СИСТЕМА УПРАВЛЕНИЯ УПОРНЫМ АКТИВНЫМ МАГНИТНЫМ ПОДШИПНИКОМ, КАК УЗЛОМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА
СИСТЕМА УПРАВЛЕНИЯ УПОРНЫМ АКТИВНЫМ МАГНИТНЫМ ПОДШИПНИКОМ, КАК УЗЛОМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА
Научная статья
Кузьмина Т.О.1, *, Стоцкая А.Д.2, Поляхов Н.Д.3
1 ORCID: 0000-0002-1485-837X;
2 ORCID: 0000-0003-2934-490X;
1, 2, 3 Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина) (СПбГЭТУ «ЛЭТИ»), Санкт-Петербург, Россия
* Корреспондирующий автор (taniasun1[at]mail.ru)
Аннотация
Данная работа посвящена разработке системы управления упорным активным магнитным подшипником (АМП) в условиях горизонтально ориентированного ротора с реализацией дифференциальной схемы управления по току. Разработанная система управления по току с ПД-регулятором позволяет учесть особенности конструкции упорного АМП. Для реализации математической модели и исследовательского комплекса для системы управления упорным АМП использован пакет математического моделирования Matlab. Разработанная система управления была верифицирована на основе параметров заводского магнитного подшипника, показав результаты, сходные с результатами реального объекта. Созданный исследовательский комплекс позволяет упростить разработку и реализацию систем управления высокоскоростной электрической машиной с электромагнитным подвесом ротора.
Ключевые слова: упорный активный магнитный подшипник, система управления, исследовательский комплекс.
CONTROL SYSTEM OF SUPPORTING ACTIVE MAGNETIC BEARING AS AN ELECTROMAGNETIC SUSPENSION NODE
Research article
Kuzmina T.O.1, *, Stotskaya A.D.2, Polyakhov N.D.3
1 ORCID: 0000-0002-1485-837X;
2 ORCID: 0000-0003-2934-490X;
1, 2, 3 St. Petersburg State Electrotechnical University “LETI” named after V.I. Ulyanov (Lenin) (St. Petersburg Electrotechnical University “LETI”), St. Petersburg, Russia
* Corresponding author (taniasun1[at]mail.ru)
Abstract
This work is devoted to the development of the suspension active magnetic bearing (AMB) control system in a horizontally oriented rotor with the implementation of a differential current control circuit. The developed current control system with two term controller allows taking into account the design features of the supporting AMB. The Matlab package of mathematical modeling was used to implement the mathematical model and research complex for the control of the supporting AMB. The developed control system was verified on the basis of the parameters of the factory magnetic bearing showing results similar to those of a real object. The created research complex allows simplifying the development and implementation of control systems for a high-speed electric machine with an electromagnetic rotor suspension.
Keywords: supporting active magnetic bearing, control system, research complex.
Активные магнитные подшипники (АМП) в современной технике широко применяются в высокоскоростных машинах, работающих в условиях, не допускающих использование традиционных подшипников c механическим контактом [1], [2].
Разработка несиловой части системы управления электромагнитным подвесом в отечественных компаниях производится силами зарубежных специалистов или по лицензии. Разработка и замена импортных технологий отечественными аналогами позволит сократить расходы на ремонт и настройку системы [3].
В данной работе рассматривается разработка системы управления упорным магнитным подшипником в условиях горизонтально ориентированного ротора с реализацией дифференциальной схемы управления по току, отличающейся тем, что предусматривается возможность предварительной настройки системы управления электромагнитным подвесом как автономно, так и в составе исследовательского комплекса.
Математическая модель и верификация системы управления
На Рисунке 1 приведена схема упорного АМП, где введены следующие обозначения: М1 и М2 – электромагниты; D – упорный диск массой m; δ – номинальный воздушный зазор; z – перемещение диска [4].
В данном случае используются два противоположно расположенных электромагнита, создающих две противоположно направленные магнитные силы притяжения F1 и F2. Помимо магнитных сил F1 и F2 на диск действует внешняя сила Q. Поскольку ротор ориентирован горизонтально, то действием силы тяжести можно пренебречь. Учитывая, что датчик положения расположен со стороны электромагнита М2, получим уравнение [5], [6]:
![]() (1)
(1)
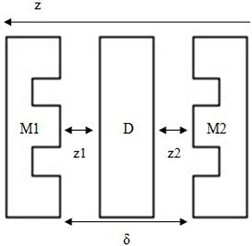
Рис. 1 – Схема упорного АМП
Для линеаризации магнитной силы в целях построения линейной системы управления необходимы токи смещения. Создаваемое ими магнитное смещение вызывает предварительный силовой натяг. Управление силой осуществляется за счёт увеличения натяга в одном направлении при одновременном его уменьшении в противоположном направлении [7].
Для магнитной силы, создаваемой каждым электромагнитом справедливо выражение:
![]() (2)
(2)
где F0 – магнитная сила, создаваемая электромагнитом при отсутствии тока управления ic;
cz – позиционная жёсткость;
hi – токовая жёсткость.
Магнитная сила F0 определяется выражением:
![]() (3)
(3)
где ib – ток смещения;
z0 – равновесное положение диска, при котором z=0 и ic=0;
cL – конструктивный параметр.
Конструктивный параметр определяется следующим образом:
![]() (4)
(4)
где Гн/м – магнитная постоянная;
N – количество витков обмотки;
А – площадь одного полюса.
Позиционная жёсткость определяется выражением:
![]() (5)
(5)
Токовая жёсткость определяется выражением:
![]() (6)
(6)
При этом для электромагнита M1 ток ![]() , воздушный зазор
, воздушный зазор ![]() ; для электромагнита М2 – ток
; для электромагнита М2 – ток ![]() , воздушный зазор
, воздушный зазор ![]() .
.
С учётом выражений (3), (5), (6) выражение (2) для каждой силы принимает следующий вид:
![]() (7)
(7)
![]() (8)
(8)
Принимая ![]() , из выражений (7) и (8) определяем изменение каждой магнитной силы:
, из выражений (7) и (8) определяем изменение каждой магнитной силы:
![]() (9)
(9)
![]() (10)
(10)
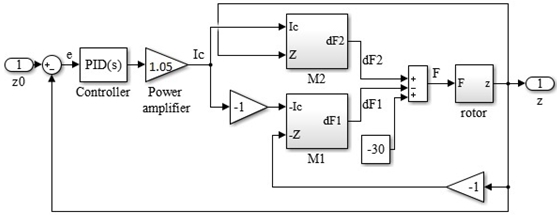
Рис. 2 – Структурная схема модели упорного АМП в Matlab/Simulink
Для верификации разработанной системы управления получены с помощью заводского оборудования графики управляющего тока и изменения перемещения ротора относительно положения равновесия, а также проведено моделирование на основе параметров реального объекта. Параметры заводского магнитного подшипника приведены в таблице 1.
Таблица 1 – Параметры упорного АМП
| Параметр | Значение |
| Количество витков в обмотке N | 464 |
| Площадь полюса А, м2 | |
| Масса диска m, кг | 230 |
| Ток смещения ib, А | 14 |
| Номинальный воздушный зазор δ, м |
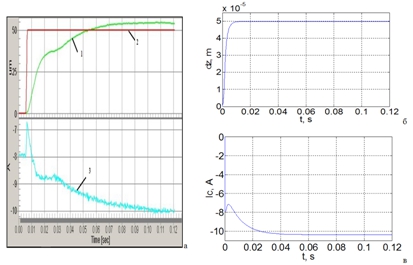
Рис. 3 – Графики верификации модели а) графики с заводского оборудования, б) график отклонения ротора от положения равновесия, в) управляющий ток
Графики, полученные на заводском оборудовании, на рис. 3а обозначены следующим образом: 1- график изменения отклонения ротора от равновесного положения, 2 – график изменения задающего воздействия, для изменения отклонения ротора от равновесного положения, 3 – ток управления.
Для моделирования реального объекта коэффициент усиления kamp усилителя мощности был выбран равным 1,05, а параметры регулятора [8] назначены следующие (в соответствии с реальными значениями) Kp= 73452.4, Ki=0, Kd=205.536, Kf=46666.7.
Различия в быстродействии систем обусловлено идеализацией датчиков модели.
Исследование влияния внешних воздействий
Одной из важных характеристик, влияющих на систему управления упорным АМП, является внешнее воздействие. Результаты моделирования системы при увеличении внешнего воздействия приведены на рисунке 4.
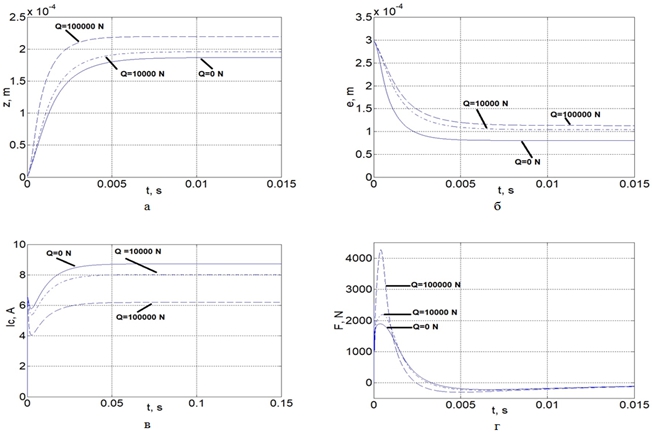
Рис. 4 – Результаты моделирования системы при увеличении внешнего воздействия а) изменение перемещения, б) изменение ошибки регулирования, в) изменение управляющего тока, г) изменение результирующей магнитной силы
Динамика переходных процессов, представленных на рис.4, носит на завершающей стадии экспоненциальный характер.
Исходя из полученных результатов, для спроектированной системы с заводскими параметрами максимальная величина отрабатываемого внешнего воздействия составляет 10 кН.
Исследовательский комплекс для системы управления упорным АМП
Для решения задач расчёта модели упорного АМП и визуализации результатов моделирования системы управления упорным активным магнитным подшипником разработана программа для ЭВМ «Программа для моделирования системы управления упорным активным магнитным подшипником (АМП)» [9]. Разработанная программа в совокупности с созданной в Matlab/Simulink системой управления образует исследовательский комплекс для моделирования систем управления упорным АМП при различных конструкционных параметрах АМП [10] и различных внешних воздействиях.
Основное окно программы «Программа для моделирования системы управления упорным активным магнитным подшипником (АМП)» (рисунок 5) содержит следующие элементы:
- Меню Help.
- Область ввода параметров системы управления упорным магнитным подшипником:
- количество витков обмотки;
- площадь полюса;
- масса диска (ротора);
- ток смещения;
- номинальный воздушный зазор;
- внешнее возмущение;
- время моделирования.
- Кнопки управления:
- Изменить параметры;
- Начать моделирование;
- Выйти.
- Поле выбора графика, который необходимо построить:
- перемещение диска (z);
- ошибка (e);
- управляющий ток (Ic);
- токовая жёсткость электромагнита М1 (hi1);
- токовая жёсткость электромагнита M2 (hi2);
- позиционная жёсткость электромагнита M1 (cz1);
- позиционная жёсткость электромагнита М2 (cz2);
- изменение магнитной силы электромагнита M1 (dF1);
- изменение магнитной силы электромагнита М2 (dF2);
- результирующая сила (F).
- Поле вывода выбранного пользователем графика.
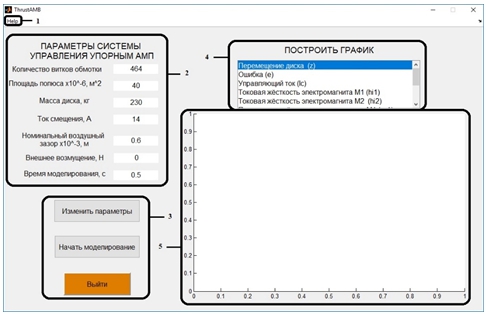
Рис. 5 – Основное окно программы
Программа обладает простым и удобным интерфейсом позволяющим осуществлять моделирование систем управления упорным АМП при различных конструкционных параметрах АМП и различных внешних воздействиях.
Заключение
Разработанная система управления упорным активным магнитным подшипником в условиях горизонтально ориентированного ротора с реализацией дифференциальной схемы управления по току была верифицирована на основе параметров заводского магнитного подшипника, показав результаты, сходные с результатами реального объекта, что позволяет утверждать, что разработанная в Matlab/Simulink структурная схема модели упорного АМП может быть использована для предварительной настройки системы управления электромагнитным подвесом как автономно, так и в составе исследовательского комплекса. Исследования разработанной системы управления показали, что для эффективного управления целесообразно использовать ПД-регулятор. Разработанный исследовательский комплекс позволяет осуществлять моделирование систем управления упорным АМП при различных конструкционных параметрах АМП и различных внешних воздействиях, что в свою очередь позволяет упростить разработку и реализацию систем управления высокоскоростной электрической машиной с электромагнитным подвесом ротора.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Стоцкая А. Д. О робастности селективного регулятора положения ротора в электромагнитном подвесе/ А.Д. Стоцкая, Т. О. Кузьмина // Известия СПбГЭТУ «ЛЭТИ», Автоматизация и управление– 2015 – №1 – с.51-58.
- Schweitzer, G. Magnetic Bearings. Theory, Design, and Applicationton Rotating Machinery // G. Schweitzer, E.H. Maslen. – Springer-Verlag Berlin Heidelberg, 2009. – pp 1-24.
- Панкратьев Д. А. Разработка блока питания системы управления активным магнитным подвесом /Панкратьев Д.А., Кузьмина Т. О.// Материалы III Всероссийской научно-технической конференции молодых ученых, аспирантов и студентов «Интеллектуальные системы, управление и мехатроника – 2017» (ИСУМ-2017) – Севастополь, 2017 – c.142-146.
- Поляхов Н. Д. Разработка и исследование системы управления упорным магнитным подшипником./ Н.Д. Поляхов, Т. О. Кузьмина, А. Д. Стоцкая и др.// Автоматика и программная инженерия. 2017, №3 (21), c. 54-58.
- Polyakhov N.D. Mathematical Model of the Complete Electromagnetic Rotor Suspension/ N.D. Polyakhov, A.D. Stotckaia, T.O. Kuzmina// Procedia engineering – 2016. – 150 – pp. 571-578.
- Кузьмина Т. О. Применение нечёткой логики для управления упорным активным магнитным подшипником/Кузьмина Т. О.// Сборник трудов Всероссийской научно-технической конференции молодых ученых, аспирантов и студентов «Интеллектуальные системы, управление и мехатроника − 2016» (ИСУМ-2016) –Севастополь, 2016. – c.501-505.
- Журавлев Ю. Н. Активные магнитные подшипники: Теория, расчет, применение./ Ю. Н. Журавлев// – СПб.: Политехника, 2003. – 206 с.
- Chiba A. Magnetic bearings and bearingless drives /A. Chiba, T. Fukao, O. Ichikawa and others//– Elsevier, 2005. – pp. 45-80.
- Кузьмина Т. О. Программа для моделирования системы управления упорным активным магнитным подшипником (АМП) / Кузьмина Т. О., Стоцкая А.Д. // Свидетельство о государственной регистрации программы для ЭВМ №2017663088, дата регистрации 24.11.2017.
- Кузьмина Т. О. Особенности моделирования упорного активного магнитного подшипника/ Кузьмина Т.О., Стоцкая А. Д. // Навигация и управление движением. Материалы ХVШ конференции молодых ученых «Навигация и управление движением» с международным участием. СПб.: ГНЦ РФ АО «Концерн «ЦНИИ «Электроприбор» - Санкт-Петербург, 2016. – стр. 452 – 456.
Список литературы на английском языке / References in English
- Stotckaia A. D. O robastnosti selektivnogo reguljatora polozhenija rotora v elektromagnitnom podvese [About robustness properties of selective position controller for rotor in an electromagnetic suspension]/ A. D. Stotckaia, T. O. Kuzmina // Izvestiya SPbGETU "LETI", Avtomatizacija i upravlenie [Izvestiya SPbGETU "LETI", Automation and control]– 2015 – №1 – pp.51-58. [in Russian]
- Schweitzer, G. Magnetic Bearings. Theory, Design, and Applicationton Rotating Machinery // G. Schweitzer, E. H. Maslen. – Springer-Verlag Berlin Heidelberg, 2009. – pp 1-24.
- Pankrat'ev D. A. Razrabotka bloka pitanija sistemy upravlenija aktivnym magnitnym podvesom [Development of a power supply unit for an active magnetic suspension control system] /Pankrat'ev D.A., Kuzmina T.O.//– Materialy III Vserossijskoj nauchno-tehnicheskoj konferencii molodyh uchenyh, aspirantov i studentov «Intellektual'nye sistemy, upravlenie i mehatronika – 2017» (ISUM-2017) [Materials of the III All-Russian Scientific and Technical Conference of Young Scientists, Postgraduates and Students "Intellectual Systems, Control and Mechatronics - 2017" (ISCM-2017)] - Sevastopol, 2017. – pp. 142-146. [in Russian]
- Polyakhov N. D. Razrabotka i issledovanie sistemy upravlenija upornym magnitnym podshipnikom [Development and research of a thrust magnetic bearing control system]./ N .D. Polyakhov, T.O. Kuzmina, A.D. Stotckaia and others // Avtomatika i programmnaja inzhenerija [Automatics & Software Enginery]. 2017, №3 (21), pp. 54-58. [in Russian]
- Polyakhov N. D. Mathematical Model of the Complete Electromagnetic Rotor Suspension/ N. D. Polyakhov, A. D. Stotckaia, T.O. Kuzmina// Procedia engineering – 2016. – 150 – pp. 571-578.
- Kuzmina T. O. Primenenie nechjotkoj logiki dlja upravlenija upornym aktivnym magnitnym podshipnikom [Application of fuzzy logic to control a thrust active magnetic bearing]/Kuzmina T. O.// Sbornik trudov Vserossijskoj nauchno-tehnicheskoj konferencii molodyh uchenyh, aspirantov i studentov «Intellektual'nye sistemy, upravlenie i mehatronika − 2016» (ISUM-2016) [Collection of works of the All-Russian scientific and technical conference of young scientists, graduate students and students "Intellectual systems, control and mechatronics-2016" (ISCM-2016)]– Sevastopol, 2016. – pp.501-505. [in Russian]
- Zhuravlyov Yu. N. Aktivnye magnitnye podshipniki: Teorija, raschet, primenenie.[ Active Magnetic Bearings: theory, design, applications]/ Yu. N. Zhuravlyov// – SPb.: Politehnika, 2003. – 206 p. [in Russian]
- Chiba A. Magnetic bearings and bearingless drives /A. Chiba, T. Fukao, O. Ichikawa and others //– Elsevier, 2005. – pp. 45-80.
- Kuzmina T. O., Stotckaia A. D. Programma dlja modelirovanija sistemy upravlenija upornym aktivnym magnitnym podshipnikom (AMP) [Program for modeling a thrust active magnetic bearing (AMB) control system] / Kuzmina T. O., Stotckaia A. D // Certificate of state registration of computer programs №2017663088, date of registration: 24.11.2017. [in Russian]
- Kuzmina T. O. Osobennosti modelirovanija upornogo aktivnogo magnitnogo podshipnika [Features of а thrust active magnetic bearing modelling]/ Kuzmina T. O., Stotckaia A. D. // Navigacija i upravlenie dvizheniem. Materialy HVSh konferencii molodyh uchenyh «Navigacija i upravlenie dvizheniem» s mezhdunarodnym uchastiem. SPb.: GNC RF AO «Koncern «CNII «Elektropribor» [Navigation and motion control. Proceedings of the XVIIIth Conference of Young Scientists “Navigation and Motion Control” with international participation. SPb .: SSC RF Concern Central Research Institute Electropribor] – Saint Petersburg, 2016. – pp. 452 – 456. [in Russian]