ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО АВТОМОБИЛЯ
Хадеев Р.Г.
Кандидат технических наук. Гос НИИИ ВМ МО РФ
ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО АВТОМОБИЛЯ
Аннотация
В статье предложена схема гибридного привода для транспортного средства с автоматическим изменением передаточного отношения и крутящего момента посредством включения в трансмиссию планетарного дифференциала с постоянным включением шестерен.
Ключевые слова: Гибридный привод, планетарный дифференциал, электрическая машина двойного вращения, крутящий момент.
Khadeev R. G.
Candidate of Technical Sciences. Research and Test Institute of Military, Medicine Russian Ministry of Defense
TRANSMISSION FOR HYBRID VEHICLE
Abstract
The hybrid drive for transport vehicle with automatic change in gear ratio and torque moment with the help planetary gears with permanent mesh of gear wheels is suggested.
Keywords: hybrid drive, planetary differential, double acting electrical machine, torque moment.
В статье предложена схема трансмиссии для гибридного транспортного средства. Устройство несложное, надёжное, нет слабых звеньев, нет переключений шестерён с отключением мощности двигателя от ведомого вала. Управление мощностью передаваемой от двигателя плавное, в широком диапазоне. Главное преимущество – простота и возможность использования наиболее экономичного режима на любом этапе работы.
1
Состоит трансмиссия из трёх элементов, содержащих дифференциальный механизм. Основным устройством является дифференциал, соединяющий двигатель и генератор с последующими элементами трансмиссии. На схеме на Рис.1 показано включение дифференциала и генератора.
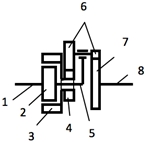
1.Вал двигателя. 2.Ротор генератора. 3. Обмотка «статора» генератора. Центральная шестерня дифференциала. 5. Водило. 6. Сателлиты. Вторая центральная шестерня. 8. Ведомый вал.
Рис.1
Вал двигателя 1 вращает ротор генератора 2 и водило 5 дифференциала. На водиле свободно установлены, но соединены между собой сателлиты 6, которые обкатываются по центральным колёсам 4 и 7. «Статор» 3, находящийся на общей оси с ротором, соединенный с центральным зубчатым колесом 4. Ротор и статор генератора – являются электрической машиной «двойного вращения». Центральное колесо 7 соединено с ведомым валом 8.
При вращении вала привода 1 от двигателя, вращается ротор генератора 2 и водило 5. Если есть нагрузка на ведомом валу 8, при определённом соотношении зубчатых пар дифференциала, ведомый вал будет вращаться в ту же сторону, что и вал двигателя 1 и водило 5. Тогда центральное зубчатое колесо 4 и статор генератора 3 будут стремиться вращаться в обратную сторону. При наличии в цепи генератора электрической нагрузки, водило будет увлекаться за ротором генератора, так как это происходит в электроиндукционной муфте, с силой пропорциональной этой токовой нагрузки, и будет частично блокировать дифференциал, что приведёт к его вращению вокруг своей оси за ротором генератора, замедлению скорости качения сателлитов по центральным колёсам, увеличению скорости вращения ведомого вала и к уменьшению величины крутящего момента. Сила сопротивления ведомого вала будет увеличивать скольжение между ротором и статором и торможению ведомого вала. Но при торможении ведомого вала увеличится качение сателлитов по центральным шестерням дифференциала, на ведомом валу увеличится крутящий момент, до величины, которая определяется соотношением размеров шестерён и сателлитов. При равновесии сил устанавливается вращение со скоростью соответствующей потребной величине крутящего момента. При увеличении или уменьшении мощности двигателя увеличится или уменьшится установившаяся величина скорости и крутящего момента на ведомом валу. При увеличении или уменьшении потребной для движения мощности, соответственно уменьшается или увеличивается скорость и увеличивается или уменьшается крутящий момент на ведомом валу. Если бы скольжения между ротором и статором не было, обороты вала двигателя и вала ведомого были бы одинаковыми, передаточное отношение трансмиссии было бы равно единице, а крутящий момент был бы равен крутящему моменту двигателя. Если на ведомом валу максимальная нагрузка – скорость минимальна, при этом крутящий момент максимальный, определяемый соотношением размеров шестерён дифференциала. Также соотношением размеров шестерён дифференциальной пары, соединенной со статором можно задать оптимальную величину крутящего момента для привода генератора.
У современного транспортного средства крутящий момент на приводном валу обеспечивается коробкой скоростей и на низшей передаче превышает крутящий момент на высшей передаче примерно в четыре, пять раз. Это соотношение обеспечивает разгон и движение автомобиля во всём диапазоне скоростей. Наиболее тяжелым по крутящему моменту является первая часть разгона от момента старта. Первая передача существует, чтобы, по возможности, максимально увеличить крутящий момент, главным образом для осуществления старта. В дальнейшем этот режим с максимально возможным крутящим моментом почти не применяется. Упростить устройство коробки скоростей, можно изменив устройство механизма сцепления. Фрикционную муфту можно включить в плечо блокирования планетарного дифференциала так, как это было предложено в предыдущей схеме. Схема механизма сцепления показана на Рис.2.
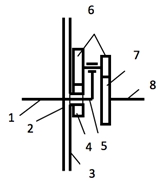
1.Вал привода от коробки скоростей. 2. Диск силовой муфты скольжения. 3. Ответный диск муфты. 4. Центральная шестерня дифференциала. 5. Водило. 6. Сателлиты. 7. Вторая центральная шестерня. 8. Ведомый вал.
Рис.2
Вал двигателя 1 вращает диск фрикционной, либо какой-либо иной силовой муфты скольжения 2 и водило 5 дифференциала. На водиле свободно установлены, но соединены между собой сателлиты 6, которые обкатываются по центральным колёсам 4 и 7. Ответный диск муфты 3, ,соединен с центральным зубчатым колесом 4. Центральное колесо 7 соединено с ведомым валом 8. При вращении вала привода 1 вращается диск муфты 2 и водило 5. Если есть нагрузка на ведомом валу 8, ведомый вал будет вращаться в ту же сторону, что и вал двигателя 1 и водило 5. Тогда центральное зубчатое колесо 4 и ответный диск силовой муфты скольжения 3 будут блокировать дифференциал, уменьшая передаточное отношение механизма. Пока происходит проскальзывание в муфте, на ведомом валу увеличится крутящий момент, так как часть энергии двигателя пойдет не через муфту, а через зубчатые пары дифференциала. При этом крутящий момент будет зависеть от выбранных параметров зубчатых пар. Муфта в данном случае будет только блокировать дифференциал. При полном блокировании на ведомом валу крутящий момент будет как на валу привода механизма. Удобным, вероятно, будет принять увеличение крутящего момента равным двум. Тогда при старте автомобиля на первой передаче крутящий момент возрастёт в восемь – десять раз, в чем нет необходимости и можно уменьшить максимальное передаточное отношение в механизме «генератор-дифференциал». Такой механизм сцепления можно применить и не в гибридных транспортных средствах. При этом в первой передаче не будет необходимости, а освободившийся диапазон изменения передаточного отношения трансмиссии можно перенести в сторону больших величин. Старт и разгон будут происходить более плавно и не столь напряженно, для механизма сцепления, как обычно, так как он нагружен только той составляющей мощности, которая включена в управляющее плечо дифференциала. В таком механизме сцепления будет происходить не только увеличение крутящего момента, но и увеличение передаточного отношения. Это облегчит и работу механизма сцепления и двигателя на этапе старта.
Гибридный автомобиль может включать приводные электромоторы, соединенные непосредственно со свободными колёсами.
Существует проблема согласования оборотов электромотора, которые для оптимальных режимов работы часто близки к постоянным, с изменяющимися в широких пределах, от нуля до величин соответствующих максимальной скорости движения, оборотами колеса. Кроме того сложно применить экономически выгодные типы электродвигатели, так как у экономичного, асинхронного электродвигателя низкий пусковой крутящий момент, а у наиболее экономичного – синхронного, пусковой момент отсутствует совсем. Но если включить в устройство электродвигателя дифференциал так, как показано на схеме, обороты его ротора от самого пуска будут близки к оптимальным, а на его валу будут изменяться в широких пределах. Это будет происходить без потери мощности и без пиковых токовых нагрузок, при оптимальном режиме работы. Главное преимущество такого электродвигателя – многократное увеличение крутящего момента на его валу при больших нагрузках, на малых скоростях вращения вала электродвигателя. Ни один управляющий пуском прибор не увеличивает его крутящий момент, а при прямом пуске, при увеличении тока в восемь – десять раз, его крутящий момент увеличивается только в 1,4 раза. При этом греются обмотки, разрушаются подшипники. На схеме на Рис.3 показано устройство электромотора с дифференциальным механизмом, обеспечивающим на валу многократное увеличение крутящего момента при увеличении нагрузки. Его тип может быть любым, в том числе и синхронным. При этом на валу крутящий момент при большой нагрузке будет многократно увеличиваться, обороты вала будут пропорционально уменьшаться, а на роторе электродвигателя крутящий момент останется оптимальным для данной конструкции при его работе на оптимальных оборотах. Получается, что в каждом электромоторе как бы имеется бесступенчатая, автоматическая коробка скоростей.
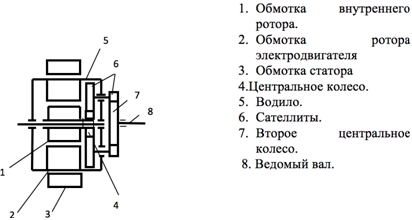
Рис.3
Внутри ротора 2 электродвигателя на общей оси установлен внутренний ротор 1, который индуктивно связан с ротором 2 и образует с ним электроиндукционную муфту, а также внутренний ротор 1 соединен с центральным колесом дифференциала 4. Ротор электродвигателя 2 установлен на водиле 5, на котором свободно установлены, но соединены между собой пары сателлитов 6, обращающиеся по центральным колёсам 4 и 7. Центральное колесо 7 соединено с ведомым валом 8.
Ротор электродвигателя 2, при взаимодействии с обмотками статора 3 вращается на установившихся оптимальных оборотах и вращает водило 5 дифференциала. Центральные колёса 4 и 7 при вращения водила должны вращаться в разные стороны: Колесо 7 в ту же сторону, что и ротор с водилом, а колесо 4 в обратную. Но колесо 4 соединено с внутренним ротором 1, который электроиндукционной силой увлекается за ротором 2, и частично блокирует дифференциал, уменьшая его передаточное отношение. При увеличении силы сопротивления на ведомом валу, центральное колесо 7 тормозится больше, скольжение между роторами увеличивается передаточное отношение увеличивается, сателлиты быстрее катятся вокруг центральных колёс и вращение центрального колеса 7 замедляется, а крутящий момент на ведомом валу увеличивается. Внутренний ротор может при достаточно большой тормозящей нагрузке на ведомом валу замедлить вращение до остановки относительно корпуса и даже вращаться в обратную сторону. При этом на ведомом валу будет максимальный крутящий момент. При уменьшении потребного крутящего момента на ведомом валу, его обороты увеличиваются, скольжение между роторами уменьшается, скорость вращения ведомого вала растёт, а крутящий момент на нём, соответственно падает. При старте автотранспортного средства обороты колеса, и связанного с ним вала электродвигателя равны нулю, но при этом не будет «короткого замыкания», как это происходит при эксплуатации электродвигателей. Не будет пиковых токовых нагрузок и потерь энергии. Ротор электродвигателя будет вращаться, а внутренний ротор будет вращаться в обратную сторону, создавая на валу электродвигателя максимально возможный крутящий момент для данных передаточных чисел дифференциала. Передаточные числа зубчатых пар дифференциала следует выбрать так, чтобы при равновесии сил, крутящий момент на ведомом валу был значительно выше, чем на внутреннем роторе. Схемы с дифференциалом такого типа, так называемым «механизмом Давида» выбраны в качестве примера. В принципе можно построить трансмиссию с любой зубчатой, либо какой-либо иной передачей.