МОДЕЛИРОВАНИЕ АЭРОНАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ В ЧЕТЫРЕХМЕРНОМ ПРОСТРАНСТВЕ
Пашаев A.M.1, Набиев Р.Н.2, Султанов В.З.3, Бабаев Г.Б.4
1доктор физико-математических наук, профессор, академик НАН Азербайджана, ректор; 2доктор технических наук, профессор, нач. отдела; 3кандидат технических наук, зав.кафедры; 4диссертант / Национальная Академия Авиации Азербaйджана.
МОДЕЛИРОВАНИЕ АЭРОНАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ В ЧЕТЫРЕХМЕРНОМ ПРОСТРАНСТВЕ
Аннотация
В статье были исследованы моделирование основных параметров аэронавигационного обеспечения, рабочих зон радиоинформационных полей и траектории планирования ВС, виртуальные маршруты полеты и захода на посадку ВС и т.д. Моделирование создает условия освоения четырехмерной среды, повышение экономических, технических параметров, показателей безопасности и уровни адаптации, уменьшения коэффициент риска.
Ключевые слова: моделирование, аэронавигационное обеспечение, радиоинформационные поля, радиосигналы, аэронавигация.
Pashayev A.M.1, Nabiyev R.N.2, Sultanov V.Z.3, Babayev H.B.4
1doctor of physics and mathematics, professor, academician of Azerbaijan National Academy of Sciences, rector; 2Doctor of Technical Sciences, professor, сhief of department; 3PhD - doctor of philosophy (engineering), dosent, head of Department; 4dissertant / National Aviation Aсademy Azerbaijan;
MODELING AIR NAVIGATION SERVICES IN FOUR DUMENTIONS PROVISION
Abstract
The article studied modeling the main parameters of air navigation, work areas of radio information fields and aircraft trajectory planning, virtual flight routes and landing aircraft, etc. Simulation creates the conditions of development of the four-dimensional environment, enhancing economic, technical parameters, safety performance, levels of adaptation and reducing the risk factor.
Keywords: modeling, aeronavigation service, radioinformation fields, radiosignals, aeronavigation.
Использование объемной визуализации, при организации УВД и различного рода тренингов по аэронавигационному обеспечению полетов в ГА, дает возможность коренным образом изменить классические методы и подходы по усовершенствованию методов визуализации в пространстве [1 - 3]. Большое количество исследований, проведенных в многомерных средах с помощью современных программно-технических средств доказали, что данный метод дает возможность получения более эффективных результатов [4 - 5].
В гражданской авиации, особенно в процессе аэронавигационного обеспечения (AHO) полетов, полное освоение трехмерной (в основном четырехмерной) среды и принципов построения пространства, высокого уровня визуального представления со стороны персонала; пилотов, диспетчеров УВД и инженерно-технического состава - является очень важным и необходимым этапом подготовки. В этом случае описание процессов деятельности в наглядности и динамике отображаемых процедур в целях принятия правильных решений персоналом в различного рода ситуациях, с учетом конкретных условий «время-среда», упрощается и обеспечивается в полной мере уровень практических знаний необходимый для обеспечения требуемого уровня по безопасности воздушного движения при УВД.
Таким образом внедрение процессов визуализации в пространстве дает не ограниченную техническую возможность, при всех видах подготовки, изучения и деятельности сотрудников, подменяя собой различные используемые наглядные пособия, для пилотов, навигаторов и диспетчеров УВД, инженерно-технического персонала аэронавигационного обслуживания всех видов полетов. Также этот метод применим при современном развитии гражданской авиации в целом и может использоваться:
- для вновь принятых специалистов, проходящих первичную и повторную подготовки;
- при повышении квалификации сотрудников, а также при различных этапах очного и заочного обучения, - таких как лекции, семинарные и лабораторные работы;
- как наглядное пособие для слушателей и студенческого состава проходящего производственную практику.
В этой статье рассматриваются проблемы возникающие при подготовке персонала и обучении методам аэронавигационного обеспечения, при повсеместном использовании различного рода аэронавигационного оборудования, которое в свою очередь обладает рабочими зонами средств обеспечения, электромагнитной совместимостью между объектами, действием различных объектов на уровне элементов, моделированием процессов и радиоинформационных полей, наличие и расположение коридоров и маршрутов полета ВС, наличие запретных зон, а так же созданием траекторий полетов ВС, определение возможных виртуальных проекций ВПП и их направления для взлета и посадки с учетом рельефа местности и различных ограничительных зон с применением элементов моделирования в четырехмерной среде.
В этих целях проводятся многочисленные исследования [4-6], что дало возможность, приближения к реальной визуализации в пространстве малого объема тех процессов, которые видеть в реальности просто не возможно ибо на самом деле радиоинформационные поля по своим параметрам разные и имеют сложные характеристики, к тому же они различны по параметрам, методам и техническим средствам применения [2, 3, 11].
При презентации результатов, графический метод на плоскости менее результативен, чем пространственное моделирование в четырехмерной среде 4D и он не позволяет наглядно и эффективно освоить процессы происходящие в воздушном пространстве. Для моделирования аэронавигационного обеспечения, при выполнении полетов, в четырехмерной среде, необходимо учитывать структуру Земли и системы координат.
В ICAO (International Civil Aviation Organization - Международная Организация Гражданской Авиации - ИКАО) с 01 января 1998 года принята к использованию системы координат WGS-84 (World Geodetic System - Международная Система Геодезии – 1984) – использующаяся, как общая геодезическая система в гражданской авиации. Это решение было принято для поддержки развивающихся спутниковых технологий, и определяется документом Doc.9674 (Руководство по всемирной геодезической системе – 1984 (WGS-84)) [7], Приложение-4 (Аэронавигационные карты) [8] и Приложение-15 (Службы аэронавигационной информации) [9].
Понятно, что с применением четырехмерного моделирования появилась возможность получения большего числа визуальных эффектов. Из-за этого это моделирование применяется для виртуальной модели Земли, а точность может соответствовать параметрам трехмерной координатной системы WGS-84 [9]. В системе координат WGS-84 координаты определяется относительно центра тяжести Земли и погрешность в сравнении с другими координатными системами минимальная.
В этой системе за нулевой меридиан принят меридиан, находящийся от меридиана Гринвича на восток 5,31'' IERS (International Earth Rotation and Reference Systems Service – Международная служба вращения Земли - МСВЗ). Разница между системой координат WGS-84 и Геоидом составляет меньше 200 м [10]. Для создания многомерной визуализации это вполне допустимо. В таблице 1 даны большие (экваториальные) и малые (полярные) радиусы Земли в соответствии с различными системами координат в сравнительной форме.
Таблица 1.
|
Название |
a, км (экваториальный радиус Земли) |
1/f |
|
WGS-84 |
6378,137 |
298,257223563 |
|
GRS -80 |
6378,137 |
298,257222101 |
|
IERS-96 |
6378,13649 |
298,25645 |
|
ПЗ-90 |
6378,136 |
298,257839303 |
f — геометрическое сжатие эллипсоида  ,
,
c — полярный радиус Земли.
Моделирование может иметь унифицированное программное обеспечение. При этом, всегда есть возможность адаптироваться, в любой момент, к быстроразвивающимся программным методам и технологиям, что считается важным условием.
С внедрением используемых в настоящее время методов визуализации, технических и программных средств, современных технологических подходов по аэронавигационному обеспечению, возможно выполнение очень интересных и эффективных научных исследований. Процедуры, выполняющиеся ВС, возможно виртуально имитировать в четырехмерной (4D = 3 пространство + 1 время) среде фактически в достаточной степени реальности. И в этом направлении проводятся различные исследования и внедрения [4 - 6]. Но мы, углубляя исследования по этому направлению, работаем над новыми подходами и методологиями по моделированию радиоинформационных полей в среде 4D и по тренажерным системам (в будущем это может быть применено в оперативных системах УВД (Управление Воздушным Движением), что в свою очередь дает неограниченные возможности по решению соответствующих проблем по улучшению авиационной радиосвязи, качественного использования и расположения средств радионавигации, радиолокации, и расположения ВПП и коридоров аэроузлов а так же воздушных трасс.
Первоначально, проанализированы существующие методы и принципы моделирования аэронавигационного обеспечения, а также исследованы технические возможности при аэронавигационном обеспечении движения ВС (воздушного судна) в виртуальном пространстве [11, 12] с использованием модели Земли и основных систем координат. С целью обеспечения последовательности положения ВС в пространстве дается объяснение геометрического моделирования в среде 3D и математическое объяснение реперам (начальной точки) системы координат навигации [12, 13]. В зависимости от последовательности процессов проводятся моделирования, в качестве примера, в горизонтальной и вертикальной плоскостях. В этом случае принимаются во внимание траектории полета ВС в различных плоскостях проекцирования и в соответствии с этим навигационными измерениями и конкретными положениями ВС в пространстве.
В соответствии с рис.1 математическая модель радиосигналов рассматривается, как его отдельные векторные величины составляющие: (вектор электрического поля – Е, вектор магнитного поля – Н и вектор направлении Умова-Поинтинга – S) [2] (рис. 1а). Для графического представления этих параметров векторные величины показанные на рис. 1а внедрены на трехмерных координатных осях ОХ, ОУ и OZ показаны на рис. 1б.
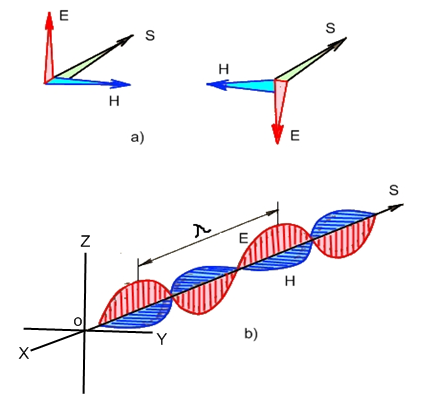
Рис.1. - Радиоволна.
а) направление распространения; б) графическое представление.
Таким образом, представление осуществляется в соответствии пиксельной презентации аксонометрии в двумерной (2D) среде, т. е. один из плоскостей XOY, XOZ, YOZ. Перевод такого рода презентации на 3D (в соответствии с принципами вокселя) или 4D (в соответствии с принципами докселя) - возможно. Но цель нашего исследования обеспечение АНО именно в средах 3D или 4D с помощью внедрений радиоинформационных полей в многомерных средах, в которых основу этих излучаемых полей составляют радиосигналы излучаемые различными навигационными средствами. Неотъемлемой частью этих процессов считаются принципы создания в пространстве видимых визуально радиоинформационных полей средств радионавигации ((D)VOR/DME - (Dopler) Very High Frequency Omni-directional Radio Range – (доплеровский) всенаправленный азимутальный радиомаяк очень высокой частоты, / DME (Distance Measuring Equipment – дальномерный радиомаяк), ILS - Instrumental Landing Systems – инструментальная система посадки, MLS – Microvawe Landing Systems - Микроволновая система посадки) и т.д., а также полей излучения (радиолокации, мультилатерации – MLAT и т.д.) и связи (наземной, спутниковой и т.д.), то есть их математические, геометрические и информативные модели и т.д. [2, 10, 13].
Модель информационного поля системы CNS/ATM AS (Communication, Navigation and Surveillance / Air Traffic Control Automated Systems – Связь, Навигация и Наблюдения / Автоматизированные Системы УВД) должна соответствовать математическим и пространственным принципам конкретной области, а именно, областей средств связи, навигации и наблюдения, которые обеспечивают радиосигнальное обеспечение аэронавигации. Модельное описание считается эффективным методом и средством открытия характера исследовательской задачи.
Практические процессы, осуществляемые в среде 2D при перемещении к средам 3D или 4D принципам визуализации, меняются соответственно в этих средах. В настоящее время при применении существующих дисплеев диспетчеры УВД выполняют основные процессы УВД - наблюдение и сопровождение целей, а так же планировании ВД и другие функции.
При процессах первичной подготовки так же важно принять во внимание реальную ситуацию в воздушном пространстве, моделирование самого воздушного пространства и ее многочисленных сегментов (воздушных трасс, навигационных точек, различных эшелонов полета и безопасных высот с зонами ограничений и запретов, полигоны и т.д.), в то же время довести все это до уровня визуальной оценки с запоминанием объемной информации.
С помощью средств программного обеспечения, которые создают соответствующие пространственные модели, за счет визуализации виртуального Земного шара и в соответствии с конкретным характером научно-исследовательской работы, можно явно смоделировать любые элементы аэронавигационного обеспечения в виде виртуального контролируемого и не контролируемого воздушного пространства.
Аэронавигационные элементы: воздушные трассы (airways), навигационные точки (points), районные и аэродромные зоны (ACC – Area Control Centre /APP - Approach), стандартные схемы захода на посадки и посадки (STAR - Standard Arrival Chart), стандартные схемы вылета (SID – Standard Instrumental Departure Chart) и схемы вылета и посадки (RWY – RunWay Chart) моделируются в 3D среде с учетом рельефа Земли (рис. 2).
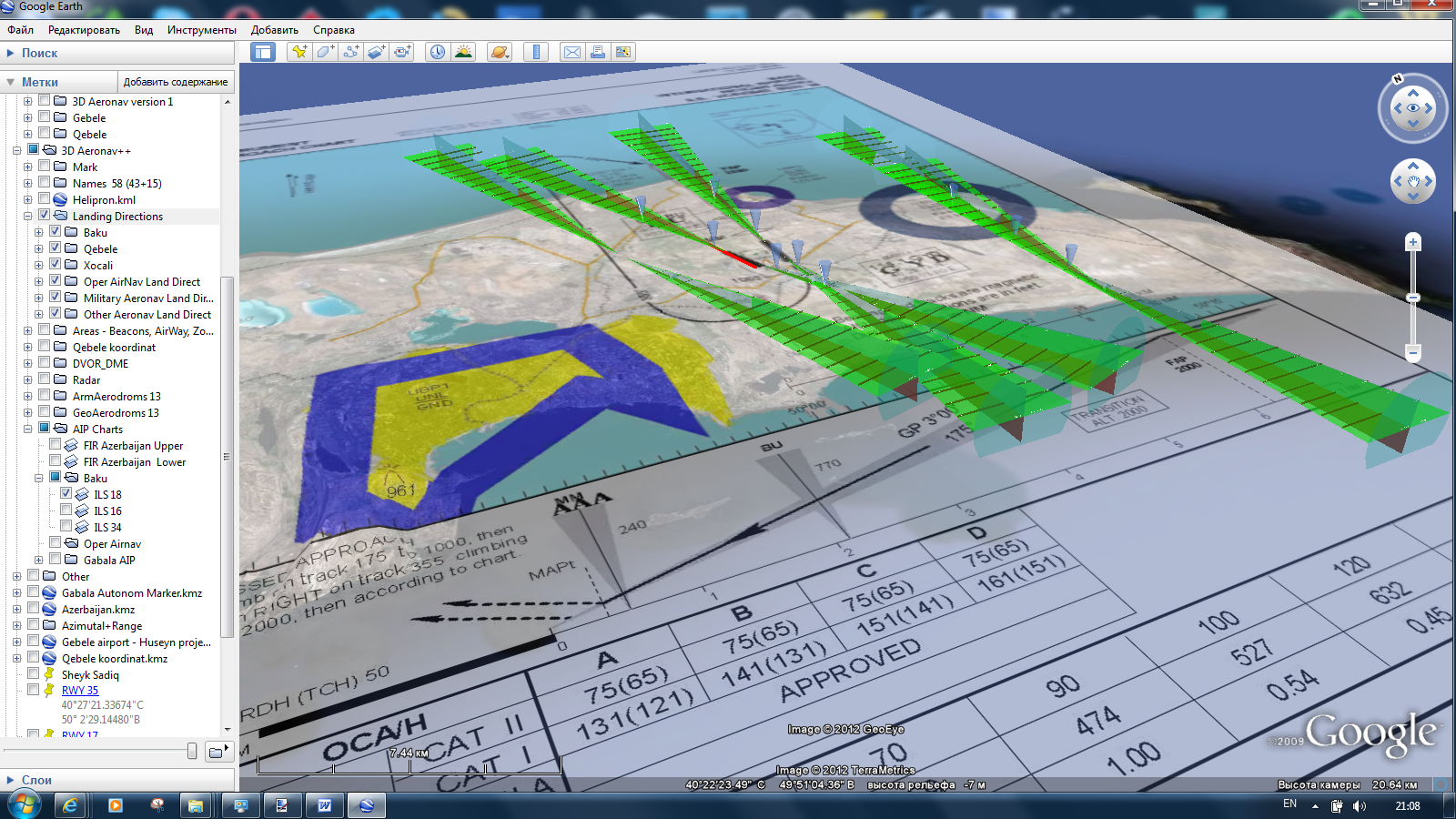
Рис. 2
Моделирование радиоинформационных полей во многомерной визуальной среде в соответствии с принципами вокселей и докселей, при аэронавигационном обеспечении, а также многих функциональных возможностей по АС УВД, конкретно функции по обеспечению безопасности полетов ВС в гражданской авиации (Safety Nets in Сivil Аviation) являются частью этой идеи. Далее можно показать нижеследующие примеры к функциям Safety Nets in Сivil Аviation: предупреждения о краткосрочном конфликте (до 2 минут) – STCA (Short Term Conflict Alert), запретные зоны полетов – Rst.Area (Restricted Area) и предупреждения о нарушении опасных зон – DAIW (Danger Area Infringement Warning), оповещения об опасном приближении (1-2 минут) – APW (Area Proximity Warning), предупреждения о минимальной безопасной высоте полета - MSAW (Minimum Safe Altitude Warning) [3] и т.д.
Моделирование пространственного положении ВС над схемами посадки и радиоинформационными полями системы ILS и его движения во времени, позволяет лучше освоить радиодиаграммы созданные излучением маяков курсового (LLZ - Localizer), глиссадного (GP - Glaude patch) и маркерного радиомаяками, а так же траектории планирования полетов ВС во время посадки.
С помощью наших исследований произведено соответствующее моделирование положения ВС в пространстве (рис. 3) на смоделированных аэродромах в предполагаемой местности строительства или реконструкции, в тех местах, которые никогда раньше не имели авиационной инфраструктуры (напр., Международный Аэропорт Габала).


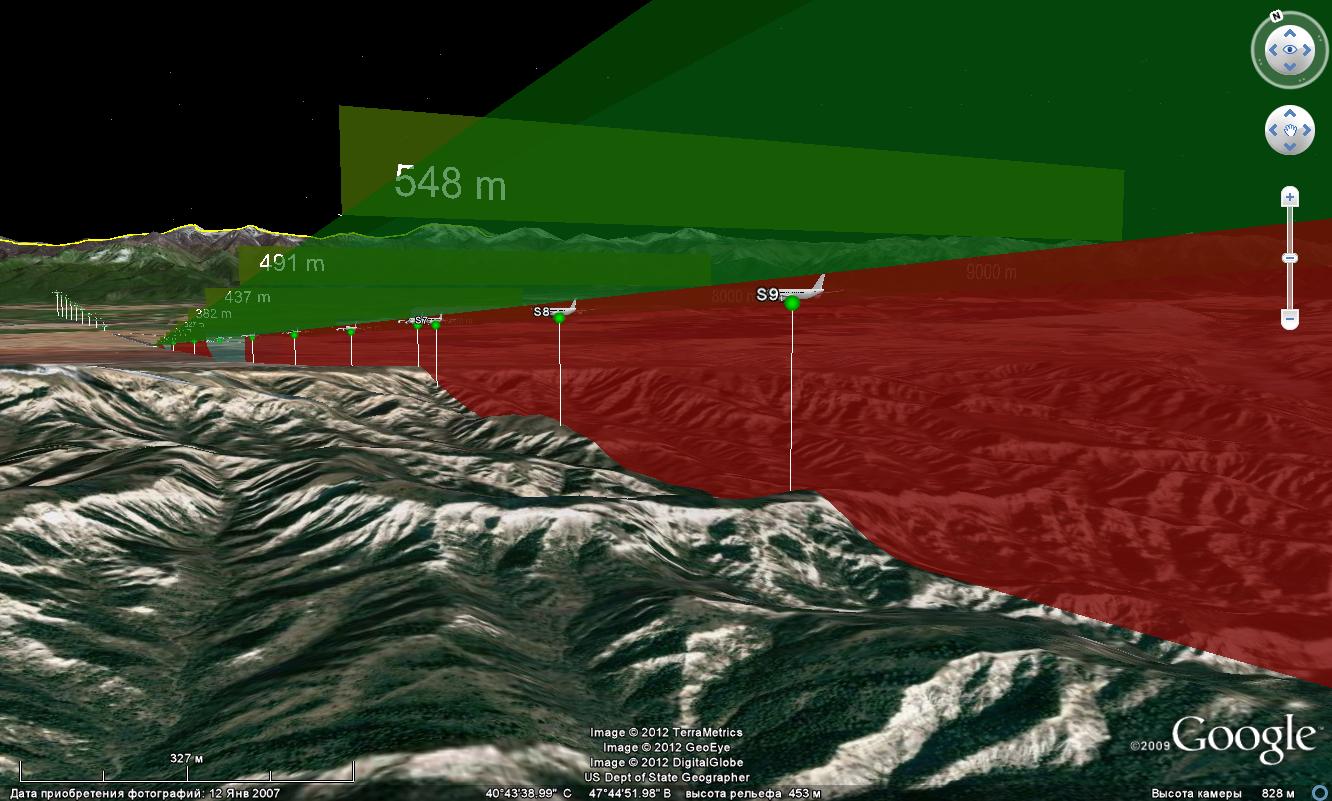
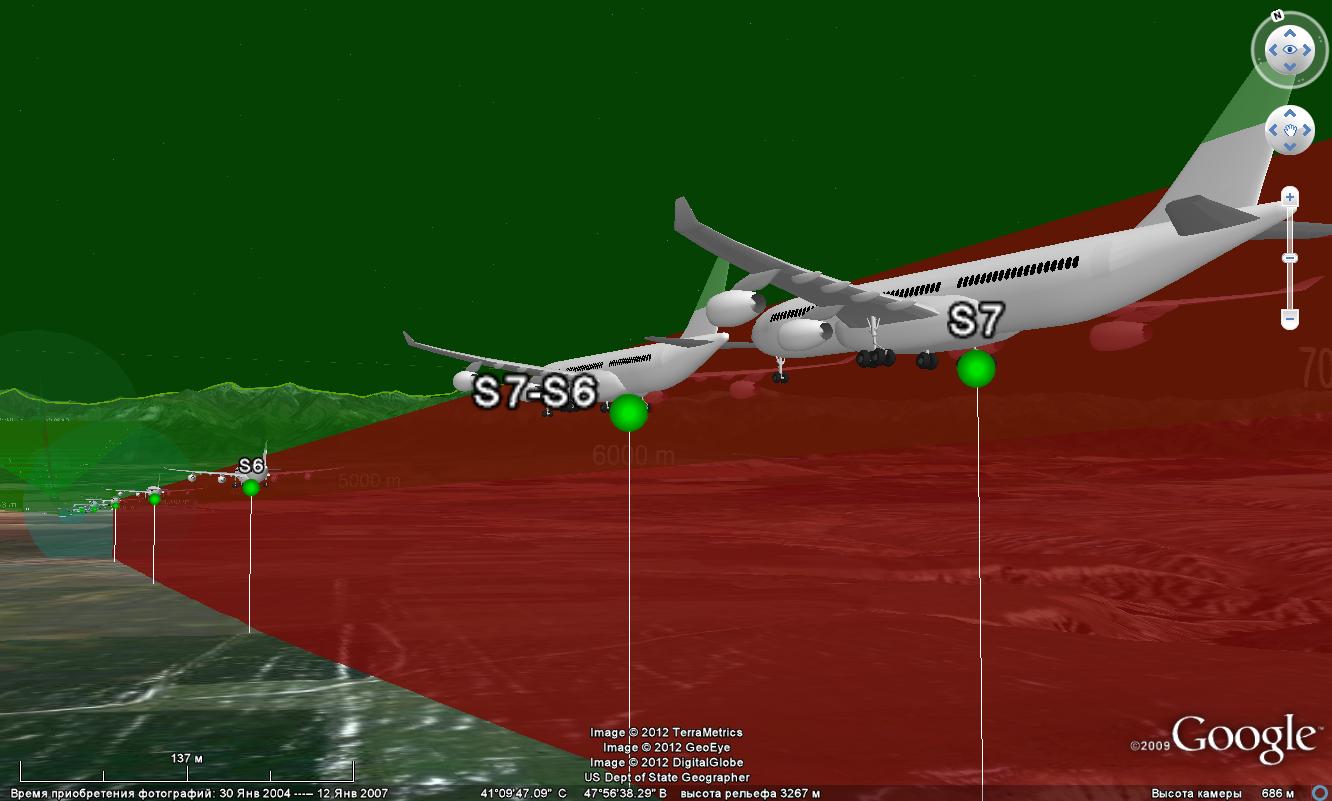
Рис. 3
Выбор и проектирование залегания новой ВПП в горной местности и направлений подхода и посадки, расположения радиотехнических и радиолокационных средств, а также исследование состояния электромагнитной совместимости на данной территории, исследование зон действия вблизи находящегося и имевшего сильную радиоизлучающую мощность (мощность излучения 100 МВт в диапазоне радиочастот 3 - 30 МГц, холостой (при не работе 99%) мощность – 2 МВт, зона действия – 7200 км, способность определения – 0,1 м3 загоризонтного радиолокационного комплекса Дарьял [17 - 18]), а также взаимодействие электромагнитных излучателей эксплуатирующихся на этом объекте (эти материалы подготавливаются к печати).
На следующем этапе при моделировании аэронавигационного обеспечения по определенному маршруту полетов считалось целесообразным создание в четырехмерной среде модели радиоинформационного поля системы (D)VOR/DME, 4D модели зоны действия функции RNAV (Area navigation – зональная навигация), с транзитным условным ортодромическим маршрутом полета условного ВС, проходящего через воздушное пространство Азербайджанской Республики и следующего по линии Дублин (Ирландия) – Хайдарабад (Индия) (рис. 4). При этом учтены воздействия на полет очень различных факторов, которые находятся на этом условном маршруте: это участки с большой интенсивностью воздушного движения в зоне Европы, различной местностью - горы, пустыни и водные пространства, множеством воздушных трасс, а та к же запретных зон и зон ограничений полетов, с различным уровнем технического обеспечения и возможностей УВД и т.д. Презентация предоставленной в такой интерактивной и четырехмерной среде (4D кибер модели Земли) создает максимальный визуальный эффект.
В соответствии с выше указанным принципом, смоделированы реальные зоны действия радиолокационных станций, радиолокационного покрытия маршрута в зависимости от высоты полета и типа РЛС и точно определены виды и наличие зон не видимости.
Проанализированы в условном порядке и перегруппированы действующие, и уже прекратившие свое действие, но физически пока существующие аэродромы и площадки для аварийной посадки ВС с различными назначениями [14]. 3D модели конкретных аэродромов, ВПП и площадки посадки воздушных судов разработаны по принципам вокселей, а в перспективе, с учетом фактора времени, предусматривается адаптация к принципами докселя.
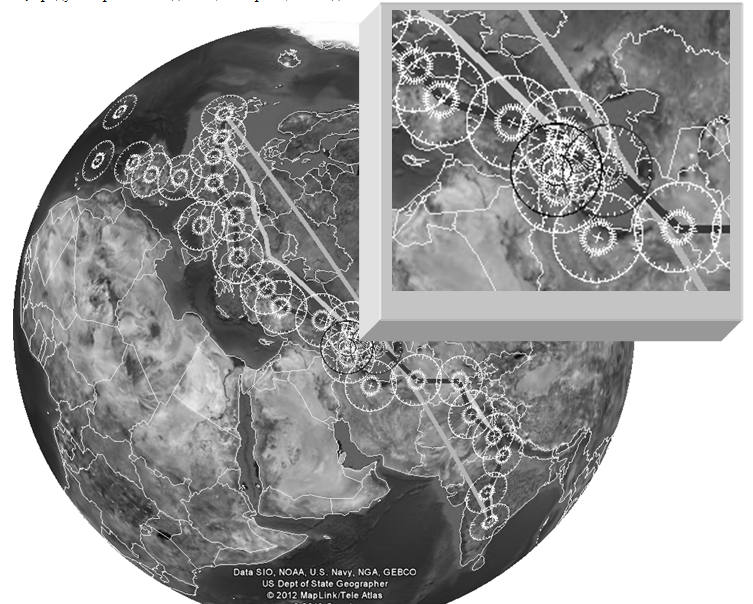
Рис. 4. - Вид условного виртуального маршрута.
Данные аэродромов для моделирования в 4D взяты с AIP [15] и Сборников аэронавигационных данных Jepessen, в целях визуализации траекторий полетов в нижней зоне аэродромов использованы карты и схемы SID, STAR, а также положение ВПП и ее направление.
На следующем этапе исследований выполнены виртуальные (кибер) полеты ВС. Возможности этого метода безграничны что в свою очередь дает возможности изменить качество подготовки к полетам экипажей по впервые выполняемому маршруту что повлияет на уменьшение воздействия на выполнение полета человеческого фактора, так же важности моделирования для преодоления психологического барьера и начального воздействия на экипаж при выполнении первых дальних и сверх дальних полетов и его адаптации к ожидаемым трудностям. В результате это приводит к экономии ресурсов при обеспечении требуемого уровня безопасности полетов и исключения влияния негативного человеческого фактора на исход полета.
В ходе реализации виртуальных полетов используется имитационная модель, с участием экспертов, в состав которых включаются опытные пилоты, диспетчеры и инженерно-технический персонал. В результате, коэффициент фактора риска потерь значительно уменьшается.
Проведенные исследования позволяют сделать следующие общие выводы:
- методология обучения (подготовка) МАНО4D дает достаточно ощутимый эффект при обучении, подготовке и тренировке летного и диспетчерского состава ГА, инженерно-технического персонала и специалистов аэронавигации, которые вновь принимаются на работу, при прохождении аттестации и повышении уровня допуска, а также как учебное пособие для лекций, семинаров и лабораторных работ на различных этапах учебного процесса слушателей и студентов проходящих практику на производстве;
- методология МАНО4D эффективно раскрывает природу задачи исследования и описания процессов;
- МАНО4D позволяет лучше усвоить радиоинформационные поля и траектории планирования полета ВС по существующим схемам или проверке схем захода на посадку ВС ГА;
- С помощью методологии МАНО4D возможно проанализировать механизмы взаимодействия электромагнитных излучателей, которые эксплуатируется на объектах различного назначения;
- МАНО4D дает возможность виртуально определять возможные направление ВПП с учетом рельефа местности и позволяет, соответственно, принять к сведению при проектировании аэродромов ГА;
C помощью методологии МАНО4D возможно выполнить любые виртуальные полеты, и эти тренировки в свою очередь, качественно влияют на уровень подготовки специалистов летного и аэронавигационного обеспечения и значительно уменьшает коэффициента риска и повышает уровень обеспечения безопасности полетов ВС при УВД.
Список литературы
Doc 9854. AN/458. Global Air Traffic Management Operational Concept. First Edition. ICAO 2005.
Изюмов Н.М. Линде Д.П. Основы радиотехники. Учебная серия. М., «Энергия», 1971. 480с.
Пятко C.Г., Красов А.И. Автоматизированные системы управления воздушным движением. СПб: Политехн,2004, 446с, İSBN5-7325-0779-5.
Pallav Laskar B.E. Graphical user interface for Air Traffic Control. Dissertation. Kent State University (USA)-2012. p:150.
Jie Bai. Robust navigation algorithms for aircraft precision approach, landing and surface movement using global navigation satellite systems. Dissertation. London, United Kingdom, September, 2008. p:237.
Thu D. Nguyen. System Support for Distributed 3D Real-Time Rendering on Commodity Clusters. Dissertation. University of Washington (USA) 1999. p:154.
ICAO Doc.9674. Руководство по Всемирной геодезической системе – 1984 (WGS-84) Издание второе. 2002.
ICAO Annex-4. Аэронавигационные карты Издание 10. Июль 2001г.
ICAO Annex-15. Службы аэронавигационной информации. Издание 12. Июль 2004 г
National İmagery and Mapping Agency. Technical Support. NIMA TR8350.2 Third Edition. Amendment 1. 3 january 2000. NSN 7643-01-402-0347.
Михайлов Н.А. Воздушная навигация. Международные полеты. Новосибирск.: BestTech-Avia. 2000. 167c.
Лебедев М.И. Самолетовождение. Учебное пособие для летчиков и штурманов гражданской, военно-транспортной и стратегической авиации. Ставрополь. 2003. 143 c.
Советов Б.Я., Яковлев С.А. Моделирование систем.-М.: Высш. шк., 2001. -343 с: ил. ISBN 5-06-003860-2.
Султанов В.З. Сборник аэронавигационной информации по МВЛ Азербайджана, 08.05.1981г. 206 c.
Aeronautical Information Service (AIP) Azerbaijan. May 2012.
http://www.dissercat.com/search?keys=Виртуальная реальность 05.13.11.
http://www.psiterror.ru/. Надгоризонтные и загоризонтные радио локационные станции - военные гиганты.
http://www.arms-expo.ru/. История создания РЛС дальнего обнаружения баллистических ракет и космических объектов.