующих систем при реализации сложных пространственных перемещений объектов / Г.Я. Пятибратов, А.М. Киво, О.А. Кравченко, Н.А. Сухенко // Изв. вузов. Электромеханика. – 2013. – № 5.- С. 39-43.
- Барыльник Д.В. Электромеханическая система компенсации силы тяжести с асинхронным частотно-регулируемым электроприводом дис. ... канд. техн. наук. Юж.-Рос. гос. техн. ун-т (НПИ), Новочеркасск, 2009.
- Демыдюк М.В. Задачи динамики и управления движением манипуляционных роботов с упругими звеньями: Автореферат дис… канд. физ.-мат. наук: 01.02.01.– М., 1993.– 18с.
- Шапшал А.С. Оптимизация и идентификация упругих элементов рессорного подвешивания локомотивов: Автореферат дис… канд. техн. наук.– Ростов н/Д, 1994.– 19с.
- Гукасян А.А. Управление и оптимизация движений манипуляционных роботов с абсолютно твердыми и упругими звеньями: Автореферат дис. д-ра физ.-мат. наук: 01.02.01.– М., 1996.– 35 с.
- КравченкоО.А. Управление электроприводами при учете реальных свойств механических передач: Учебное пособие / Юж.-Рос. гос. техн.ун-т. – Новочеркасск: ЮРГТУ (НПИ), 2003. – 73с.
- Пятибратов Г.Я. Возможности применения электроприводов для активного ограничения колебаний упругих механических передач // Изв. вузов. Электромеханика. – 1990. – № 10. – С. 89–93.
- Пятибратов Г.Я. Синтез систем подчиненного регулирования электроприводов, минимизирующих динамические нагрузки в упругих механических передачах // Изв. вузов. Электромеханика. – 1982. – № 3. – С. 296–303.
- Пятибратов Г.Я. Принципы построения и реализации систем управления усилиями в упругих передачах электромеханических комплексов // Изв. вузов. Электромеханика. – 1998. – № 5-6. – С. 73–83.
Список литературы на английском языке / References in English
- Ignatiev S.V., Khripunov V.P. Zadachi i printsipy sozdaniya kompleksa trenazherov dlya podgotovki kosmonavtov po lunnoy i marsianskoy programmam. Pilotiruyemyye polety v kosmos. [Problems and Principles for Development of Set of Simulators for Training Astronauts in Lunar and Martian Programs. Manned Flights into Space] 2011. No. 2 (2). P. 94-98. [In Russian]
- Pyatibratov G.Ya. Osobennosti sozdaniya silokompensiruyushchikh sistem pri realizatsii slozhnykh prostranstvennykh peremeshcheniy ob"yektov [Features of Development of Power Compensating Systems in Implementation of Complex Spatial Displacements of Objects] / G.Ya. Pyatibratov, A.M. Kivo, O.A. Kravchenko, N.A. Sukhenko // News of universities. Electromechanics. - 2013. - No. 5.- P. 39-43. [In Russian]
- Barynnik D.V. Elektromekhanicheskaya sistema kompensatsii sily tyazhesti s asinkhronnym chastotno-reguliruyemym elektroprivodom [Electromechanical System of Gravity Compensation with Asynchronous Frequency-controlled Electric Drive] PhD thesis in Engineering. South-Russian. state. tech. un (NPI), Novocherkassk, 2009. [In Russian]
- Demydyuk M.V. Zadachi dinamiki i upravleniya dvizheniyem manipulyatsionnykh robotov s uprugimi zven'yami [Problems of Dynamics and Control of Movement of Manipulative Robots with Elastic Links]: Abstract of PhD thesis in Physics and Mathematics: 01.02.01 .- M., 1993.- 18 p. [In Russian]
- Shapshal A.S. Optimizatsiya i identifikatsiya uprugikh elementov ressornogo podveshivaniya lokomotivov [Optimization and Identification of Elastic Elements of Spring Suspension of Locomotives:] Abstract of PhD thesis in Engineering.- Rostov n/D, 1994. - 19 p. [In Russian]
- Gukasyan A.A. Upravleniye i optimizatsiya dvizheniy manipulyatsionnykh robotov s absolyutno tverdymi i uprugimi zven'yami [Management and Optimization of Movements of Manipulative Robots with Absolutely Rigid and Elastic Links]: Abstract of PhD thesis in Physics and Mathematics: 01.02.01. - M., 1996. - 35 p. [In Russian]
- Kravchenko O.A. Upravleniye elektroprivodami pri uchete real'nykh svoystv mekhanicheskikh peredach: Uchebnoye posobiye [Control of Electric Drives Considering Real Properties of Mechanical Transmission: Textbook] / South-Russian. state. tech. - Novocherkassk (NPI), 2003. - 73 p. [In Russian]
- Pyatibratov G.Ya. Vozmozhnosti primeneniya elektroprivodov dlya aktivnogo ogranicheniya kolebaniy uprugikh mekhanicheskikh peredach [Possibilities of Usage of Electric Drives for Active Limitation of Elastic Mechanical Oscillations] // News of universities. Electromechanics. - 1990. - No. 10. - P. 89-93. [In Russian]
- Pyatibratov G.Ya. Sintez sistem podchinennogo regulirovaniya elektroprivodov, minimiziruyushchikh dinamicheskiye nagruzki v uprugikh mekhanicheskikh peredachakh [Synthesis of Systems of Subordinate Regulation of Electric Drives, which Minimize Dynamic Loads in Elastic Mechanical Transmissions] // News of universities. Electromechanics. - 1982. - No. 3. - P. 296-303. [In Russian]
- Pyatibratov G.Ya. Printsipy postroyeniya i realizatsii sistem upravleniya usiliyami v uprugikh peredachakh elektromekhanicheskikh kompleksov [Principles of Construction and Implementation of Control Systems by Forces in Elastic Transmissions of Electromechanical Complexes] // Izv. universities. Electromechanics. - 1998. - No. 5-6. - P. 73-83. [In Russian]