МОДЕЛИРОВАНИЕ ПРОЦЕССА СИСТЕМЫ АВТОСОПРОВОЖДЕНИЯ КОРАБЕЛЬНОЙ АНТЕННОЙ УСТАНОВКИ
Е.Н. Остроух1, Е.Ю.Кулешова2, Д.Д. Габриэльян3
1к.т.н., доцент, 2магистрант, Россия, ДГТУ, 3д.т.н., проф., Россия Ростовский-на-Дону НИИ Радиосвязи
МОДЕЛИРОВАНИЕ ПРОЦЕССА СИСТЕМЫ АВТОСОПРОВОЖДЕНИЯ КОРАБЕЛЬНОЙ АНТЕННОЙ УСТАНОВКИ
Аннотация
Разработана методика, позволяющая производить подбор параметров системы автосопровождения корабельной антенной установки. Построена математическая модель. Разработан и верифицирован программный продукт, обеспечивающей моделирование процесса автосопровождения антенной системы в условиях движения и качки корабля. Проведены численные исследования для выбора параметров системы автосопровождения корабельной антенной установки в условиях движения и качки корабля.
Ключевые слова: программный продукт, спутниковая связь, автосопровождение.
E.N. Ostroukh1, E.Y. Kuleshova2, D.D. Gabriel‘an3
1Ph.d., Associate Professor, 2undergraduate, Russia, DSTU, 3doctor of technical sciences, Professor, Russia Rostov-on-Don RESEARCH Radiocommunication
DESIGN OF PROCESS OF THE SYSTEM OF AUTO ACCOMPANIMENT OF THE SHIP ANTENNA SETTING
Abstract
The developed software allows choosing the parameters of the automatic tracking system of the ship antenna installation. A mathematical model is constructed. Developed verification software that provides process modeling auto-tracking SPACECRAFT antenna in traffic and rolling of the ship. Numerical investigations for selection of system parameters auto-tracking ship antenna installation in terms of movement and rolling of the ship.
Keywords: software, satellite communications, tracking.
В современных условиях широкое применение в мировой практике имеют радиолокационные средства дистанционного зондирования Земли (ДЗЗ), использующие радиолокаторы авиационного и космического базирования [1]. Современные радиолокационные средства ДЗЗ используются для целей картографирования, исследования природных ресурсов, военного применения – всепогодной разведки. Широкое применение получили комплексы ДЗЗ, размещаемые на космических аппаратах, разработанные в ряде стран. Космические ДЗЗ позволяют получать информацию о земной поверхности в различных диапазонах волн, предусмотренных Международным регламентом радиосвязи: 3 см (X-диапазон), 5,6 см (С-диапазон), 9,6 см (S-диапазон), 23 см (L-диапазон) и в перспективе – 70 см (P-диапазон).
После сбора информации на космическом аппарате (КА) её необходимо передать по радиолинии на пункты сбора и обработки информации. Необходимость передачи большого объема информации с космического аппарата, находящегося на круговой орбите с высотой 800-1000 км, требует размещения станций приёма в различных областях поверхности Земли. Система энергоснабжения спутника имеет ограниченную мощность, что не позволяет обеспечить большую скорость передачи информации, вследствие чего для передачи полученного объёма данных требуется значительное время. В связи с этим, несмотря на значительные размеры территории РФ и возможность использования территорий ряда зарубежных государств, возникает необходимость использования пунктов приёма информации корабельного базирования и, соответственно, установки антенн для приёма информации с космических аппаратов на кораблях [2].
В настоящее время в современных системах спутниковой связи и ДЗЗ наибольшее применение находят антенные устройствас диаметром зеркала 3-5 м, работающие в Х-диапазоне. Это приводит к уменьшению массы антенн, что позволяет размещать их на современных кораблях с водоизмещением 4-6 тыс. т., для которых влияние качки проявляется в значительно большей степени [2].
Для приёма информации необходимо обеспечить наведение антенны на спутник. При установке антенн на судне основным источником помех становится их случайное движение из-за качки и нестабильностей хода и дрейфа, что не позволяет без дополнительных усилий сопровождать спутник. В связи с этим при автосопровождении спутникавозникает задача выборапостоянной времени и коэффициента усиленияконтура управления корабельной антенной с учётом движения и качки корабля. Математическая модель движения космического корабля относительно антенны без гиростабилизируемой платформы с учётом качки корабля описана в работе.
Работа актуальна в связи с необходимостью построения системы управления на корабле с целью обеспечения точного наведения антенны в условиях движения и качки корабля.
Разработанный программный продукт, позволяет подбирать оптимальные параметры системы автосопровождения корабельной антенной установки. При этом решаются следующие задачи:
- построение математической модели;
- разработка и верификация программного продукта, обеспечивающего моделирование процесса автосопровождения КА антенной в условиях движения и качки корабля; проведение численного эксперимента.
Построение математической модели. Рассмотрим работу с моноимпульсной системой с контуром обратной связи [1-2]. Моноимпульсная система управления включает устройство управления положением (установкой) антенны, моноимпульсный контроллер и моноимпульсный приёмник. Последний включает фидерный тракт, малошумящий усилитель и блок V приёмника (BVR). Блок V приёмника представляет собой устройство обработки сигналов радиочастоты S-, X- или Ka-диапазона на входе и демодулированным сигналом на выходе. На рисунке 1 представлена структурная схема описанной системы.
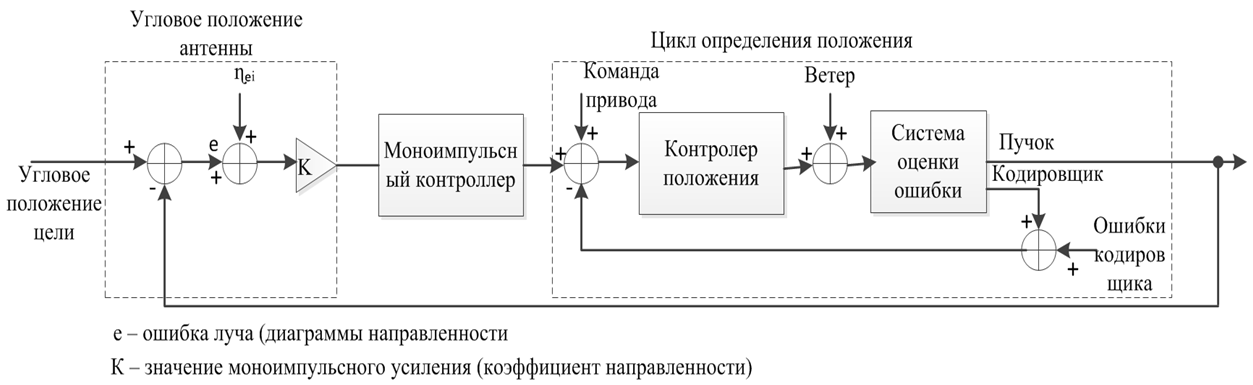
Рис. 1 – Структурная схема моноимпульсной системы управления по углу места
Для контура автосопровождения с двумя интеграторами характерно:
- при постоянном внешнем воздействии (статичное положение спутника) ошибка автосопровождения отсутствует;
- при линейном характере движения спутника, ошибка автосопровождения с течением времени стремится к постоянному значению;
- при квадратичном характере движения космического аппарата, ошибка автосопровождения с течением времени линейно нарастает.
Выше описанные случаи не соответствуют движению КА относительно антенны в условиях качки корабля. Движение КА в этом случае является знакопеременным периодическим процессом, при котором бесконечно большая ошибка не может возникнуть. Однако, даже относительно небольшое рассогласования углового положения электрической оси антенны относительно положения КА может привести к потере связи. Кроме того, необходимо минимизировать рассогласованиеуглового положения электрической оси антенны относительно положения КА для повышения энергетического потенциала радиолинии и соответственно скорости передачи данных с КА на пункт управления на корабле. Таким образом, необходимо определить параметры системы автосопровождения, при которых минимизируется или максимальная ошибка автосопровождения, или среднеквадратическое отклонение углового положения электрической оси антенны относительно КА в условиях движения и качки корабля.
Согласно выкладкам, приведённым в работах [1-2], можно использовать упрощённую модель схемы моноимпульсной системы управления с двигателем, показанной на рисунке 2.

Рис. 2 – Упрощённая структурная схема моноимпульсной системы управления
В операторной форме характеристическое уравнение, описывающее работу контура, можно представить в виде:
Составим характеристическое уравнение (в дифференциальной форме):
Или в операторной форме [2]:
Корнями характеристического уравнения являются корни:
![]()
Система устойчива, когда действительные части обоих корней имеют отрицательный знак.
Разработка и верификация программного продукта. С математической моделью, согласно которой произведено программирование расчётов, можно ознакомиться в работах [1-3].
Согласно приведённой математической модели разработан программный продукт, представленный на рисунке 3, который позволяет провести необходимые расчёты и их дальнейший анализ.
Рисунок 3 – Начальная форма программного продукта
Решение каждого уравнения численно и аналитически позволяет убедиться в верности полученного результата.
Для верификации разработанного программного продукта были произведены исследования при различных значениях параметров k и Т и различном характере внешнего воздействия. Анализ наведения статично расположенной антенной установки на статично расположенный КА, положение которого описывается уравнением θ(t)=0.2, показал, что ошибка автосопровождения отсутствует. Исследования проводились при изменении параметров k и Т от 0.05 до 0.1 и показали, что чем больше коэффициент усиления k, тем быстрее происходит наведение антенны на космический аппарат. Влияние изменения параметра Т незначительно, однако, прослеживается следующая зависимость: чем меньше значение параметра Т, тем быстрее наводится антенна.
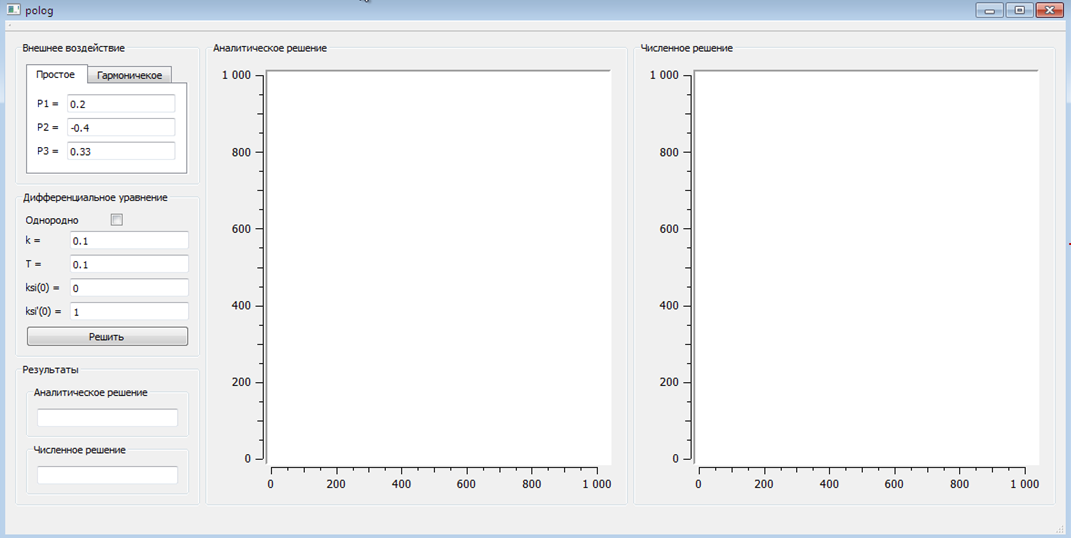
Рис. 3 – Начальная форма программного продукта
Анализ скорости наведения статично расположенной антенной установки на линейно движущийся КА, движение которого описывается уравнением ![]()
показал, что ошибка автосопровождения с течением времени принимает постоянное значение. Были рассмотрены случаи изменения параметров k и Т от 0.05 до 0.1 и анализа полученных результатов можно сделать выводы: изменение параметра Т вносит незначительные коррективы; изменение параметра k влияет следующим образом: чем больше значение параметра k, тем меньше отставание антенны от космического аппарата и тем быстрее происходит наведение до оптимального значения. Чем больше величина коэффициента усиления k, тем меньше установившееся значение отставания антенной установки от космического аппарата. Анализ скорости наведения статично расположенной антенной установки на квадратично движущийся КА, движение которого описывается уравнением ![]() оказал, что ошибка автосопровождения с течением времени линейно нарастает. Были рассмотрены случаи изменения параметров k и Т от 0.05 до 0.1 и анализа полученных результатов можно сделать выводы: чем больше коэффициент усиления k, тем меньше отставание антенны от космического аппарата; изменение параметра T явных изменений не вносит. Ошибка автосопровождения линейно нарастает с различной скоростью (чем больше величина коэффициента усиления k, тем медленнее происходит нарастание отставания).
оказал, что ошибка автосопровождения с течением времени линейно нарастает. Были рассмотрены случаи изменения параметров k и Т от 0.05 до 0.1 и анализа полученных результатов можно сделать выводы: чем больше коэффициент усиления k, тем меньше отставание антенны от космического аппарата; изменение параметра T явных изменений не вносит. Ошибка автосопровождения линейно нарастает с различной скоростью (чем больше величина коэффициента усиления k, тем медленнее происходит нарастание отставания).
Графики аналитического и численного решений совпадают, как и результаты вычислений, из чего можно сделать вывод о корректности составленной модели.
В условиях движения и качки корабля движение КАУ относительно КА описывается уравнением ![]() Исследования производились при различных значениях параметров А, α, φ0. Параметры k и Т изменялись от 0.05 до 0.1.
Исследования производились при различных значениях параметров А, α, φ0. Параметры k и Т изменялись от 0.05 до 0.1.
Анализ результатов расчетов, в которых движение КАУ описывалось уравнением ![]() , показал, что ошибка автосопровождения с течением времени стремится к нулю и колеблется около нуля с периодичностью ≈ ±0.02, k = 90, T = 0.05. При таких же значениях параметров k и Т и движении КАУ, описываемом
, показал, что ошибка автосопровождения с течением времени стремится к нулю и колеблется около нуля с периодичностью ≈ ±0.02, k = 90, T = 0.05. При таких же значениях параметров k и Т и движении КАУ, описываемом ![]() уравнением расчеты показали, что ошибка автосопровождения ничтожно мала.
уравнением расчеты показали, что ошибка автосопровождения ничтожно мала.
Выводы.
- Выбранная математическая модель позволила реализовать ПП для возможности расчётов параметров автосопровождения КАУ КА.
- Разработанный ПП обеспечил моделирование процесса автосопровождение КА антенной в условиях движения и качки корабля; проведённые исследования показали корректность составленного ПП и влияние изменения значения параметров k и Т на скорость наведения антенной установки на КА.
Проведённые численные исследования позволили выбрать оптимальные параметры системы автосопровождения корабельной антенной установки в условиях движения и качки корабля.
Литература
- Неронский Л.Б., Михайлов В.Ф., Брагин И.В. Микроволновая аппаратура дистанционного зондирования поверхности земли и атмосферы. Радиолокаторы с синтезированной аппаратурой антенны. Учебное пособие /Л.Б. Неронский, В.Ф. Михайлов, И.В Брагин.-М: Радиотехника, 2010
- Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы земле обзора космического базирования / В.С. Верба, Л.Б. Неронский, И.Г. Осипов, В.Э. Турук.-М: Радиотехника, 2010
- Г. Корн, Т.Корн. Справочник по математике (для научных работников и инженеров).-М: Наука, 1973
References
- Neronskij L.B., Mihajlov V.F., Bragin I.V. Mikrovolnovaja apparatura distancionnogo zondirovanija poverhnosti zemli i atmosfery. Radiolokatory s sintezirovannoj apparaturoj antenny. Uchebnoe posobie /L.B. Neronskij, V.F. Mihajlov, I.V Bragin.-M: Radiotehnika, 2010
- Verba V.S., Neronskij L.B., Osipov I.G., Turuk V.Je. Radiolokacionnye sistemy zemle obzora kosmicheskogo bazirovanija / V.S. Verba, L.B. Neronskij, I.G. Osipov, V.Je. Turuk.-M: Radiotehnika, 2010
- G. Korn, T.Korn. Spravochnik po matematike (dlja nauchnyh rabotnikov i inzhenerov).-M: Nauka, 1973