РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА БУРОВОГО НАСОСА
Никулин О.В.
ORCID: 0000-0002-4288-2473, Кандидат технических наук,
ООО «Управляющая компания «Татбурнефть», г. Альметьевск
РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА БУРОВОГО НАСОСА
Аннотация
Рассмотрена система управления электроприводом постоянного тока бурового насоса. Описана функциональная схема электропривода бурового насоса, управляемого по системе тиристорный преобразователь – двигатель. Выявлены недостатки существующей системы управления, связанные с использованием контроллера и цифровой сети полевого уровня. Приведена статистика выхода из строя модулей контроллера и коммуникационных плат за 2014 – 2015 гг. Рассмотрены сигналы, передаваемые между пультом управления бурильщика и тиристорным преобразователем. Разработана система управления электроприводом бурового насоса без использования контроллера и цифровой сети.
Ключевые слова: электропривод, буровой насос, система управления
Nikulin O.V.
ORCID: 0000-0002-4288-2473, PhD in Engineering,
Management Company Tatburneft, LLC
DEVELOPMENT OF A CONTROL SYSTEM OF DC MOTOR MUD PUMP
The control system of DC electric drive drilling pump is considered. A functional diagram of the electric drive mud pump is described. Deficiencies in the existing control system associated with a controller and digital field networks are identified. The statistics of failure of the controller modules and the com-telecommunication fees for 2014 – 2015. The signals transmitted between the remote driller and the thyristor is converted into by the user are reviewed. The control system of electric drive mud pump without using the controller and the digital network is developed.
Key words: electric drive, mud pump, control system
Значительное расширение задач при бурении нефтегазовых скважин, связанных с видом скважины – наклонно-направленные, горизонтальные и со специфическими условиями бурения, повышают требования к электроприводу (ЭП). Нерегулируемый электропривод буровых насосов (БН) лишь в минимальной степени отвечает современным требованиям технологии бурения и большую часть своей работы эксплуатируется в недогруженном режиме. Регулируемый электропривод позволяет по мере углубления скважины поддерживать давление на выходе бурового насоса постоянным. При выполнении этого условия электродвигатель полнее используется по мощности, что приводит к снижению потерь мощности в электродвигателе и снижению расхода электроэнергии.
Буровые насосы снабжаются сменными поршнями и втулками ряда диаметров. Использование сменных поршней и втулок разных диаметров представляет собой по существу ступенчатое регулирование выходных параметров насоса – подачи и давления. При регулируемом электроприводе для изменения подачи и давления достаточно изменять частоту вращения электродвигателя. Использование регулируемого электропривода позволяет сократить число используемых поршней и втулок, а также оптимизировать их смену, сократить время бурения и время простоя буровой бригады, связанного со сменой поршней и втулок. При этом применение регулируемого электропривода буровых насосов обеспечивает наиболее полное использование мощности насоса, возможность реализации оптимальных режимов бурения, сокращение аварийности, повышение показателей бурения в целом.
Схема «Тиристорный преобразователь – Двигатель постоянного тока», нашедшая применение в буровых установках, показана на рисунке 1. Схема состоит из тиристорного преобразователя ТП и двигателя постоянного тока ДПТ. Тиристорным преобразователем осуществляется питание постоянным током обмотки якоря ДПТ и обмотки возбуждения ОВ [1].
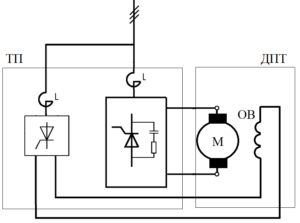
Рисунок 1 – Схема «Тиристорный преобразователь – Двигатель постоянного тока»
На современных буровых установках (БУ) с ЭП постоянного тока для БН применяется система управления (рисунок 2), построенная по принципу подчиненного управления и включает в себя контур регулирования ЭДС двигателя и подчиненный ему контур регулирования тока. Регулятор ЭДС РЭ – пропорциональный (П-регулятор), тока РТ – пропорционально-интегральный (ПИ-регулятор).
Управление ЭП осуществляется с пульта бурильщика сельсинным командоаппаратом СК. Сигнал от СК через гальваническую развязку РГ и фазочувствительный выпрямитель ФВ поступает в модуль аналогового ввода контроллера. Контроллер включает в свой состав центральный узел – модуль контроллера – и набор модулей аналогового и дискретного ввода/вывода. Связь между модулем контроллера и модулями ввода/вывода осуществляется по CAN-интерфейсу. Модуль контроллера кроме CAN-интерфейса имеет также разъем для подключения к локальной сети PROFIBUS-DP, и разъем для подключения персональной электронно-вычислительной машины (ПЭВМ), с помощью которого можно вводить обновленные и усовершенствованные версии программного обеспечения.
Контроллер предназначен для сбора дискретных и аналоговых сигналов с пульта бурильщика, обработки этих сигналов и передачи соответствующих данных по локальной сети PROFIBUS-DP в систему автоматического регулирования ТП. А также для приема данных, и вывода соответствующих аналоговых и дискретных сигналов на показывающие приборы и светосигнальную аппаратуру пульта бурильщика, включение пускателей вспомогательных приводов.
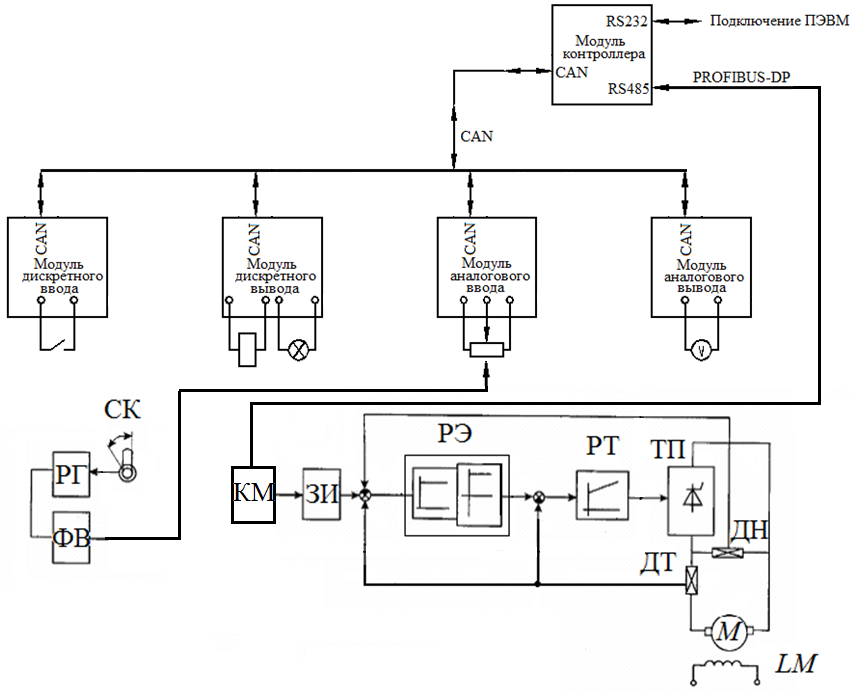
Рисунок 2 – Функциональная схема электропривода бурового насоса, управляемого по системе тиристорный преобразователь – двигатель
В состав ТП входят преобразователи постоянного тока для питания обмотки якоря и обмотки возбуждения ЭД (рисунок 1), система импульсно-фазового управления СИФУ, платы клеммных входов/выходов (аналоговых и дискретных), система автоматического управления, коммуникационные модули, панель управления, датчики тока ДТ и напряжения ДН. Обмен данными между ТП и контроллером по сети PROFIBUS-DP осуществляется посредством коммуникационного модуля КМ.
В процессе эксплуатации БН с ЭП постоянного тока выявлен частый выход из строя модулей контроллера и коммуникационных плат в ТП, что приводит к останову процесса бурения и простою буровой бригады. В таблице 1 приведены количественные данные по выходу из строя указанных компонентов системы автоматического управления (САУ) в 2014 и 2015 гг. в ООО «УК «Татбурнефть» на десять БУ типа БУ-2000/125ЭП.
Таблица 1 – Количественные данные по выходу из строя модулей контроллера и коммуникационных плат за 2014 – 2015 гг.
|
Модуль контроллера |
Модуль дискретного ввода |
Модуль дискретного вывода |
Модуль аналогового ввода |
Модуль аналогового вывода |
Коммуника- ционный модуль |
|
2014 г. |
|||||
|
3 |
10 |
7 |
16 |
8 |
4 |
|
2015 г. |
|||||
|
3 |
7 |
5 |
14 |
5 |
3 |
Из таблицы 1 видно значительное количество выходов из строя модулей. Поэтому представляет интерес разработки системы управления БН без использования модулей контроллера и коммуникационных плат.
В таблице 2 приведено описание сигналов, передаваемых между модулем контроллера (пультом бурильщика) и САУ ТП.
Для приема и вывода дискретных и аналоговых сигналов в САУ ТП в новой схеме использована плата клеммных входов/выходов (расположена непосредственно в ТП), клеммы которой программируются.
Для реализации схемы была разработана управляющая программа «Direct Control TBN» [2], функциональная схема показана на рисунке 2.
Таблица 2 – Описание сигналов, передаваемых между пультом бурильщика и САУ ТП в стандартной и новой схеме
|
Описание сигнала |
Тип сигнала в стандартной схеме |
Тип сигнала в новой схеме |
|
Включение насоса |
Телеграмма PROFIBUS-DP из САУ ТП в ПБ |
Дискретный, из ПБ в САУ ТП |
|
Задание скорости |
Дискретный, из ПБ в САУ ТП |
|
|
Обдув двигателя включен |
Дискретный, из ПБ в САУ ТП (объединены последовательно) |
|
|
Маслонасос включен |
||
|
Насос охлаждения штоков включен |
||
|
Датчик кожуха замкнут |
Дискретный, из ПБ в САУ ТП (объединены последовательно) |
|
|
Превышение давления в манифольде |
||
|
Работоспособность пульта бурильщика |
Исключен |
|
|
ТП готов |
Телеграмма PROFIBUS-DP из ПБ в САУ ТП |
Дискретный, из САУ ТП в ПБ (объединены последовательно) |
|
Управление разрешено |
||
|
Превышение давления |
Дискретный, из САУ ТП в ПБ (объединены последовательно) |
|
|
Снят кожух |
||
|
Обдув двигателя включен |
Дискретный, из САУ ТП в ПБ (объединены последовательно) |
|
|
Маслонасос включен |
||
|
Насос охлаждения штоков включен |
||
|
Ток якоря |
Исключен |
|
|
Число двойных ходов штока насоса |
Аналоговый, из САУ ТП в ПБ |
|
|
Заданное число двойных ходов штока насоса |
Исключен |
Сигнал с пульта бурильщика ПБ при помощи кнопочных постов «Больше» и «Меньше» с сухими контактами поступает через дискретные входы платы клеммных входов/выходов в ТП на цифровой потенциометр САУ ТП, заданное значение скорости поступает на задатчик интенсивности ЗИ, ограничивающий время спада и нарастания скорости, а затем на узел ограничения скорости УОС, с помощью которого можно регулировать максимальное значение тока.
Сигнал с узла УОС поступает на сумматор, на второй вход которого поступает сигнал с блока вычисления ЭДС Е. Значения активного сопротивления обмотки якоря Rя и индуктивности Lя задаются программно, значения тока Iя и напряжения Uя поступают от датчиков тока и напряжения соответственно. ЭДС Евычисляется по выражению:
![]()
Результирующий сигнал по ЭДС, практически достаточно близкий к сигналу по скорости, подается на вход обратной связи регулятора скорости РС.
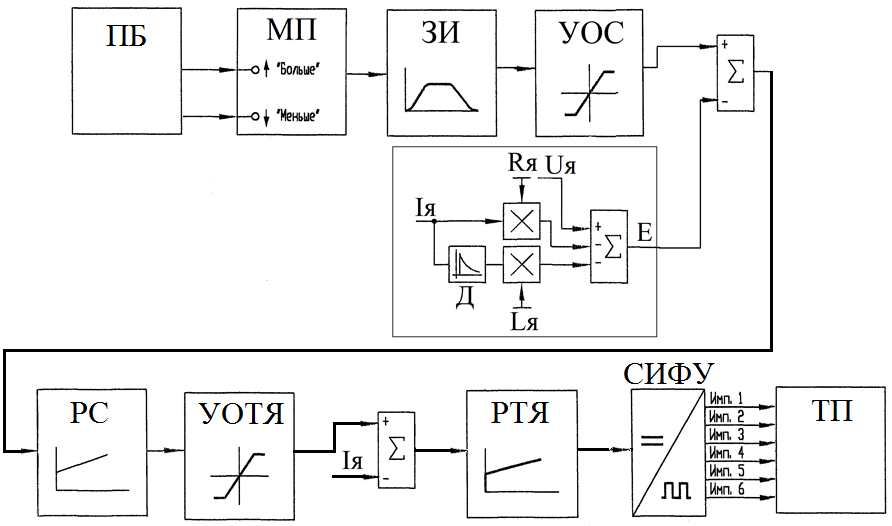
Рисунок 3 – Функциональная схема электропривода бурового насоса, управляемого по системе тиристорный преобразователь – двигатель, с без использования контроллера и коммуникационного модуля
В связи с тем, что привод БН допускает определенный статизм механической характеристики, регулятор скорости принимается пропорционального типа (П-регулятор). Выходной сигнал РС является сигналом задания тока якоря. Сигнал задания тока якоря поступает на узел ограничения тока якоря УОТЯ. Тем самым устанавливается максимальная величина тока.
На прямой вход регулятора тока РТ подается сигнал задания тока от РС и сигнал обратной связи по току от датчика тока. Регулятор тока принимается пропорционально-интегрального типа (ПИ-регулятор), что необходимо для обеспечения лучших статических и динамических характеристик электропривода. На выходе РТ формируется сигнал управления, поступающий в систему импульсно-фазового управления СИФУ, которая формирует импульсы на управляющих электродах тиристоров [3].
Перечисленные ниже функции регулирования могут быть настроены при помощи автоматического конфигурирования:
- конфигурирование регулятора тока для настройки регулятора;
- конфигурирование регулятора скорости для настройки его характеристик;
- автоматическая запись компенсации трения и момента инерции для управления регулятором скорости.
Дополнительно можно все параметры, настроенные при автоматическом конфигурировании, изменить вручную с панели управления.
Автоматическое конфигурирование (или «автоматическая настройка») – функция современных преобразователей постоянного тока, позволяющая автоматически корректировать настраиваемые параметры конфигурации без ручного вмешательства, без программной коррекции настроек или переключения специальных перемычек. Так, например, при автоматическом конфигурировании производится расчет и измерения активного сопротивления обмотки якоря, индуктивности, значение магнитного потока и т.д.
Разработанная система управления буровым насосом внедренная с начала 2016 г. исключила выходы из строя в системах управления, позволила сократить непроизводительное время при бурении скважин, годовой экономический эффект при этом составил более 10 млн. руб.
Список литературы / References
- Шабанов В.А., Никулин О.В. Регулируемый электропривод буровых насосов и его влияние на электрическую сеть // Rogtec Российские нефтегазовые разработки, Выпуск 44, 2016, с. 70-81.
- Никулин О.В., Стеняшин В.Ю., Газизуллин А.Р., Шарипов Р.М. / Свидетельство о государственной регистрации программы для ЭВМ № 2016661647 Direct Control TBN. Заявл. 29.08.2016. Дата регистрации 17.10.2016.
- Моцохейн Б.И., Парфенов Б.М., Шпилевой В.А. Электропривод, электрооборудование и электроснабжение буровых установок. – Тюмень, 1999. – 263 с.
Список литературы на английском языке / References in English
- Shabanov V.A., Nikulin O.V. Reguliruemyj jelektroprivod burovyh nasosov i ego vlijanie na jelektricheskuju set' [Adjustable electric mud pumps and its influence on electric network] // Rogtec Rossijskie neftegazovye razrabotki [Russian oil and gas development], V 44, 2016, s. 70-81. [in Russian]
- Nikulin O.V., Stenjashin V.Ju., Gazizullin A.R., Sharipov R.M. / Svidetel'stvo o gosudarstvennoj registracii programmy dlja JeVM № 2016661647 Direct Control TBN [The certificate on the state registration of the computer program]. Zajavl. 29.08.2016. Data registracii 17.10.2016. [in Russian]
- Mocohejn B.I., Parfenov B.M., Shpilevoj V.A. Jelektroprivod, jelektrooborudovanie i jelektrosnabzhenie burovyh ustanovok. [Electric, electrical and electricity supply drilling rigs] – Tjumen', 1999. – 263 s. [in Russian]