БИОНИЧЕСКИЕ ПРОТЕЗЫ ВЕРХНИХ КОНЕЧНОСТЕЙ: СРАВНИТЕЛЬНЫЙ АНАЛИЗ И ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ

БИОНИЧЕСКИЕ ПРОТЕЗЫ ВЕРХНИХ КОНЕЧНОСТЕЙ: СРАВНИТЕЛЬНЫЙ АНАЛИЗ И ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ
Научная статья
Уразбахтина Ю.О.1, Камалова К.Р.2, *, Морозова Е.С.3
1 ORCID: 0000-0001-7715-302X;
2 ORCID: 0000-0001-8016-6577;
3 ORCID: 0000-0001-5810-5671;
1, 2, 3 Уфимский государственный авиационный технический университет, Уфа, Россия
* Корреспондирующий автор (kamilla.kamalova.98[at]mail.ru)
АннотацияУже сегодня есть возможность протезирования верхних конечностей и отдельных ее частей. Наиболее часто встречающееся решение в России – косметические и тяговые протезы. Они не восполняют все возможности утраченной конечности, т.к. являются средствами, оснащенными наиболее важным функционалом, например, способность взять ручку в руку, писать текст, играть в теннис, ощущать сопротивление объекта при сжатии. Существуют также протезы, оснащенные различными электронными новшествами, позволяющие не только контролировать прилагаемую силу, как это происходит в активных механических протезах, но и чувствовать тепло, давление и многое другое. Данная статья содержит в себе классификации по различным параметрам протезов руки.
Ключевые слова: бионические протезы, протезы рук, система управления протезом руки.
BIONIC UPPER LIMB PROSTHESES: COMPARATIVE ANALYSIS AND PROSPECTS OF USE
Research article
Urazbakhtina Yu.O.1, Kamalova K.R.2, *, Morozova E.S.3
1 ORCID: 0000-0001-7715-302X;
2 ORCID: 0000-0001-8016-6577;
3 ORCID: 0000-0001-5810-5671;
1, 2, 3 Ufa State Aviation Technical University, Ufa, Russia
* Corresponding author (kamilla.kamalova.98[at]mail.ru)
AbstractToday, there is already a possibility of prosthetic care of the upper limbs and its individual parts. In Russia, the most common solution is cosmetic and traction prostheses. They do not make up for all the possibilities of the lost limb, possessing only the most essential functionality, for example, the ability to take a pen in hand, write text, play tennis, feel the resistance of an object when compressed. There are also prostheses with various electronic features that allow not only to control the applied force, as it happens in active mechanical prostheses, but also to feel heat, pressure and much more. This article contains classifications for various parameters of prosthetic hands.
Keywords: bionic prostheses, prosthetic arms, prosthetic arm control system.
На данный момент самым старейшим протезом является модель, изготовленная из дерева, скрепленного ниткой из кожи, еще в Древнем Египте, ее функция – ощущение «целостности» у пострадавшего [1]. На сегодня можно выделить несколько фирм, изготавливающих устройства, играющие косметическую роль: Novea, Scoliologic и т.д.
Достоинства и недостатки косметических протезов: привлекательный внешний вид (существуют модели, проектируемые под конкретного пациента, достигающие невероятного сходства с оригиналом как по внешнему виду, так и по тактильным ощущениям); сниженное значение массы из-за отсутствия каких-либо технических нагрузок; простота в изготовление и эксплуатации (не нужно заботиться об аккумуляторе); не требует больших денежных затрат на техническое обслуживание, отсутствие активного захвата, а также ощущений давления от предмета, помещаемого в протез; ограниченная функциональность, высокая цена на персональные силиконовые оболочки.
Тяговой протез имеет узкий спектр функций, которые помогают человеку выполнять основные задачи, например, взять в руку куриное яйцо и не разбить его. Механический протез позволяет удержать предмет в руке, что дает возможность выполнять некоторую «тонкую» работу.
На сегодня можно выделить несколько производителей данных моделей, а именно open source на площадках e-nable, open bionics и robohand, детский протез с возможностью дополненной реальности «Киби» от компании «Моторика», протез BeBionic - кисть от Touch Bionics, Vincent Systems и т.д.
Достоинства и недостатки тяговых протезов: надежная конструкция; небольшие массогабаритные параметры; приемлемая цена (возможность получения протеза за счет финансирования гос. стуктурами); дешевое техническое обслуживание; устойчивость к влаге, небольшим скачкам температуры; отсутствие задержки реакции, которую дает любое электронное устройство; простота в уходе; ограниченная сила захвата, обусловленная возможностью конструкции; ограничения в степенях свободы движения; система тяг может быть некомфортной и ограничивать движения.
Еще одним видом протезов, помогающих человеку восстановить некоторые функции утраченной конечности, является бионическая модель, содержащая в себе микропроцессор и всю остальную сопутствующую техническую начинку.
В данном разделе возможно выделить несколько видов протезов, различных друг от друга по регистрации входного сигнала от пользователя, представленная также на рисунке 3:
- Протез, копирующий движения целой конечности, что позволяет повысить естественность движений и отладить скорость реакции. Копирование происходит с помощью исследований ЭМГ, позволяющих определить зависимость уровня возбуждения в мышцах и реакции неповрежденной руки [2].
- Нейропротез, в основе которого лежит интеграция нероинтерфейса и протезирования, принимая во внимание необходимость инвазивной установки датчиков на конечности и множество процедур исследований пациента и регистраций активности мозговой деятельности [3]. На данный момент ведутся активные разработки командой GalvaniBionix из МФТИ.
- Миоэлектрические протезы, в которых однозначными плюсами являются: сила захвата, повышенный комфорт и свобода движений, возможность выполнить несколько жестов, внешний вид модельного ряда. Протезы используют сигналы электромиограммы (ЭМГ) (электрические сигналы, генерируемые во время сокращения мышц) от остаточных мышц конечностей для управления моторизованными суставами рук [4]. Примерами могут стать OPRA Osseointegration, DARPA MPL, LifeHand 2, некоторые виды разработанных моделей Российской компанией «Моторика».
Перейдя к разновидностям протезов, следует отметить, что описанный вариант в [5] является одним из возможных реализаций механических протезом с использованием следящего сервопривода. Ссылаясь на уже указанный источник, отметим, что на данный момент управление протезами происходит поочередно.
Приведем пример возможных способов управления в зависимости от степени поражения конечности в таблице 1.
Таблица 1 – Возможные способы управления
| Уровень поражения верхней конечности | Предназначение протеза | Возможный вариант метода управления |
| Кисть и пальцы | Захват и удержание объектов с определенной силой | Системы с обратной связью и адаптивное регулирование |
| Предплечье | Перемещение объектов в разные места с возможностью коррекции действий | Алгоритмы самообучения, нейронные сети, интеграция с нейроинтерфейсом |
| Плечо | Различные манипуляции | Инвазивные и интуитивные методы управления |
Использование обратной связи (пример с замкнутой системой) подразумевает анализ входных параметров, которые претерпели изменения после прохождения сигнала через систему управления. На данный момент существуют различные технические реализации обратной связи, например, Extended physiological proprioception (EPP) – идея взаимодействия человека и окружающего мира через протез с использованием фантомной боли, появляющейся при утрате конечности, о которой говорил Д. Симпсоном в 1972 году (расширенная физиологическая проприорицепция).
Неадаптивное регулирование, рассмотренное в [7] использует тактильное зондирование и ультразвуковую визуализацю, которые были протестированы на нескольких добровольцах, ощутивших разницу в производительности и точности захвата. Данный метод управления имеет недостаток в отсутствие возможности коррекции силы схвата и предугадывание параметров раскрытия кисти под конкретный объект.
На данный момент управление протезом чаще всего реализуется с помощью миоэлекрического контроля с внешним питанием ввиду простоты реализации и неинвазивности [8]. Возможной реализацией нейронной сети или интеграции протеза с нейроинтерфейсом является анализ остаточных движений конечности и управление системой по уже заложенным функциям верхних конечностей. Другой вариант – скоординированное совместное действие, в котором процесс происходит интуитивно, а внимание пользователя направлено на действие руки [9].
Помимо проблем, связанных с несоответствием технических характеристик, заявленных производителем, фактическим параметрам, существует еще 4 фактора [10], нарушающих нормальную работу технического устройства:
- фактор положения конечности, когда активность мышц, поддерживающее нужное положение конечности в пространстве при воздействии гравитационных сил неодинаково в статическом и динамическом состояниях;
- коэффициент интенсивности сокращения. Так как класс самообучающихся методов управления ориентирован в первую очередь на «интуитивный» сигнал, подающийся оператором, подсознательно регулирующий силу сокращения, то отклонения в данных на входе (при разных нагрузках, но одинаковом действии) приводят к искажению ожидаемых паттернов;
- коэффициент сдвига электрода относительно других, приводящий к искажению сигналов от мышцы;
- прецизионные элементы и чувствительные датчики, при снятии и надевание в составе протеза которых также происходит образование шумов и погрешностей
Принцип распознавания образов, схематично описанный на рисунке 1:
- Получение данных. Как правило, в момент подсказок, предлагаемых управляющим протоколом, мышечные паттерны от пользователя записываются в биполярные электроды. Количество электродов, необходимых конкретному пользователю определяется классом движения; место расположение обычно находится с помощью пальпации, окружного размещения или сетчатого вокруг предплечья. Сбор данных чаще всего происходит один раз в момент обучения;
- Набор данных. Анализ проводится с использованием предварительно записанных наборов данных, которые были получены от здоровых людей;
- Предварительная обработка данных. В данном разделе мы увеличиваем коэффициент полезный сигнал/шум (SNR) для улучшения отличительных характеристик ЭМГ-сигнала (который чаще всего приблизительно равен ± 5 мВ);
- Сегментация данных. Так как сигнал, получаемый с мышцы является для системы управления случайным, что нарушает общее предположение в методе извлечения. Для выявления стационарности применяется сегментирование (окна). Окна обычно создаются с помощью смежной или перекрывающейся сегментации и заключены во временной интервал приблизительно 300мс;
- Извлечение признаков. Признаки необходимы для увеличения плотности полезной информации, засчет основных свойств генеральной совокупности (всех окон), в отличие от анализа необработанной выборки. Признаками являются параметры временной области (TD), частотной области (FD) и частотно-временное представление (TFR);
- Уменьшение размерности. Само наличие функций миоэлектрического контроля требуют: включение признаков, обладающих высококлассной дискриминационной информацией, исключение признаков, схожих в большой степени друг с другом, и минимизация числа включенных признаков для борьбы с «проклятием размерности»;
- Классификация - это процесс назначения класса неизвестного наблюдения с помощью прогностической модели, обученной на более ранних наблюдениях. Классификаторы делятся на 3 вида: параметрические, непараметрические, классификаторы глубокого обучения;
- Оценка эффективности работы. Оценка миоэлектрических систем может быть выполнена на этапах извлечения признаков, классификации или же во время использования обратной связи. Оценка стадии извлечения признаков количественно определяет доступные признаки.
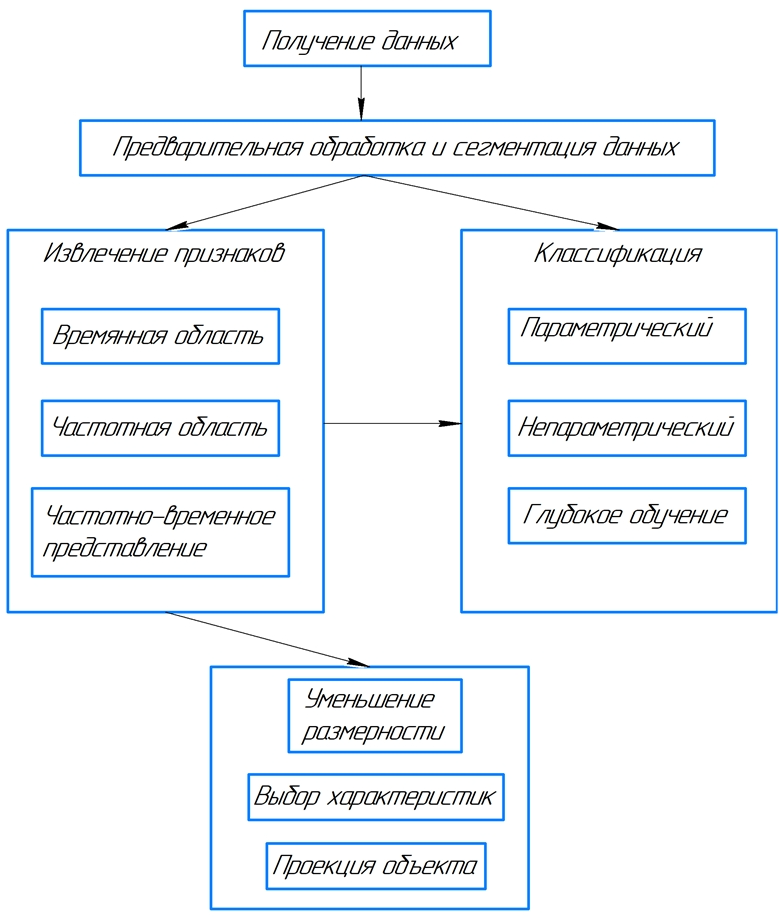
Рис. 1 – Общая структура распознавания образов ЭМГ
Необходимость инвазивных способов в управление лучше всего объяснить на конкретном примере [11]. Наиболее удачным будет локтевая дисартикуляция остаточной конечности, которая оставляет еще живой достаточный участок руки, в отличие от трансгумеральной ампутации, но ношение обычного протеза с неинвазивными датчика имеет ряд неудобств. Например, питание от тела с использованием внешней петли делает протез громоздким, он цепляется за различные предметы, в том числе и за одежду [12].
Интуитивные методы управления, пожалуй, имеют наибольшее количество плюсов, относительно всего вышесказанного. Оператору не нужно долго приспосабливаться к бионическому протезу, так как интеллектуальная система направлена на обучение, отсутствуют датчики, которые нужно прикреплять к руке и переживать об их смещение, погрешности, создаваемой усталостью мышц, потом и т.д.
Перечисленные методы являются не единственными решениями реализации управления верхними частями тела.
Возможный вариант расположение электрического устройства для снятия мышечной активности приведены на рисунке 24, где Биц. 1, 2 – электроды, расположенные на уровне Бицепса, Дел. 1, 2 – электроды дельтовидной мышцы, Триц. 1, 2 – электроды для трицепса, Груд. – электроды, расположенные на уровне большой грудной мышцы, Больш. – электроды на большую круглую мышцу [13].
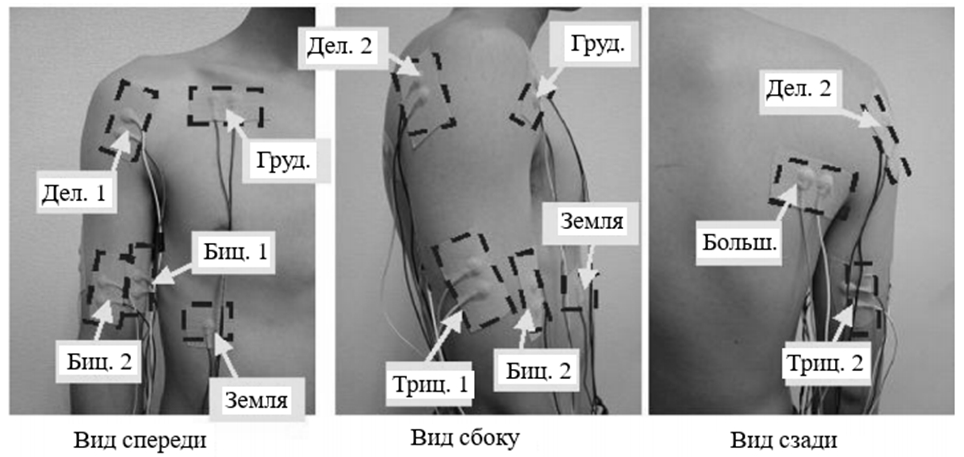
Рис. 2 – Варианты расположение ЭМГ-датчиков
Далее в таблице 6 приведены некоторые характеристики протезов различных производителей.Таблица 2 – Сравнительная таблица параметров протезов
| Наименование характеристики | BeBionic 3 [14] | i-Limb [15] | Michelangelo [16] |
| Страна и фирма-изготовитель | английская компания SRLStepper | шотландская компания Touch Bionics | немецкая компания Otto Bock |
| Минимальная стоимость в РФ, руб | 2 250 150 | 4 500 300 | 1 500 100 |
| Обратная связь | введение принудительного согласования звеньев плоского двузвеника с исполнительным устройством | отсутствует | Отсутствует |
| Количество степеней свободы | 6 | 6 | 5 |
| Наличие производства в РФ | отсутствует | отсутствует | Отсутствует |
| Наличие службы поддержки | присутствует | отсутствует | Присутствует |
| Срок изготовления, мес. | 1 | 1 | 1 |
| Наличие сенсоров | отсутствует | отсутствует | Отсутствует |
| Марка электродов | ELEC60 | PL091127 | 4X500 |
| Марка портативного блока питания | B22606 | PL000234 | 757B500 |
| Технические параметры питающих устройств (пример) | Аккумулятор 520мАч ч с зарядным портом постоянного тока | Аккумулятор 2000мАч с зарядным портом постоянного тока и заглушкой | Аккумулятор 1500мАч с зарядным портом постоянного тока |
| Масса, не более, грамм | 520 | 516 | 520 |
Недостатками известных устройств, выделяемые некоторыми разработчиками [17], [18], [19], являются:
- отсутствие разделения пальцев протеза кисти на соединенные между собой фаланги, что снижает естественность выполнения процедуры сгибания пальцев и функциональные возможности использования протеза;
- отсутствие отдельного привода пятого пальца протеза кисти, что снижает функциональные возможности использования протеза;
- применение ограничения тока нагрузки двигателей для самоустановки пальцев при схвате объекта сложной формы, что приводит к выполнению схвата объекта с максимальным усилием, определяемым создаваемым при блокировке валов двигателей моментом силы и не позволяет оператору протеза выполнять схват хрупких или легко деформирующихся предметов;
- отсутствие микропроцессорного управления, что ограничивает функциональные возможности протеза кисти одним видом схвата, не позволяет управлять сгибанием отдельных пальцев независимо друг от друга и выполнять гибкую настройку параметров функционирования протеза;
- информация о положении или начале перемещения пальцев передается точечно в форме вибрационных сигналов двумя вибродатчиками по одному для каждого действия и не может дать инвалиду-оператору представления о взаимном позиционном расположении пальцев кисти относительно друг друга;
- ход активаторов ограничен величиной хода подвижного звена потенциометра поступательного типа
- движение вращения приемной гильзы используется для выполнения функции схвата, а активные функции ротации кисти и сгибания кисти не реализуются
- в варианте протеза предплечья, который содержит искусственную кисть, несущую гильзу с элементами крепления, размещенную в ней приемную гильзу, соединенную соосно с валом механического привода и, соответственно, с возможностью вращения с ним, обеспечивая активную ротацию кисти и схват, присутствует сложность управления из-за необходимости последовательно выполнять переключения для использования функций подвижности.
На сегодня необходимо устройство, которое лишено вышеперечисленных недостатков, собранное на элементах производства России с целью создания собственного образца биоэлектрического протеза и исключению импортозависимости.
На российский рынок практически не производятся бионические протезы верхней конечности, вернее, он слабо введены в коммерческое использование из-за дороговизны.
Разработки и испытания ведут отечественных компаний, которые в скором будущем надеются запустить свою продукцию на мировой рынок.
По мнению специалистов. Существует да основных направления развития бионических протезов. Первое – это придание им чувствительности, то есть организация обратной связи, которая позволит владельцу устройства получать информацию о качествах объекта, к которому он прикасается. Второе – вживление всех элементов, включая каркас и датчик. Даже самые современные протезы необходимо снимать на время сна или принятия ванны. После того, как разработчики добились соответствия протезов оригинальным конечностям по внешнему виду и функциям, осталось сделать их постоянной частью человеческого организма, не требующей дополнительного ухода.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Камалова К. Р. Современные протезы рук / К. Р. Камалова // Мавлютовские чтения: сб. науч. тр. / Уфимск. гос. авиац. техн. ун-т. – Уфа, 2021. – т. 3. – С. 73- 79
- Fleischer C. Application of EMG signals for controlling exoskeleton robots / C. Fleischer, A. Wege, K. Kondak et al. // Biomed Tech (Berl). 2006 Dec;51(5-6):314-9
- Müller-Putz G.R. Temporal coding of brain patterns for direct limb control in humans / G.R. Müller-Putz, R. Scherer, G. Pfurtscheller et al. // Front Neurosci 2010 Jun 18;4. pii: 34.
- Kuiken T.A. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms / A. Kuiken, G. Li, B.A. Lock et al. // JAMA. 2009 Feb 11;301(6):619-28.
- Буров Г.Н. Определение требований к источникам управляющих сигналов системы управления протезом предплечья / Г.Н. Буров, В.А. Большаков // Вестник всероссийской гильдии протезистов-ортопедов. 2017. № 2 (64). с. 36–40.
- Горохова Н.М. Методы управления протезами верхних конечностей / Н.М. Горохова, М.А. Головин, М.С. Чежин // Научно-технический вестник информационных технологий, механики и оптики. 2019. Т. 19. № 2. С. 314–325. DOI: 17586/2226- 1494-2019-19-2-314-325
- Ortenzi V. Ultrasound imaging for hand prosthesis control: a comparative study of features and classification methods / V. Ortenzi et al. // Proc. 2015 IEEE Int. Conf. on Rehabilitation
- Castellini C. Proceedings of the first workshop on peripheral machine interfaces: going beyond traditional surface electromyography / C. Castellini, P. Artemiadis, M. Wininger et al. // Front. Neurorobot., vol. 8, 2014.
- Merad M. Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study / M. Merad et al. // IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. 2016. P. 5677–5682. DOI: 10.1109/IROS.2016.7759835
- Amsuess S. Self-correcting pattern recognition system of surface EMG signals for upper limb prosthesis control / Amsuess et al. // IEEE Transactions on Biomedical Engineering. 2014. V. 61. N 4. P. 1167–1176. DOI: 10.1109/TBME.2013.2296274.
- Manelle M. Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study / Manelle Merad, Étienne de Montalivet, Agnès Roby-Brami // IEEE/RSJ International Conference on Intelligent Robots and Systems, 2016, Daejeon, South Korea.
- Cheesborough J.E. Targeted Muscle Reinnervation and Advanced Prosthetic Arms / Jennifer E. Cheesborough, Lauren H. Smith, Todd A. Kuiken et al. // Semin Plast Surg. 2015 Feb. №29(1): 62–72. DOI: 10.1055/s-0035-1544166.
- Kiguchi K. Neuro-Fuzzy Control of a Robotic Exoskeleton With EMG Signals / Kazuo Kiguchi, Member, Takakazu Tanak et al. // IEEE Transactions On Fuzzy Systems. 2004. №12.
- Fleischer C. Application of EMG signals for controlling exoskeleton robots / C. Fleischer, A. Wege, K. Kondak et al. // Biomed Tech (Berl). 2006 Dec;51(5-6):314-9
- Müller-Putz G.R. Temporal coding of brain patterns for direct limb control in humans / G.R. Müller-Putz, R. Scherer, G. Pfurtscheller et al. // Front Neurosci. 2010 Jun 18;4. pii: 34.
- Патент РФ № 176303 Бионический протез кисти руки. // патент России № 176303, заявл. 05.07.2019, опубл. 07.2019 Бюл. №19
- Патент РФ № 192179 Бионическая кисть руки. // патент России № 192179, заявл. 17.10.2018, опубл. 09.2019 Бюл. № 25
- Патент РФ № 2615278 Протез предплечья. // патент России № 2615278, заявл. 25.04.2018, опубл. 04.2018 Бюл. №12
Список литературы на английском языке / References in English
- Kamalova K. R. Sovremennye protezy ruk [Modern Prosthetic Hands] / K. R. Kamalova // Mavljutovskie chtenija: sb. nauch. tr. [Mavlyutov Readings: Collection of Scientific Papers] / Ufimsk. gos. aviac. tehn. un-t. – Ufa, 2021. – Vol. 3. – 73- 79 [in Russian]
- Fleischer C. Application of EMG signals for controlling exoskeleton robots / C. Fleischer, A. Wege, K. Kondak et al. // Biomed Tech (Berl). 2006 Dec;51(5-6):314-9
- Müller-Putz G.R. Temporal coding of brain patterns for direct limb control in humans / G.R. Müller-Putz, R. Scherer, G. Pfurtscheller et al. // Front Neurosci 2010 Jun 18;4. pii: 34.
- Kuiken T.A. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms / A. Kuiken, G. Li, B.A. Lock et al. // JAMA. 2009 Feb 11;301(6):619-28.
- Burov G.N. Opredelenie trebovanij k istochnikam upravljajushhih signalov sistemy upravlenija protezom predplech'ja [Determination of Requirements for Control Signal Sources of the Forearm Prosthesis Control System] / G.N. Burov, A. Bol'shakov // Vestnik vserossijskoj gil'dii protezistov-ortopedov [All-Russian Prosthetists and Orthopaedists Guild Bulletin]. 2017. № 2 (64). pp. 36–40. [in Russian]
- Gorohova N.M. Metody upravlenija protezami verhnih konechnostej [Methods of Control of Upper Limb Prostheses] / N.M. Gorohova, M.A. Golovin, M.S. Chezhin // Nauchno-tehnicheskij vestnik informacionnyh tehnologij, mehaniki i optiki [Scientific and Technical Bulletin of Information Technologies, Mechanics and Optics]. 2019. Vol. 19. № 2. pp. 314–325. DOI: 10.17586/2226- 1494-2019-19-2-314-325 [in Russian]
- Ortenzi V. Ultrasound imaging for hand prosthesis control: a comparative study of features and classification methods / V. Ortenzi et al. // Proc. 2015 IEEE Int. Conf. on Rehabilitation
- Castellini C. Proceedings of the first workshop on peripheral machine interfaces: going beyond traditional surface electromyography / C. Castellini, P. Artemiadis, M. Wininger et al. // Front. Neurorobot., vol. 8, 2014.
- Merad M. Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study / M. Merad et al. // IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. 2016. P. 5677–5682. DOI: 10.1109/IROS.2016.7759835
- Amsuess S. Self-correcting pattern recognition system of surface EMG signals for upper limb prosthesis control / Amsuess et al. // IEEE Transactions on Biomedical Engineering. 2014. V. 61. N 4. P. 1167–1176. DOI: 10.1109/TBME.2013.2296274.
- Manelle M. Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study / Manelle Merad, Étienne de Montalivet, Agnès Roby-Brami // IEEE/RSJ International Conference on Intelligent Robots and Systems, 2016, Daejeon, South Korea.
- Cheesborough J.E. Targeted Muscle Reinnervation and Advanced Prosthetic Arms / Jennifer E. Cheesborough, Lauren H. Smith, Todd A. Kuiken et al. // Semin Plast Surg. 2015 Feb. №29(1): 62–72. DOI: 10.1055/s-0035-1544166.
- Kiguchi K. Neuro-Fuzzy Control of a Robotic Exoskeleton With EMG Signals / Kazuo Kiguchi, Member, Takakazu Tanak et al. // IEEE Transactions On Fuzzy Systems. 2004. №12.
- Fleischer C. Application of EMG signals for controlling exoskeleton robots / C. Fleischer, A. Wege, K. Kondak et al. // Biomed Tech (Berl). 2006 Dec;51(5-6):314-9
- Müller-Putz G.R. Temporal coding of brain patterns for direct limb control in humans / G.R. Müller-Putz, R. Scherer, G. Pfurtscheller et al. // Front Neurosci. 2010 Jun 18;4. pii: 34.
- Patent RF № 176303 Bionicheskij protez kisti ruki [Bionic Prosthetic Hand]. // patent of Russia № 176303, appl. 05.07.2019, publ. 05.07.2019 Bul. №19 [in Russian]
- Patent RF № 192179 Bionicheskaja kist' ruki [Bionic Hand]. // patent of Russia № 192179, appl. 17.10.2018, publ. 05.09.2019 Bul. № 25 [in Russian]
- Patent RF № 2615278 Protez predplech'ja [Prosthetic Forearm]. // patent of Russia № 2615278, appl. 25.04.2018, publ. 25.04.2018 Bul. №12 [in Russian]