Rus
Eng
Наши журналы
Опубликовать статью
Вход и регистрация
О журнале
Архив
Контакты
Расширенный поиск
Вернуться к статье
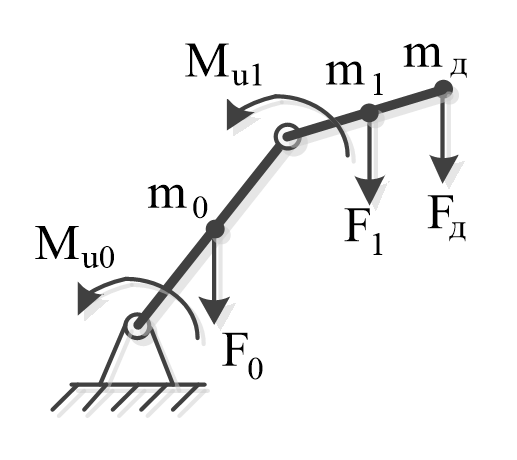
Идентификация n-звенных робототехнических манипуляторов
Рисунок 1 - Второй исследуемый объект
DOI: 10.23670/IRJ.2024.139.166.2