Эволюция интеллектуальных транспортных систем: от локальных решений к единой транспортной нейросети
Эволюция интеллектуальных транспортных систем: от локальных решений к единой транспортной нейросети
Аннотация
Статья посвящена комплексному исследованию эволюции интеллектуальных транспортных систем (ИТС) и теоретическому обоснованию парадигмального перехода к новому этапу их развития. Целью исследования является разработка и детальное описание концептуальной модели «единой транспортной нейросети» — интегрированной, самообучающейся киберфизической системы, способной системно решать транспортные проблемы современных агломераций. Методологической базой работы выступили системный анализ, методы декомпозиции и концептуального моделирования сложных систем. В качестве основных результатов в работе представлена детализированная декомпозиция целей ИТС с введением ключевых показателей эффективности (KPI), а также развернутая иерархическая модель технологических систем. Центральным результатом является предложенная авторская пятиуровневая архитектура «транспортной нейросети», подробно описывающая взаимодействие физического уровня (Edge-вычисления), коммуникационного уровня (гибридные сети 5G/C-V2X), интеллектуального ядра (AI/ML, цифровые двойники), сервисного уровня и пользовательских интерфейсов. В ходе обсуждения проводится сравнительный анализ предложенной концепции с существующими подходами (IoV, C-ITS), глубоко анализируются технологические, нормативно-правовые, экономические и этические барьеры. Заключение формулирует выводы о том, что реализация концепции транспортной нейросети знаменует собой переход от реактивного к прогностическому управлению транспортом и является фундаментальной основой для построения устойчивых и безопасных городов будущего.
1. Введение
Современная урбанистика столкнулась с исчерпанием парадигмы экстенсивного развития транспортной инфраструктуры. Строительство новых дорог и развязок в мегаполисах не только не решает проблему заторов, но зачастую усугубляет ее из-за эффекта «спровоцированного спроса». Экономические потери от пробок, достигающие 2–5% ВВП развитых стран , колоссальный социальный ущерб от аварийности (более 1,3 млн смертей в год в мире ) и деградация окружающей среды требуют кардинально новых подходов.
Ответом на эти вызовы становится интенсивное развитие интеллектуальных транспортных систем (ИТС) — сложных киберфизических систем, интегрирующих информационно-коммуникационные технологии (ИКТ) и искусственный интеллект (ИИ) в транспортный комплекс. Эволюция ИТС прошла путь от изолированных систем (ИТС 1.0) и централизованных центров управления (ИТС 2.0) к современному этапу внедрения кооперативных систем (ИТС 3.0), основанных на технологии V2X (Vehicle-to-Everything) (рисунок 1). Однако даже эти системы зачастую представляют собой набор слабо связанных сервисов.
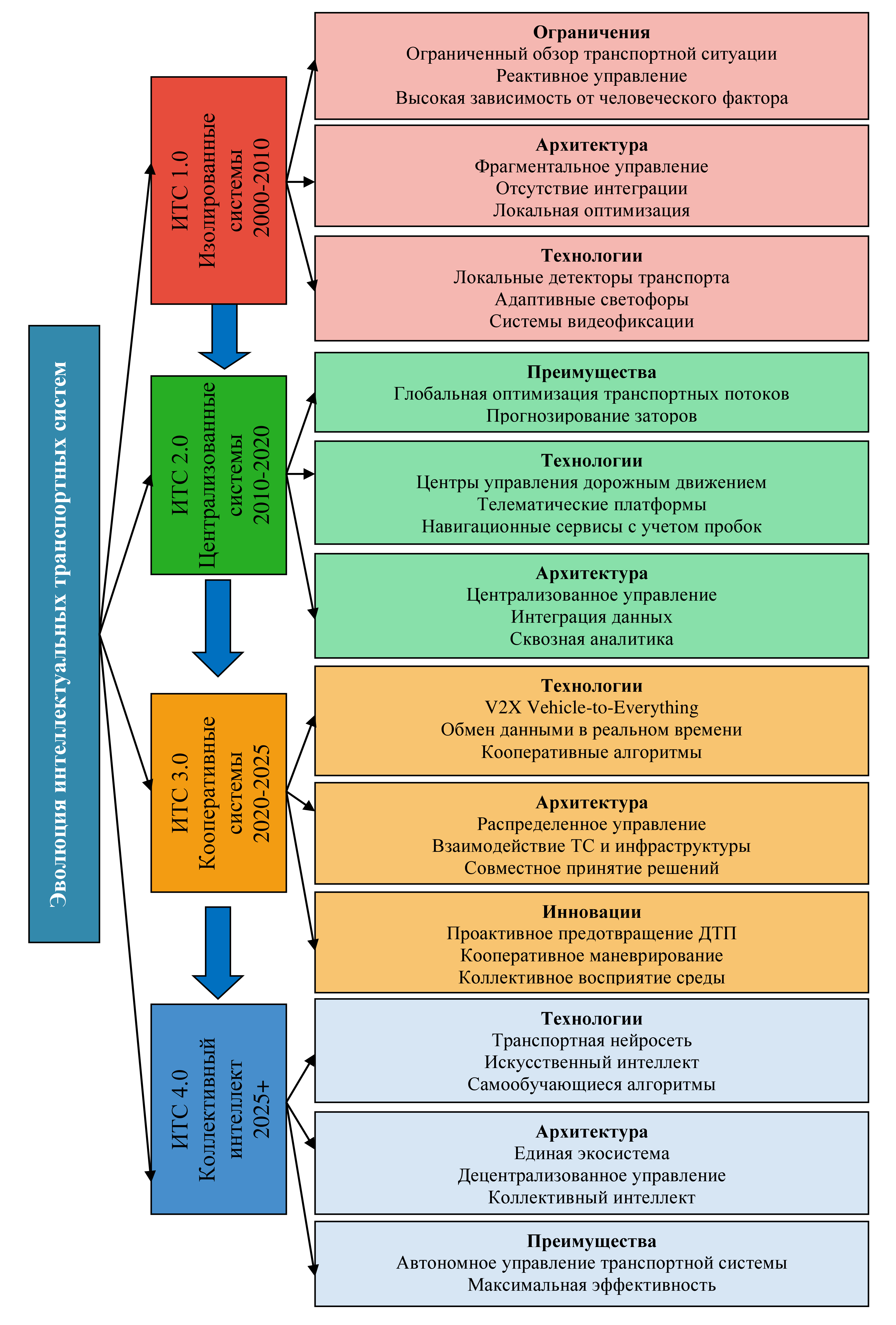
Рисунок 1 - Эволюция ИТС
Цель работы — разработать и теоретически обосновать концептуальную модель «единой транспортной нейросети» как следующего этапа эволюции ИТС.
Для достижения цели поставлены следующие задачи:
1. Провести декомпозицию стратегических целей ИТС с определением количественных KPI.
2. Систематизировать технологический стек современных ИТС в виде иерархической модели систем.
3. Разработать детализированную пятиуровневую архитектуру «транспортной нейросети».
4. Провести глубокий анализ перспектив, барьеров и рисков внедрения предложенной концепции.
Научная новизна заключается в том, что впервые предложена и структурно описана пятиуровневая архитектура «транспортной нейросети», которая, в отличие от существующих концепций, целостно объединяет периферийные вычисления (Edge), гибридные коммуникации, интеллектуальное ядро на базе цифровых двойников и AI/ML, а также сквозную систему кибербезопасности, формируя единый контур управления.
2. Методы и принципы исследования
Исследование носит междисциплинарный характер и опирается на методологию системной инженерии. Исследование проводилось путем критического анализа и синтеза актуальных научных публикаций (IEEE, Springer, Elsevier), отраслевых стандартов (SAE, ETSI, ГОСТ), отчетов консалтинговых агентств (McKinsey, Gartner) и нормативных документов за период 2015-2023 гг.
1. Системный анализ. ИТС рассматривается как «система систем» (System of Systems), характеризующаяся операционной и управленческой независимостью компонентов, эмерджентностью поведения и эволюционным развитием. Этот подход позволил адекватно описать сложность и многоаспектность объекта исследования.
2. Метод декомпозиции (Work Breakdown Structure). Применен для построения «дерева целей» и «дерева систем». Генеральная цель была последовательно разложена на измеримые задачи (SMART-критерии), а технологический комплекс — на функциональные подсистемы .
3. Концептуальное моделирование. На основе принципов сервис-ориентированной архитектуры (SOA) и многоуровневого представления была разработана модель «транспортной нейросети». Модель описывает логическую структуру системы, ее функциональные блоки и информационные потоки между ними.
4. Форсайт-методы. Для анализа перспектив развития ИТС до 2035 года применялись элементы технологического форсайта , включая анализ трендов, выявление «слабых сигналов» и построение сценариев развития.
3. Основные результаты
3.1. Декомпозиция целей ИТС и ключевые показатели эффективности (KPI)
Для формализации требований к ИТС была разработана иерархия целей с конкретными KPI (рис. 2).
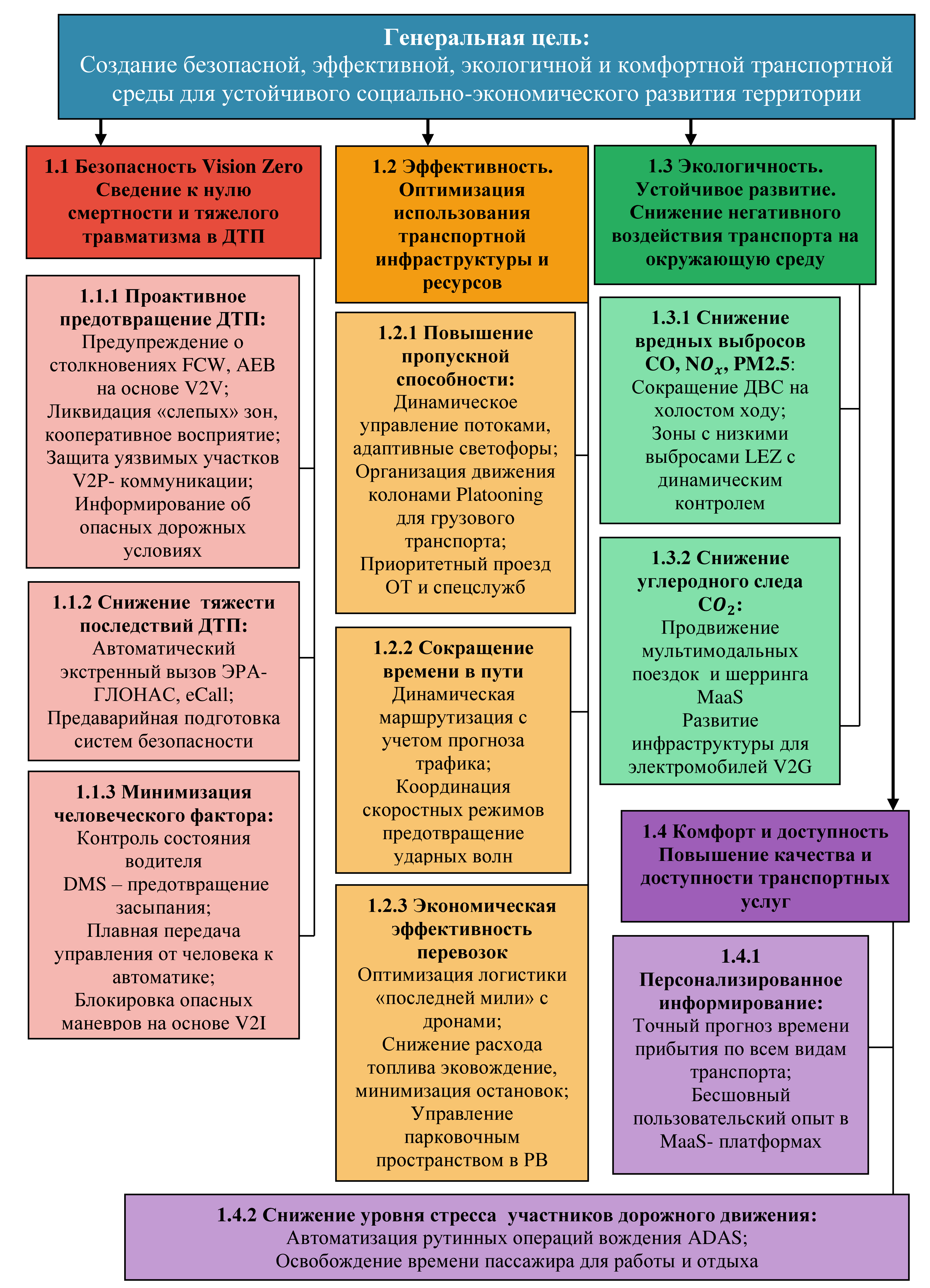
Рисунок 2 - Дерево целей ИТС
Генеральная цель: создание безопасной, эффективной, экологичной и комфортной транспортной среды.
3.1.1. Направление 1: Безопасность (VISION ZERO)
KPI: снижение показателя FAR (Fatal Accident Rate, смертей на 100 млн авт.-км) на 90%; сокращение числа ДТП с пострадавшими на 75%.
· Механизмы достижения: внедрение систем предотвращения столкновений (CAS), автоматического экстренного торможения (AEB), кооперативных систем предупреждения об опасности (V2V-warnings), интеллектуального управления скоростным режимом (ISA).
3.1.2. Направление 2: Эффективность
· Задача: оптимизация использования транспортной инфраструктуры и ресурсов.
· KPI: увеличение средней скорости движения в часы пик на 30%; повышение пропускной способности ключевых магистралей на 50%; сокращение времени поиска парковки на 80%.
· Механизмы достижения: адаптивное управление светофорами на основе данных в реальном времени, динамическое ценообразование на парковку и проезд, оптимизация маршрутов грузового транспорта, координированное управление коридорами («зелёная волна 2.0»).
3.1.3. Направление 3: Экологичность
· Задача: снижение негативного воздействия транспорта на окружающую среду.
· KPI: снижение выбросов CO₂ от городского транспорта на 50%; сокращение концентрации твердых частиц PM2.5 вблизи магистралей на 60%.
· Механизмы достижения: экологически оптимальная маршрутизация (Eco-routing), синхронизация светофоров для минимизации остановок и разгонов, интеграция с сетями зарядной инфраструктуры для электротранспорта, стимулирование использования общественного транспорта через MaaS-платформы.
3.1.4. Направление 4: Комфорт и доступность
· Задача: повышение качества и доступности транспортных услуг.
· KPI: повышение точности прогноза времени прибытия общественного транспорта до 99%; увеличение доли мультимодальных поездок через MaaS-платформы до 40% от общего числа.
· Механизмы достижения: бесшовная интеграция различных видов транспорта, персонализированные рекомендации маршрутов, адаптивное информирование пассажиров, обеспечение доступности для маломобильных групп населения.
3.1.5. Взаимосвязь направлений и синергетический эффект
Важно подчеркнуть, что выделенные направления не являются изолированными. Между ними существуют многочисленные положительные обратные связи. Например, повышение эффективности движения (снижение заторов) одновременно способствует улучшению экологических показателей (меньше холостого хода) и повышению безопасности (снижение агрессивного вождения в условиях стресса). Аналогично, внедрение систем безопасности повышает доверие пользователей к автоматизированным сервисам, что способствует росту комфорта и доступности. Данная синергия является ключевым аргументом в пользу интегрированного, а не изолированного развития компонентов ИТС.
3.2. Архитектура современных ИТС: иерархия систем
Дерево систем описывает технологические комплексы, обеспечивающие достижение целей (рис. 3).
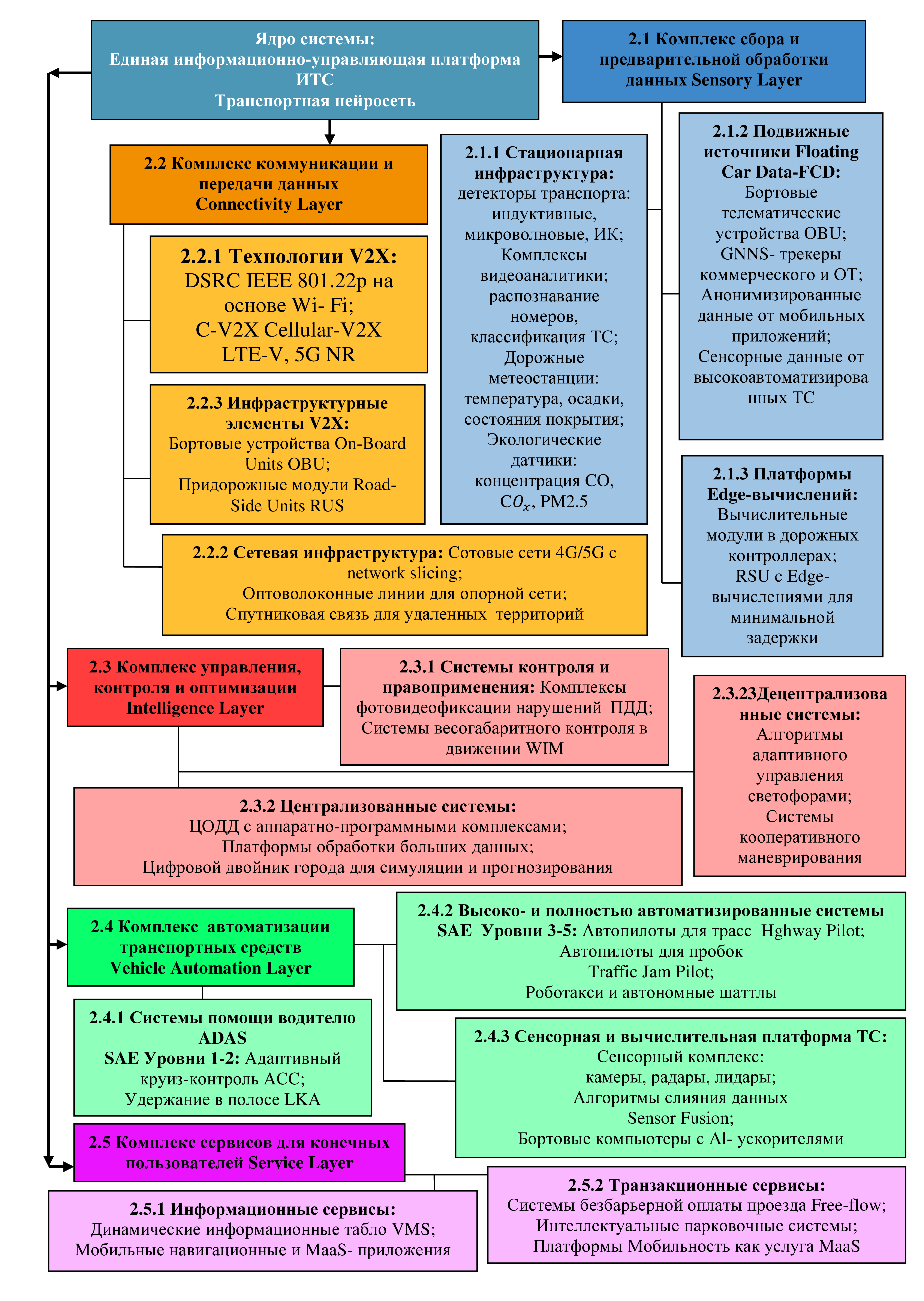
Рисунок 3 - Дерево систем ИТС
3.2.1. Комплекс сбора данных (Sensory layer)
Данный комплекс формирует «органы чувств» транспортной системы и является фундаментом для всех последующих уровней обработки.
Стационарная инфраструктура:
· Детекторы транспортного потока: индуктивные петлевые детекторы (высокая надёжность, низкая стоимость), микроволновые радары (измерение скорости и классификации ТС), ультразвуковые датчики (контроль занятости парковочных мест).
· AI-видеоаналитика: системы на базе архитектур YOLO (You Only Look Once), R-CNN (Region-based Convolutional Neural Networks), Transformer-based модели для детекции объектов, классификации транспортных средств, анализа плотности потока, распознавания государственных регистрационных знаков (ANPR/ALPR), детекции инцидентов (остановившееся ТС, пешеход на проезжей части, задымление).
· Дорожные метеостанции: измерение температуры воздуха и дорожного покрытия, влажности, скорости и направления ветра, видимости, наличия осадков, состояния покрытия (сухое/мокрое/обледенелое).
· Датчики качества воздуха: мониторинг концентрации NOx, CO, O₃, PM2.5, PM10 для оценки экологического воздействия и активации мер по ограничению движения в критических ситуациях.
Подвижные источники данных (Floating Car Data, FCD):
· Бортовые устройства (OBU — On-Board Units): телематические блоки, передающие данные о местоположении, скорости, направлении, ускорении.
· GNSS-трекеры: устройства глобальной навигации (GPS, ГЛОНАСС, Galileo, BeiDou) для точного позиционирования.
· Анонимизированные данные сотовых операторов (CD-R — Call Detail Records): агрегированная информация о перемещении абонентов для анализа корреспонденций и построения матриц origin-destination.
· Данные мобильных приложений: краудсорсинговая информация от навигационных приложений (скорость, инциденты, оценки пользователей).
· Сенсоры автоматизированных ТС: данные с LiDAR (облака точек высокой плотности), радаров (обнаружение объектов в условиях плохой видимости), камер (визуальная информация для SLAM — Simultaneous Localization and Mapping).
Платформы Edge-вычислений:
Вычислительные модули, интегрированные в RSU (Roadside Units) и дорожные контроллеры, обеспечивают первичную обработку данных непосредственно на месте их возникновения. Ключевые функции: агрегация и фильтрация «сырых» данных, локальная детекция инцидентов, генерация тревожных сообщений. Критически важным параметром является задержка обработки — менее 10 мс для задач, требующих немедленной реакции.
3.2.2. Комплекс коммуникаций (Connectivity layer)
Обеспечивает надёжную, безопасную и своевременную доставку информации между всеми участниками транспортной системы.
Технологии V2X (Vehicle-to-Everything):
· C-V2X (Cellular V2X): технология на базе стандартов 3GPP (LTE-V2X, 5G NR V2X), обеспечивающая два режима работы:
· PC5/Sidelink: прямая связь между транспортными средствами и инфраструктурой без участия базовых станций, критически важная для задач безопасности (задержка < 5 мс).
· Uu-интерфейс: связь через сотовую сеть для передачи больших объёмов данных и доступа к облачным сервисам.
· DSRC/ITS-G5: альтернативная технология на базе IEEE 802.11p, применяемая в ряде регионов (преимущественно в Японии и частично в США).
Сетевая инфраструктура:
· Сети 5G с поддержкой Network Slicing: технология, позволяющая создавать виртуальные «слои» сети с гарантированными характеристиками:
· URLLC (Ultra-Reliable Low-Latency Communications): для критически важных сообщений безопасности (задержка < 1 мс, надёжность 99,999%).
· eMBB (enhanced Mobile Broadband): для передачи больших объёмов данных (видео, обновления HD-карт).
· mMTC (massive Machine-Type Communications): для подключения большого числа IoT-устройств.
· Оптоволоконные линии связи (ВОЛС): опорная транспортная сеть, обеспечивающая магистральную связь между узлами системы с пропускной способностью до терабит в секунду.
3.2.3. Комплекс управления и оптимизации (Intelligence layer)
Является «мозгом» транспортной системы, где происходит агрегация данных, их анализ и принятие управленческих решений.
Централизованные системы:
· Центры организации дорожного движения (ЦОДД): операторские центры с функциями мониторинга, управления и координации.
· Платформы Big Data: кластеры на базе Apache Hadoop, Apache Spark, Apache Kafka для потоковой обработки и пакетного анализа больших данных.
· Облачные хранилища (Data Lake): централизованные репозитории для хранения структурированных и неструктурированных данных в «сыром» виде.
· Цифровой двойник города (City Digital Twin): динамическая 4D-модель (3D + время) транспортной системы, синхронизированная с реальностью в режиме, близком к реальному времени. Используется для моделирования сценариев, прогнозирования, обучения ИИ-моделей и тестирования управленческих решений.
Децентрализованные системы:
· Агенты обучения с подкреплением (Reinforcement Learning): автономные агенты на уровне отдельных перекрёстков или коридоров, способные адаптивно управлять светофорами на основе локальных данных и сигналов от соседних агентов.
· Мультиагентные системы (MAS): кооперативные и конкурентные взаимодействия между агентами для достижения глобального оптимума.
3.2.4. Комплекс автоматизации транспортных средств (Vehicle automation layer)
Охватывает технологии, обеспечивающие различные уровни автоматизации вождения согласно классификации SAE J3016.
Системы ADAS (Advanced Driver Assistance Systems) — уровни L1-L2:
· ACC (Adaptive Cruise Control): адаптивный круиз-контроль с поддержанием безопасной дистанции.
· LKA (Lane Keeping Assist): система удержания в полосе.
· AEB (Automatic Emergency Braking): автоматическое экстренное торможение.
· BSM (Blind Spot Monitoring): мониторинг слепых зон.
Системы HAD/FAD (Highly/Fully Automated Driving) — уровни L3-L5:
· Автопилоты: системы, способные полностью управлять ТС в определённых условиях (ODD — Operational Design Domain) без вмешательства водителя.
· Роботакси и беспилотные шаттлы: автономные транспортные средства для перевозки пассажиров.
· Архитектура платформы включает:
· Сенсорное слияние (Sensor Fusion): интеграция данных от множества датчиков для формирования единой картины окружения.
· Построение картины мира (World Model): создание и постоянное обновление модели окружающей среды.
· Модуль принятия решений (Decision Making): планирование траектории, манёвров и управляющих воздействий.
3.2.5. Комплекс сервисов (Service layer)
Преобразует данные и аналитику в ценность для конечных пользователей.
Информационные сервисы (G2C — Government-to-Citizen):
· Динамические информационные табло (DMS — Dynamic Message Signs).
· Мобильные приложения с прогнозами времени в пути, информацией об инцидентах, альтернативными маршрутами.
· Системы раннего предупреждения об опасных метеоусловиях.
Транзакционные сервисы (B2C/B2B):
· Free-flow tolling: безостановочная оплата проезда на основе автоматической идентификации ТС.
· Интеллектуальные парковки: системы навигации к свободным местам, динамическое ценообразование.
· Платформы MaaS (Mobility as a Service): интегрированные приложения для планирования, бронирования и оплаты мультимодальных поездок.
· Логистические сервисы: оптимизация маршрутов доставки, управление автопарком, прогнозирование ETA (Estimated Time of Arrival).
3.3. Концептуальная модель единой транспортной нейросети
Предлагаемая архитектура описывает ИТС 4.0 как целостную самоорганизующуюся систему с пятью логическими уровнями и сквозными компонентами (рис. 4).
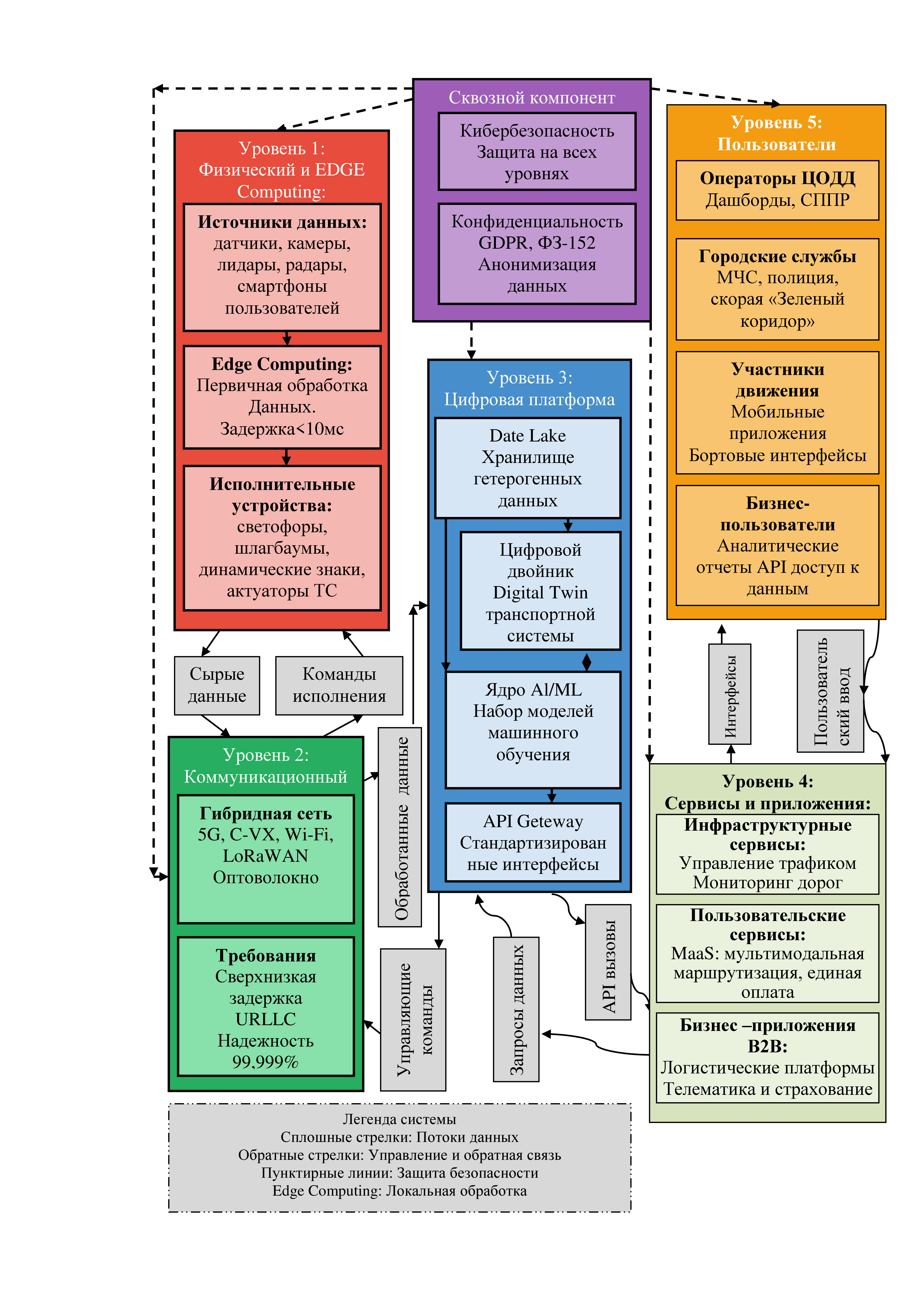
Рисунок 4 - Концепция построения ИТС
3.3.1. Уровень 1: Физический и периферийный (EDGE) уровень
Функции: Восприятие «сырых» данных (raw data) от сенсоров и физическое воздействие на инфраструктуру и транспортные средства.
Ключевые элементы:
· Сенсорная сеть: камеры, радары, LiDAR, детекторы, датчики окружающей среды.
· Исполнительные устройства: светофоры, знаки переменной информации, шлагбаумы, системы оповещения.
· Edge-вычислительные узлы: встроенные в RSU, дорожные контроллеры, бортовые компьютеры ТС.
Критическая роль Edge Computing: Обработка данных непосредственно на месте возникновения (in-situ processing) является ключевой для задач, требующих реакции в реальном времени. Примеры:
· Детекция пешехода, выходящего на нерегулируемый переход, и мгновенная трансляция предупреждения приближающимся ТС (время реакции < 20 мс).
· Локальная оптимизация фазы светофора на основе текущей очереди без ожидания команды от центра.
· Первичная фильтрация и агрегация данных для снижения нагрузки на каналы связи.
Архитектурные принципы:
· Отказоустойчивость: дублирование критических узлов, автономная работа при потере связи с центром.
· Масштабируемость: модульная архитектура, позволяющая наращивать вычислительные мощности.
· Энергоэффективность: применение специализированных процессоров (NPU, FPGA) для задач машинного обучения.
3.3.2. Уровень 2: Коммуникационный (CONNECTIVITY FABRIC)
Функции: Гарантированная, безопасная и своевременная доставка данных между всеми компонентами системы.
Архитектура гибридной гетерогенной сети:
Уровень представляет собой «нервную систему» транспортной нейросети, обеспечивающую связность всех элементов. Ключевой принцип — использование наиболее подходящей технологии для каждого типа коммуникации:
· 5G (Uu-интерфейс):
· eMBB: высокоскоростной доступ к облаку для передачи HD-видео, обновлений картографических данных, загрузки обновлений ПО.
· URLLC-слайсы: выделенные виртуальные каналы с гарантированными параметрами для критически важных управляющих сообщений.
· C-V2X (PC5/Sidelink):
· Прямая связь V2V (Vehicle-to-Vehicle) для обмена BSM (Basic Safety Messages) между транспортными средствами.
· Связь V2I (Vehicle-to-Infrastructure) для взаимодействия с RSU.
· Задержка < 5 мс, что критически важно для сценариев предотвращения столкновений.
· ВОЛС (оптоволоконные линии):
· Транспортная основа (backbone) для связи между ЦОДД, узлами Edge, базовыми станциями.
· Пропускная способность в сотни Гбит/с — Тбит/с.
Управление качеством обслуживания (QoS):
· Приоритизация трафика по классам (safety-critical, operational, informational).
· Динамическое перераспределение ресурсов в зависимости от нагрузки.
· Механизмы резервирования и отказоустойчивости.
3.3.3. Уровень 3: Интеллектуальное ядро (CORE BRAIN)
Функции: Агрегация, глубокая обработка, анализ данных, прогнозирование и принятие стратегических решений.
Данный уровень является «когнитивным центром» транспортной нейросети, где формируется целостное понимание состояния транспортной системы и генерируются оптимальные управленческие воздействия.
Компоненты:
Data Lake (озеро данных):
Централизованное хранилище для всех типов данных:
· Структурированные данные: показания детекторов, телематика, транзакции.
· Полуструктурированные данные: логи событий, сообщения V2X.
· Неструктурированные данные: видеозаписи, аудио, текстовые отчёты.
Принципы организации:
· Схема на чтение (schema-on-read): данные сохраняются в исходном формате, структура определяется при анализе.
· Data Governance: политики качества, линейности и жизненного цикла данных.
· Data Catalog: метаданные для обнаружения и понимания доступных наборов данных.
Цифровой двойник (Digital Twin):
Живая, синхронизированная с реальностью 4D-модель (три пространственных измерения + время) всей транспортной системы города или агломерации.
Архитектура цифрового двойника:
· Статический слой: геометрия дорожной сети, расположение инфраструктуры, топология.
· Динамический слой: текущее положение ТС, состояние светофоров, погодные условия.
· Прогнозный слой: моделируемые будущие состояния на различных горизонтах (минуты, часы, дни).
Применение:
1. Прогнозирование: Моделирование развития транспортной ситуации на часы вперёд с учётом исторических паттернов, событийного календаря, погоды.
2. Симуляция: Тестирование новых алгоритмов управления (например, новой схемы координации светофоров) в виртуальной среде перед развёртыванием в реальности.
3. Обучение ИИ: Генерация синтетических данных для редких и опасных сценариев (ДТП, экстремальные погодные условия), которые невозможно или неэтично воспроизводить в реальности.
4. Анализ «что если» (What-If Analysis): Оценка влияния инфраструктурных изменений (новая развязка, изменение схемы движения) до их физической реализации.
Ядро AI/ML:
Набор моделей машинного обучения, специализированных для различных задач:
· Прогнозирование временных рядов:
· LSTM (Long Short-Term Memory) и GRU (Gated Recurrent Units) сети для прогноза транспортных потоков.
· Transformer-архитектуры для захвата долгосрочных зависимостей.
· Вероятностные модели для оценки неопределённости прогнозов.
· Анализ транспортной сети как графа:
· Графовые нейронные сети (GNN): Graph Convolutional Networks (GCN), Graph Attention Networks (GAT) для учёта топологии сети при прогнозировании.
· Спектральные методы для выявления узких мест и критических связей.
· Обучение с подкреплением:
· Deep Q-Networks (DQN), Proximal Policy Optimization (PPO), Actor-Critic методы для обучения агентов адаптивного управления.
· Multi-Agent Reinforcement Learning (MARL) для координации множества агентов (например, сети светофоров).
· Компьютерное зрение:
· Детекция и трекинг объектов в видеопотоках.
· Семантическая сегментация дорожных сцен.
· Оценка состояния дорожного покрытия.
· Распознавание аномального поведения (агрессивное вождение, неправильная парковка).
· Оптимизационные алгоритмы:
· Метаэвристики (генетические алгоритмы, имитация отжига) для задач маршрутизации.
· Линейное и целочисленное программирование для распределения ресурсов.
· Методы выпуклой оптимизации для задач управления потоками.
Механизм федеративного обучения (Federated Learning):
Для обучения моделей на распределённых данных без их централизации применяется федеративное обучение:
· Модели обучаются локально на Edge-узлах и транспортных средствах.
· В центр передаются только обновления весов моделей, а не сырые данные.
· Обеспечивается приватность данных и снижение нагрузки на каналы связи.
3.3.3.1. Архитектура взаимодействия алгоритмов в интеллектуальном ядре
Ключевой особенностью интеллектуального ядра транспортной нейросети является не изолированное применение отдельных алгоритмов, а их глубокая интеграция в единый конвейер обработки данных и принятия решений (рис. 5).

Рисунок 5 - Архитектура взаимодействия алгоритмов в интеллектуальном ядре транспортной нейросети
Уровень 1 — пространственно-временное кодирование (LSTM + GNN):
На первом этапе данные от сенсорной сети проходят через гибридный энкодер, объединяющий возможности рекуррентных и графовых нейронных сетей:
Темпоральный модуль (LSTM/GRU):
· Принимает временные ряды показателей для каждого узла сети (детектора, перекрестка, участка дороги): интенсивность движения, средняя скорость, плотность, длина очереди .
· Формирует скрытые представления (скрытые состояния), кодирующие динамику каждого узла за последние T временных шагов (обычно T = 12–48 интервалов по 5 минут).
· Выходные эмбеддинги размерности dh передаются в графовый модуль.
Пространственный модуль (GNN):
· Получает эмбеддинги от LSTM как признаки узлов графа G = (V, E), где V — множество узлов транспортной сети, E — связи между ними (дорожные сегменты).
· Применяет механизм передачи сообщений (message passing): каждый узел агрегирует информацию от соседей с учётом весов рёбер (пропускная способность, текущая загрузка).
· Используются архитектуры Graph Attention Networks (GAT), где внимание (attention) динамически определяет важность соседних узлов, или пространственно-временные графовые свёрточные сети (STGCN) для совместного моделирования пространственно-временных зависимостей.
Формализация гибридного слоя:
Темпоральное кодирование
Графовая свёртка с вниманием
где αij — коэффициенты внимания;
N(i) — соседи узла i.
Уровень 2 — прогнозирование и моделирование сценариев:
Полученные пространственно-временные представления zi используются для решения двух ключевых задач:
Краткосрочное прогнозирование (горизонт 5–60 минут):
· Декодер на основе Transformer или LSTM генерирует прогнозы состояния сети на заданный период.
· Используется многозадачное обучение: одновременное прогнозирование скорости, потока и вероятности инцидентов.
· Вероятностные модели (байесовский LSTM, глубокие ансамбли) обеспечивают оценку неопределённости прогнозов.
Подготовка среды для RL-агентов:
· Прогностические эмбеддинги формируют вектор состояния st для агентов обучения с подкреплением.
· Цифровой двойник использует прогнозы для моделирования альтернативных сценариев развития ситуации.
Уровень 3 — принятие решений (обучение с подкреплением):
Агенты RL работают в среде, сформированной предыдущими уровнями:
Иерархическая архитектура RL:
· Стратегический агент (централизованный): работает на уровне всей сети или крупных районов. Принимает решения о глобальных стратегиях: активация режима «зелёный коридор», перенаправление потоков при чрезвычайных ситуациях, координация между районами. Обучается методами PPO или SAC с редкими, но значимыми вознаграждениями.
· Тактические агенты (децентрализованные): управляют группами из 5–15 перекрёстков (координируемые коридоры). Получают указания от стратегического агента как часть состояния. Используют многоагентный RL с механизмами коммуникации между агентами.
· Оперативные агенты (локальные): Управляют отдельными светофорами или RSU. Принимают решения в реальном времени (цикл < 100 мс). Обучаются методами DQN с приоритетным воспроизведением опыта.
Интеграция прогнозов в RL:
· Вектор состояния s_t включает в себя: текущие показатели датчиков, прогнозы LSTM-GNN на несколько шагов вперёд, контекстную информацию (время суток, погоду, события).
· Награда rt формируется как взвешенная комбинация показателей: пропускная способность, среднее время ожидания, выбросы CO₂, количество остановок.
· Критик оценивает Q-функцию с учётом неопределённости прогнозов (Distributional RL).
Контуры обратной связи:
Архитектура включает в себя три основных контура обратной связи:
1. Онлайн-обучение прогнозных моделей: Ошибки прогнозирования используются для дообучения LSTM-GNN в режиме онлайн с применением методов непрерывного обучения для предотвращения катастрофического забывания.
2. Адаптация политик RL: Эффективность действий агентов оценивается по реальным результатам; политики корректируются с использованием методов вне политики.
3. Калибровка цифрового двойника: Выявляются расхождения между симуляцией и реальностью, которые используются для уточнения параметров моделей.
Пример сценария взаимодействия:
1. Сенсоры фиксируют рост интенсивности на въезде в город (утренний час пик).
2. LSTM-модули детектируют характерный паттерн и генерируют временные эмбеддинги.
3. GNN агрегирует информацию с учётом топологии: прогнозирует распространение загрузки по сети.
4. Прогнозный модуль предсказывает формирование затора на ключевой магистрали через 15 минут с вероятностью 78%.
5. Стратегический RL-агент, получив прогноз как часть состояния, активирует превентивный сценарий.
6. Тактические агенты получают директиву и координированно увеличивают длительность зелёной фазы на подходах к магистрали.
7. Оперативные агенты адаптируют локальные параметры в реальном времени.
8. Система мониторинга отслеживает результат; данные используются для обучения всех уровней.
3.3.4. Уровень 4 (рис. 4): Сервисы и приложения (SERVICES)
Функции: Преобразование аналитических возможностей ядра в практическую ценность для различных категорий пользователей через стандартизированные API.
Архитектурные принципы:
· API-first подход: все функции ядра доступны через документированные, версионируемые API.
· Микросервисная архитектура: каждый сервис — независимо развёртываемый и масштабируемый компонент.
· Event-driven architecture: асинхронное взаимодействие между сервисами через брокеры сообщений.
Категории сервисов:
G2C (Government-to-Citizen):
· Информирование о дорожной обстановке в реальном времени.
· Предупреждения о критических событиях (ДТП, ремонтные работы, погодные условия).
· Рекомендации альтернативных маршрутов.
· Сервисы безопасности: предупреждение пешеходов о приближающихся ТС, оповещение о зонах с повышенной аварийностью.
B2C (Business-to-Consumer):
· Платформы MaaS (Mobility as a Service): интегрированное планирование, бронирование и оплата мультимодальных поездок.
· Продвинутая навигация: прогностическая маршрутизация с учётом прогнозируемых заторов.
· Сервисы парковки: резервирование, навигация к месту, автоматическая оплата.
· Каршеринг и райдшеринг: оптимизация распределения транспортных средств.
B2B (Business-to-Business):
· Логистические сервисы: оптимизация маршрутов для коммерческого транспорта, управление автопарком, прогнозирование времени доставки.
· Аналитика для ритейла: данные о транспортных потоках для оценки локаций, прогнозирования спроса.
· Страховые сервисы: данные для Usage-Based Insurance (UBI), оценка рисков.
G2G (Government-to-Government):
· Межведомственное взаимодействие: обмен данными между транспортными, экологическими, градостроительными органами.
· Обеспечение приоритета спецтранспорта: автоматическое освобождение коридоров для скорой помощи, пожарных, полиции.
· Координация при ЧС: интеграция с системами управления в кризисных ситуациях.
3.3.5. Уровень 5: Пользователи и интерфейсы (STAKEHOLDERS)
Функции: Обеспечение эффективного, интуитивного и безопасного взаимодействия человека с системой.
Ключевые принципы проектирования интерфейсов:
· Человекоцентричность: интерфейсы адаптированы под задачи и контекст использования.
· Минимизация когнитивной нагрузки: особенно критично для водителей.
· Универсальный дизайн: доступность для людей с различными возможностями.
· Мультимодальность: комбинация визуальных, аудио, тактильных каналов.
Категории интерфейсов:
Для операторов ЦОДД:
· Интерактивные дашборды: визуализация состояния сети в реальном времени на цифровых картах.
· Системы поддержки принятия решений: рекомендации действий при инцидентах, симуляция последствий решений.
· Средства управления: интерфейсы для ручного вмешательства и корректировки автоматических алгоритмов.
Для граждан (водители, пассажиры, пешеходы):
· Мобильные приложения: MaaS-приложения, навигаторы, информационные сервисы.
· Бортовые HMI (Human-Machine Interface): встроенные в автомобиль дисплеи и голосовые ассистенты.
· Носимые устройства: смарт-часы, приложения для слабовидящих.
Для разработчиков и интеграторов:
· Открытые API (Open API): документированные интерфейсы для создания сторонних приложений.
· Песочницы (Sandbox): безопасные среды для тестирования и разработки.
· Стандарты данных: открытые форматы (GTFS, SIRI, DATEX II, OpenAPI) для обеспечения интероперабельности.
3.4. Сквозной компонент: Киберфизическая безопасность
Безопасность в транспортной нейросети — это не изолированный модуль, а сквозное свойство, пронизывающее все уровни архитектуры. Компрометация любого компонента может иметь катастрофические последствия — от нарушения приватности до физического ущерба.
Ландшафт угроз:
Угрозы физическому и Edge-уровню:
· GPS-спуфинг: подмена сигналов глобальной навигации для введения ТС в заблуждение относительно местоположения.
· Физическое вмешательство: повреждение или модификация датчиков, RSU, дорожных контроллеров.
· Атаки на сенсоры: ослепление камер и LiDAR, искажение радарных сигналов.
Угрозы коммуникационному уровню:
· Атаки типа «отказ в обслуживании» (DoS/DDoS): перегрузка каналов связи или вычислительных узлов.
· Sybil-атака: создание множества виртуальных «автомобилей-призраков» для искусственного формирования пробок или дезинформации .
· Man-in-the-Middle (MitM): перехват и модификация сообщений между участниками.
· Replay-атаки: повторная передача ранее перехваченных легитимных сообщений.
Угрозы транспортным средствам:
· Взлом бортовых систем через CAN-шину: получение контроля над критическими функциями (рулевое управление, тормоза).
· Компрометация OTA-обновлений (Over-The-Air): внедрение вредоносного кода через механизм обновления ПО.
· Атаки на телематические сервисы: несанкционированный доступ к данным владельца.
Угрозы интеллектуальному ядру:
· Adversarial attacks на ML-модели: целенаправленные возмущения входных данных для получения некорректных предсказаний.
· Data poisoning: внесение искажённых данных в обучающие выборки.
· Эксплуатация уязвимостей облачной инфраструктуры.
· Инсайдерские угрозы: действия злонамеренных или скомпрометированных сотрудников.
Комплексная система защиты:
Криптографическая защита:
· Инфраструктура открытых ключей (PKI) для V2X: централизованная или гибридная PKI для выпуска, управления и отзыва цифровых сертификатов .
· Криптографическое шифрование: TLS 1.3 для защиты каналов связи, IPsec для VPN-туннелей .
· Цифровые подписи: аутентификация источника и обеспечение целостности сообщений.
· Псевдонимизация: периодическая смена идентификаторов ТС для защиты приватности при сохранении возможности аутентификации.
Обнаружение и предотвращение угроз:
· Системы обнаружения вторжений (IDS) и предотвращения вторжений (IPS): развёртывание на всех уровнях архитектуры .
· Поведенческий анализ на базе ИИ: выявление аномалий в поведении ТС, паттернах трафика, сообщениях V2X.
· Системы обнаружения Sybil-атак: анализ пространственно-временной консистентности сообщений, использование коллективного «свидетельства».
· Security Operations Center (SOC): централизованный мониторинг безопасности 24/7.
Обеспечение устойчивости:
· Принцип минимальных привилегий: каждый компонент имеет только необходимые для функционирования права.
· Сегментация сети: изоляция критических подсистем.
· Резервирование и отказоустойчивость: обеспечение работоспособности при компрометации отдельных компонентов.
· Механизмы «безопасного отказа» (fail-safe): при обнаружении аномалий система переходит в безопасное состояние.
Защита данных и приватности:
· Анонимизация и псевдонимизация персональных данных.
· Технологии Privacy-Enhancing Technologies (PET): дифференциальная приватность, гомоморфное шифрование.
· Применение блокчейн-технологий: обеспечение неизменности критических данных (логи инцидентов, данные для расследования ДТП).
· Соответствие регуляторным требованиям: GDPR, ФЗ-152 «О персональных данных».
3.5. Механизмы коллективного интеллекта и самоорганизации
Ключевой отличительной чертой транспортной нейросети от предыдущих поколений ИТС является наличие механизмов коллективного интеллекта, позволяющих системе демонстрировать эмерджентное поведение — свойства, не присущие отдельным компонентам, но возникающие из их взаимодействия.
Распределённое принятие решений:
Архитектура предусматривает иерархию уровней принятия решений:
· Микроуровень (миллисекунды): автономные решения отдельных агентов (ТС, светофоры) на основе локальных данных.
· Мезоуровень (секунды — минуты): координация между соседними агентами, формирование локальных коалиций.
· Макроуровень (минуты — часы): стратегическая оптимизация на уровне районов, коридоров, всего города.
Кооперативное восприятие (Cooperative Perception):
Транспортные средства и инфраструктура обмениваются не только своим состоянием, но и данными о воспринимаемом окружении:
· Collective Perception Messages (CPM): передача информации об обнаруженных объектах.
· Extended Sensing: расширение области восприятия каждого участника за счёт данных от других.
· Collective Mapping: совместное создание и обновление высокоточных карт.
Роевой интеллект (Swarm Intelligence):
Применение принципов роевого интеллекта для самоорганизации транспортных потоков:
· Алгоритмы муравьиной колонии (ACO) для динамической маршрутизации.
· Алгоритмы роя частиц (PSO) для оптимизации параметров управления.
· Стигмергия: непрямая координация через изменения в общей среде (виртуальные «феромонные следы»).
Адаптивность и обучение:
· Постоянное обучение: модели ML постоянно дообучаются на новых данных (Online Learning, Continual Learning).
· Перенос знаний: опыт, полученный в одном районе или городе, может быть адаптирован для других (Transfer Learning).
· Эволюционная адаптация: автоматический подбор и оптимизация параметров системы в ответ на изменение условий.
3.6. Эмерджентные свойства транспортной нейросети
Интеграция описанных уровней и механизмов приводит к возникновению качественно новых свойств системы:
Предиктивность:
Переход от реактивного реагирования на события (пробка уже образовалась — принимаем меры) к проактивному управлению (предсказываем формирование пробки за 30–60 минут — принимаем превентивные меры):
· Прогнозирование инцидентов на основе предикторов (погода, время суток, паттерны поведения).
· Предсказание спроса на транспорт для оптимизации распределения ресурсов.
· Антиципативное управление светофорами на основе прогноза, а не текущего состояния.
Устойчивость (Resilience):
Способность системы сохранять функциональность при частичных отказах и внешних воздействиях:
· Graceful degradation: плавная деградация качества сервисов вместо полного отказа.
· Самовосстановление: автоматическое обнаружение и изоляция неисправных компонентов, перераспределение нагрузки.
· Адаптация к аномальным ситуациям: автоматическое переключение режимов работы при ЧС.
Справедливость и инклюзивность:
Система способна учитывать интересы различных групп пользователей и обеспечивать социально справедливое распределение транспортных благ:
· Балансировка между эффективностью и равенством доступа.
· Специальная поддержка маломобильных групп населения.
· Предотвращение «цифрового разрыва» через множественные каналы доступа.
Синергия с городскими системами:
Транспортная нейросеть не существует изолированно, но интегрируется с другими городскими системами:
· Энергосистема: координация с сетями электроснабжения для оптимизации зарядки электротранспорта.
· Системы безопасности: интеграция с системами видеонаблюдения, экстренного реагирования.
· Градостроительное планирование: данные о транспортных паттернах для обоснования решений по землепользованию.
· Экологический мониторинг: совместное управление для минимизации воздействия на окружающую среду.
4. Обсуждение
4.1. Сравнение с существующими концепциями
Предложенная модель «транспортной нейросети» является развитием и интеграцией существующих подходов.
· Internet of Vehicles (IoV): Концепция IoV в основном фокусируется на уровне коммуникаций (Уровень 2), описывая сеть подключенных автомобилей. Наша модель встраивает IoV как компонент, но добавляет критически важные уровни Edge-вычислений, интеллектуального ядра с цифровым двойником и комплексного сервисного уровня.
· Cooperative ITS (C-ITS): Эта концепция определяет протоколы и стандарты для кооперативного взаимодействия (V2X), что соответствует Уровню 2 и части Уровня 1. Однако C-ITS не постулирует наличие центрального самообучающегося ядра (Уровень 3), способного к глобальной оптимизации и прогностическому управлению.
Таким образом, «транспортная нейросеть» — это не просто сеть, а целостная система управления с контурами обратной связи, работающая на разных временных и пространственных масштабах, от миллисекундных реакций на перекрестке до долгосрочного стратегического планирования.
4.2. Глубокий анализ барьеров и вызовов
Можно выделить 4 направления барьеров и вызовов при реализации ИТС (рис. 6).
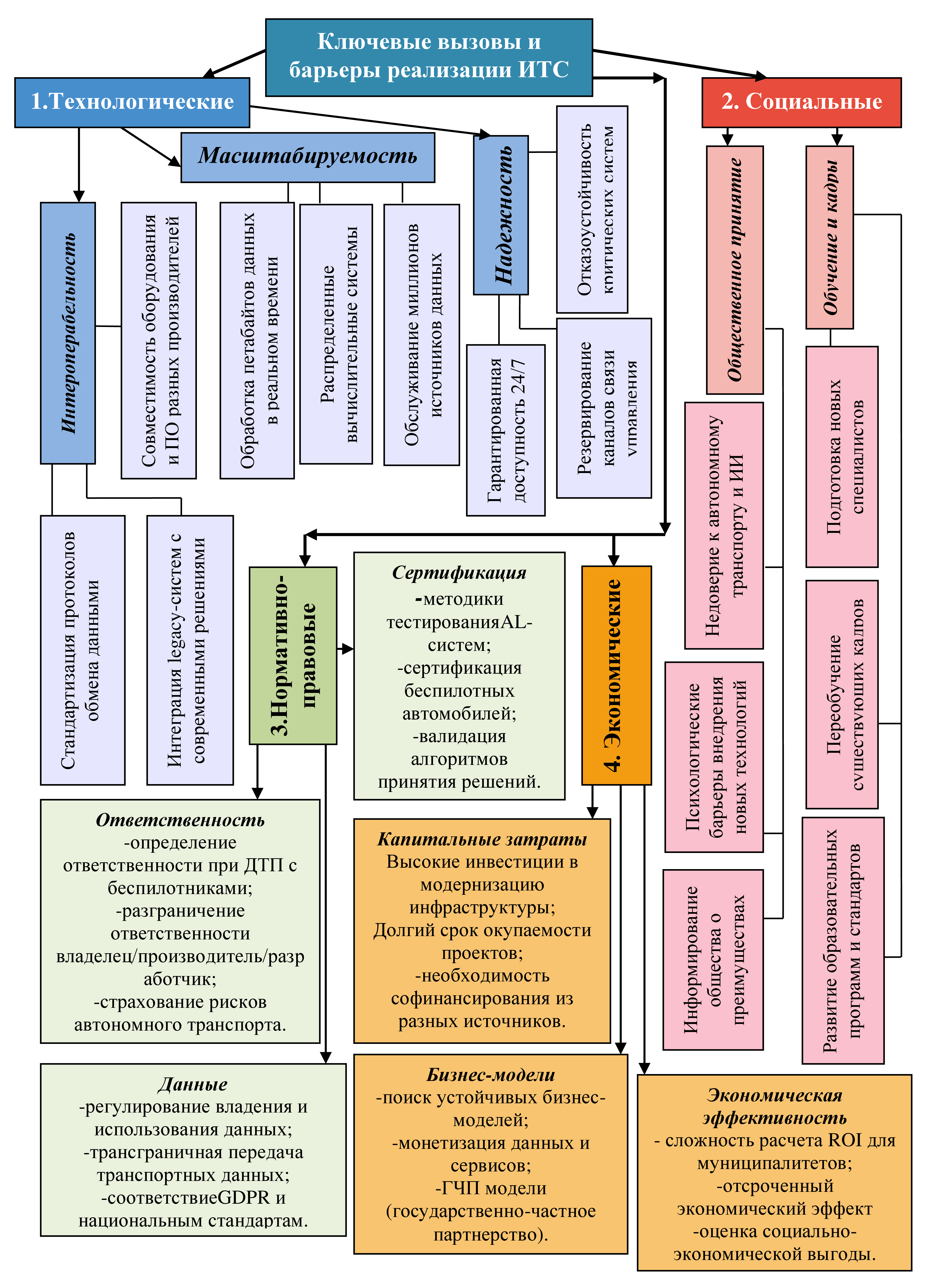
Рисунок 6 - Ключевые барьеры и вызовы реализации ИТС
4. Социальные и этические барьеры. Проблема общественного принятия технологий напрямую связана с доверием к алгоритмам принятия решений. Ключевые проблемы включают в себя: этику алгоритмического принятия решений в критических ситуациях, баланс между конфиденциальностью и безопасностью, риски цифрового неравенства и трансформацию рынка труда. Подробный анализ этих проблем и предлагаемых решений представлен в разделе 4.3.
3. Нормативно-правовые: Возникает проблема ответственности при ДТП с участием ИИ. Кто несет ответственность: владелец, производитель автомобиля, разработчик ПО, оператор сети или муниципалитет? Существующее законодательство (например, Венская конвенция о дорожном движении) не готово к L4-L5 автоматизации. Требуется разработка методик сертификации и валидации недерминированных AI-систем.
4. Экономические барьеры и модели финансирования. Масштабное развёртывание транспортной нейросети требует значительных инвестиций. По оценкам McKinsey, полная цифровизация транспортной инфраструктуры крупного мегаполиса потребует вложений в размере 3–8 млрд долларов США в течение 10–15 лет. Традиционные модели бюджетного финансирования не способны обеспечить такие объёмы, что обусловливает необходимость применения инновационных финансовых механизмов (рис. 7).

Рисунок 7 - Модели финансирования ИТС
ГЧП — это долгосрочное контрактное соглашение между государственным органом и частным сектором, при котором частный партнёр берёт на себя существенные риски и управленческую ответственность, а вознаграждение зависит от результатов.
Применимые модели ГЧП для ИТС:
· DBFOM (проектирование-строительство-финансирование-эксплуатация-техническое обслуживание): частный партнёр проектирует, строит, финансирует, эксплуатирует и обслуживает инфраструктуру интеллектуальных транспортных систем в течение концессионного периода (обычно 15–30 лет). Применимо к комплексным проектам: системам электронного сбора платы, интегрированным центрам управления дорожным движением.
· Концессия с платой за доступность (Availability Payment): государство выплачивает частному оператору регулярное вознаграждение, привязанное к KPI (доступность системы, время отклика, достижение целевых показателей безопасности). Снижает риски для частного сектора, стимулирует повышение качества услуг.
· Модель совместного предприятия (Joint Venture): создание совместной компании государства и частных инвесторов для развития MaaS-платформ или сервисов обработки данных. Позволяет разделить как риски, так и будущие доходы.
Кейс: Сингапур — электронное регулирование дорожного движения (ERP) и ONE.MOTORING:
Сингапур является мировым лидером в применении ГЧП для ИТС. Система ERP, запущенная в 1998 году и модернизируемая до ERP 2.0 (на базе GNSS), реализована через ГЧП между Land Transport Authority (LTA) и консорциумом частных компаний .
Ключевые элементы модели:
· Частный консорциум отвечает за разработку, производство бортовых устройств (OBU), развёртывание и эксплуатацию системы.
· LTA устанавливает тарифную политику и использует доходы для развития общественного транспорта.
· Контракт включает SLA (соглашение об уровне обслуживания) с жёсткими требованиями к доступности (>99,9%) и точности обнаружения (>99,5%).
· Инвестиции в ERP 2.0 составляют около 556 млн сингапурских долларов, значительная часть которых финансируется за счёт государственно-частного партнёрства.
Результаты: снижение загруженности дорог в ценовых зонах на 13–15%, увеличение средней скорости на 20%, перераспределение поездок в пользу общественного транспорта.
Модель Value Capture (извлечение прироста стоимости):
Value Capture — это механизм, позволяющий государству «захватывать» часть прироста стоимости недвижимости и земли, возникающего благодаря государственным инвестициям в транспортную инфраструктуру. Логика модели такова: если строительство новой станции метро или внедрение интеллектуальных транспортных систем повышает привлекательность района и, соответственно, стоимость недвижимости, то справедливо направить часть этого прироста на финансирование самой инфраструктуры.
Инструменты Value Capture:
· Налоговое стимулирующее финансирование (НШФ): создание специального налогового округа вокруг объекта ИТС. Прирост налоговых поступлений (сверх базового уровня) в течение определённого периода направляется на покрытие затрат на инфраструктуру.
· Особые оценочные районы (ООР): Целевой сбор с собственников недвижимости, получающих прямую выгоду от проекта (например, владельцев парковок вблизи системы динамической навигации).
· Плата за развитие / плата за воздействие: Обязательные платежи застройщиков при получении разрешений на строительство в зоне влияния интеллектуальных транспортных систем.
· Совместное развитие: Государство предоставляет право на застройку территорий вблизи транспортных узлов в обмен на финансирование застройщиком компонентов интеллектуальных транспортных систем.
Кейс: Гонконгская корпорация MTR
Хотя пример относится к рельсовому транспорту, модель применима и к интеллектуальным транспортным системам. Корпорация MTR финансирует до 60 % капитальных затрат за счёт развития недвижимости над станциями и вокруг них. Интеграция с интеллектуальными транспортными системами (информационные системы, MaaS) повышает привлекательность объектов и увеличивает добавленную стоимость.
Модели монетизации данных и сервисов:
Транспортная нейросеть генерирует значительные объёмы ценных данных, которые могут стать источником стабильного дохода:
· B2B-сервисы: Продажа аналитики логистическим компаниям, страховщикам (данные для UBI), ритейлерам (анализ потоков для выбора локаций).
· Подписные модели для MaaS: Ежемесячная плата за доступ к интегрированным транспортным сервисам.
· Freemium-модели: Базовые сервисы бесплатны, расширенные (прогнозная маршрутизация, резервирование) — платные.
Кейс: Хельсинки — прихоть и национальная стратегия MaaS:
Финляндия стала первой страной, законодательно закрепившей принципы MaaS (Закон о транспортных услугах, 2018). Платформа Whim, разработанная компанией MaaS Global, объединяет общественный транспорт, такси, каршеринг, велопрокат и даже аренду автомобилей в одном приложении.
Экономическая модель:
· Подписочные планы: от базового (€49,90/мес — безлимитный общественный транспорт + скидки) до премиального (€499/мес — включая такси и аренду авто).
· Город Helsinki не субсидирует Whim напрямую, но обеспечивает открытый доступ к данным и API транспортных операторов (обязательство по закону).
· Экосистемный эффект: транспортные операторы получают новых клиентов через платформу, делясь частью выручки с агрегатором.
· К 2023 году Whim обработал более 50 млн поездок, доля мультимодальных поездок в Хельсинки выросла до 28%.
Ключевые факторы успеха:
· Законодательная поддержка (обязательное раскрытие API транспортных операторов).
· Доверие пользователей благодаря прозрачному ценообразованию.
· Интеграция с городской стратегией устойчивой мобильности.
Комбинированные модели финансирования:
На практике наиболее эффективными оказываются гибридные модели, сочетающие в себе несколько механизмов (табл. 1).
Таблица 1 - Модели финансирования ИТС
Компонент ИТС | Основной механизм | Дополнительные источники |
Сенсорная инфраструктура | Бюджет + TIF | Обязательства застройщиков |
Коммуникационная сеть | ГЧП (DBFOM) | Аренда мощностей для 5G-операторов |
Интеллектуальное ядро | Бюджет + ГЧП | Монетизация данных (B2B) |
MaaS-платформа | Частные инвестиции | Подписки, транзакции |
Кибербезопасность | Бюджет | Страховые механизмы |
4.3. Этические аспекты и предлагаемые решения
Внедрение транспортной нейросети с элементами автономного принятия решений порождает комплекс этических проблем, требующих не только философского осмысления, но и практических решений на уровне алгоритмов, нормативного регулирования и общественного консенсуса.
Проблема алгоритмической этики в критических ситуациях («проблема вагонетки»):
Классическая «проблема вагонетки» в контексте автономных транспортных средств (АТС) формулируется следующим образом: как должен действовать алгоритм в ситуации неизбежного ДТП, когда любой выбор приводит к ущербу — например, при выборе между наездом на группу пешеходов и манёвром, угрожающим жизни пассажиров (рис. 8)?

Рисунок 8 - Этическая дилемма автономного транспорта
1. Деонтологический подход (правила и запреты):
· Принцип: алгоритм никогда не должен активно причинять вред (запрет на «направленные» действия против кого-либо).
· Реализация: АТС не может совершать манёвр, целенаправленно подвергая риску конкретного участника, даже если это минимизирует общий ущерб.
· Ограничение: в долгосрочной перспективе может привести к статистически большему числу жертв.
2. Утилитарный подход (минимизация вреда):
· Принцип: выбор действия, минимизирующего совокупный ожидаемый ущерб.
· Реализация: алгоритм оценивает вероятность и тяжесть последствий каждого варианта и выбирает оптимальный.
· Ограничение: этически проблематичен, так как допускает «жертвование» меньшинством ради большинства; возникает вопрос о метрике ценности жизни.
3. Контрактный подход (общественный договор):
· Принцип: правила поведения АТС определяются демократическим путём как результат общественного договора.
· Реализация: проведение широких общественных консультаций, опросов, совещательных форумов для выработки принципов.
· Пример: проект MIT Moral Machine (более 40 млн ответов из 233 стран) выявил культурные различия в этических предпочтениях, что подчёркивает необходимость локализации этических рамок .
Предлагаемые практические решения:
Решение 1: принятие Этического кодекса для автономных транспортных систем
По образцу Этических правил автоматизированного и подключённого вождения, разработанных Этической комиссией Федерального министерства транспорта Германии (2017), предлагается принять аналогичный документ на национальном и международном уровнях.
Ключевые принципы немецкого законодательства, рекомендуемые к адаптации:
1. Защита человеческой жизни имеет приоритет над всеми остальными соображениями (имущество, животные, другие транспортные средства).
2. В ситуации неизбежного ущерба запрещена любая дискриминация по личным характеристикам (возраст, пол, физическое состояние).
3. Алгоритм не должен принимать решения на основе сравнительной «ценности» человеческих жизней.
4. Допустимо учитывать только количество потенциальных жертв, но не их характеристики.
5. Любая авария с участием транспортного средства подлежит полному документированию для последующего анализа.
Решение 2: Архитектура «этического уровня» в системе принятия решений
Предлагается интегрировать в архитектуру АТС и транспортной нейросети отдельный «этический слой» (Ethics Layer), который будет выступать в качестве ограничителя для модуля принятия решений:
[Восприятие] → [Прогнозирование] → [Генерация траекторий] → [ЭТИЧЕСКИЙ ФИЛЬТР] → [Исполнение]
Функции этического слоя:
· Проверка сгенерированных траекторий на соответствие этическому кодексу.
· Отсев вариантов, нарушающих абсолютные запреты (целенаправленный наезд на пешехода).
· Ранжирование допустимых вариантов по этическим критериям.
· Логирование всех решений и их обоснований для аудита.
Техническая реализация:
· Формализация этических правил в виде логических ограничений (constraints).
· Использование верифицируемых алгоритмов (формальных методов) для обеспечения соблюдения ограничений.
· Применение обратного обучения с подкреплением для извлечения «неявных» этических предпочтений из данных о решениях экспертов-водителей.
Решение 3: смещение фокуса с дилеммы на предотвращение
Крайне важно понимать, что «проблема вагонетки» — это пограничный случай. Главная этическая задача — спроектировать систему, которая минимизирует вероятность возникновения подобных ситуаций:
Меры по предотвращению:
· Безопасная скорость: транспортные средства должны двигаться со скоростью, позволяющей остановиться в пределах видимой безопасной зоны.
· Превентивное маневрирование: заблаговременное изменение траектории при обнаружении потенциального конфликта.
· Совместное восприятие: использование данных V2X для обнаружения скрытых объектов (пешеход за автобусом).
· Безопасные зоны: инфраструктурное обеспечение «зон отчуждения» для аварийных маневров.
Решение 4: Механизмы обеспечения прозрачности и подотчётности
Объяснимый ИИ (XAI) для транспортных решений:
· Требование к алгоритмам: возможность объяснить принятое решение на уровне, понятном неспециалисту.
· Генерация отчётов: «АТС снизила скорость, так как с вероятностью 73 % обнаружила ребёнка на границе проезжей части».
· Интерактивные интерфейсы: возможность для регулирующих органов и исследователей анализировать решения системы.
Институциональные механизмы:
· Создание независимых комиссий по этике АТС при транспортных ведомствах.
· Обязательный этический аудит алгоритмов перед сертификацией.
· «Чёрные ящики» с защитой от модификации для записи данных перед инцидентами.
Распределение ответственности:
Предлагается многоуровневая модель ответственности (рис. 2):
Таблица 2 - Многоуровневая модель ответственности за действия АТС
Уровень | Субъект | Ответственность |
Разработка | Производитель АТС / разработчик ПО | Соответствие алгоритмов сертифицированным этическим стандартам |
Эксплуатация | Оператор / владелец | Надлежащее обслуживание, своевременные обновления |
Регулирование | Государство | Установление стандартов, сертификация, надзор |
Инфраструктура | Оператор ИТС | Корректность данных V2X, инфраструктурных сигналов |
В случае инцидента проводится расследование, чтобы определить, на каком уровне произошёл сбой.
Решение 5: Общественный диалог и демократическая легитимация
Учитывая культурную специфику этических предпочтений (выявленную в рамках проекта Moral Machine), необходима легитимация этических принципов посредством общественного диалога:
Рекомендуемые механизмы:
· Проведение национальных «гражданских собраний» по вопросам этики АТС по образцу климатических ассамблей.
· Публичные консультации при разработке этического кодекса.
· Включение представителей общественности в состав комиссий по этике.
· Периодический пересмотр правил с учётом накопленного опыта и изменения общественных установок.
Дополнительные этические проблемы:
Баланс конфиденциальности и безопасности:
Транспортная нейросеть по определению собирает большие объёмы данных о перемещениях граждан. Предлагаемые решения:
· Принцип минимизации данных: сбор только необходимого объёма данных.
· Конфиденциальность по умолчанию: встроенная защита конфиденциальности в архитектуре.
· Федеративное обучение: обработка данных на устройствах без передачи в центр.
· k-анонимность и дифференциальная конфиденциальность для агрегированных данных.
· Прозрачная политика использования данных с согласия субъектов.
Предотвращение цифрового неравенства:
Риск: сервисы транспортной нейросети могут быть недоступны для социально уязвимых групп. Решения:
· Обязательное сохранение нецифровых каналов доступа к транспорту.
· Субсидирование доступа к MaaS для малообеспеченных граждан.
· Универсальный дизайн интерфейсов (доступность для людей с ограниченными возможностями).
· Программы повышения цифровой грамотности для старшего поколения.
Влияние на рынок труда:
Автоматизация транспорта угрожает занятости миллионов водителей. Решения:
· Поэтапное внедрение с длительными переходными периодами.
· Государственные программы переподготовки.
· Создание новых рабочих мест в сфере обслуживания и мониторинга АТС.
· Рассмотрение механизмов перераспределения экономических выгод (налоги на автоматизацию, базовый доход).
5. Заключение
В ходе исследования была решена научная задача по разработке и теоретическому обоснованию концептуальной модели «единой транспортной нейросети», которая определяет следующий этап эволюции ИТС. Представленная пятиуровневая архитектура, объединяющая Edge-вычисления, гибридные сети, интеллектуальное ядро с цифровым двойником, сервисы и сквозную кибербезопасность, является комплексным ответом на транспортные вызовы XXI века.
Основной вывод работы заключается в том, что будущий прорыв в решении транспортных проблем лежит не в плоскости отдельных технологий, а в их синергетической интеграции в единую, самообучающуюся и прогностическую систему управления. Данный подход визуализирован на рис. 9, представляющем комплексную модель реализации концепции.
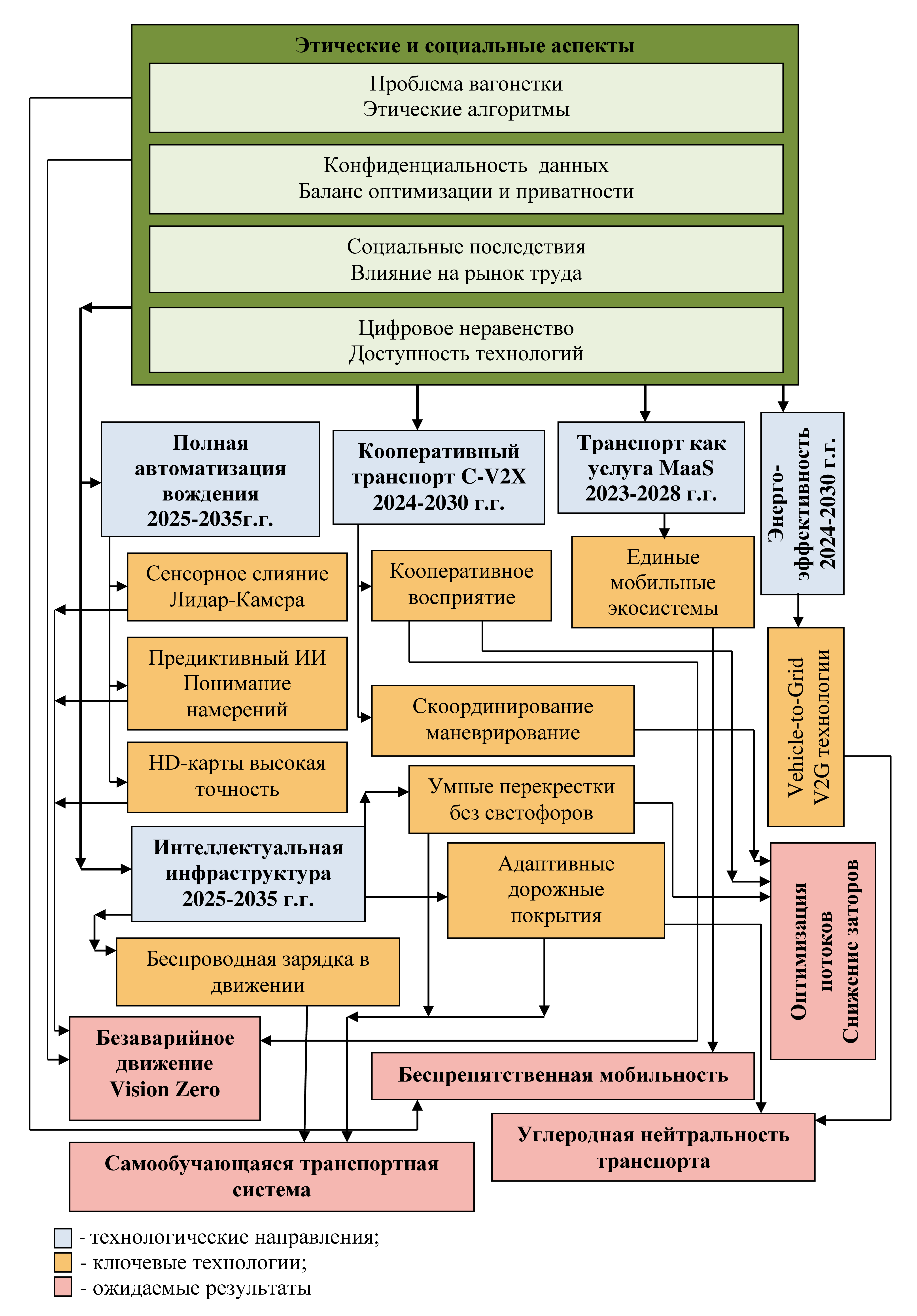
Рисунок 9 - Перспективы и направления развития ИТС
Примечание: до 2035 года
Фундаментом системы выступают ключевые технологии (сенсорное слияние, предиктивный ИИ, V2G, умные перекрестки без светофоров), совокупное применение которых приводит к достижению ожидаемых результатов:
· реализации стратегии Vision Zero (безаварийное движение);
· достижению углеродной нейтральности транспорта;
· обеспечению беспрепятственной мобильности;
· созданию полностью самообучающейся транспортной системы.
Реализация данной концепции позволит перейти от реактивного устранения последствий (пробок, ДТП) к проактивному, предсказательному менеджменту транспортной системы в масштабах города и агломерации.
Перспективы для дальнейших исследований лежат в следующих областях:
· Разработка математических моделей и алгоритмов для интеллектуального ядра, в частности, гибридных моделей, сочетающих методы машинного обучения и классической транспортной теории.
· Создание методологии оценки и верификации безопасности самообучающихся систем в критически важных приложениях.
· Разработка метрик для оценки «интеллекта» и уровня адаптивности транспортной системы в целом.
· Технико-экономическое моделирование поэтапного внедрения компонентов «транспортной нейросети» в различных типах городов.