СИСТЕМА ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ГРАНУЛИРОВАННЫХ УДОБРЕНИЙ
СИСТЕМА ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ГРАНУЛИРОВАННЫХ УДОБРЕНИЙ
Научная статья
Юнин В.А.1, *, Зыков А.В.2, Захаров А.М.3, Перекопский А.Н.4
1 ORCID: 0000-0002-8111-1727;
2 ORCID: 0000-0002-3435-7468;
3 ORCID: 0000-0003-3501-0543;
4 ORCID: 0000-0003-0998-2306;
1, 2, 3, 4 Институт агроинженерных и экологических проблем сельскохозяйственного производства – филиал ФНАЦ ВИМ, Санкт-Петербург, Россия
* Корреспондирующий автор (vim_iaep[at]mail.ru)
АннотацияДифференцированное внесение удобрений – это процесс, позволяющий изменять норму внесения удобрений в зависимости от состояния отдельных участков поля, различающихся содержанием питательных веществ. Данная операция разрабатывается и исследуется с системой мониторинга на основе GPS, которая состоит из системы позиционирования, микропроцессора, микроконтроллера, привода двигателя с постоянным источником тока, блока питания, механизма преобразования энергии из электрического сигнала в механический и механизма дозирования в виде ролика с пазами. Были проанализированы цифровые карты наличия и использования питательных веществ в почве для операции точного внесения удобрений. Система позиционирования используется с идентификационной сеткой на карте в реальном времени. Основываясь на алгоритме микроконтроллера, норма внесения изменяется путем подачи воздействия на вращение ролика. Исследования процесса дифференцированного внесения показывают, что допустимые пределы внесения отличаются от предписанной нормы, на поле-сетке с неравномерностью в 15%. Можно сделать вывод, что разрабатываемая система дифференцированного внесения удобрений в первом приближении соответствует целевой норме внесения удобрений для выбранного участка поля.
Ключевые слова: дифференцированное внесение удобрений, система позиционирования, микроконтроллер, карта питательных веществ почвы.
VARIABLE RATE APPLICATION SYSTEM OF PELLETED FERTILIZERS
Research article
Yunin V.A.1*, Zykov A.V.2, Zakharov A.M.3, Perekopskii A.N.4
1 ORCID: 0000-0002-8111-1727;
2 ORCID: 0000-0002-3435-7468;
3 ORCID: 0000-0003-3501-0543;
4 ORCID: 0000-0003-0998-2306;
1, 2, 3, 4 Institute for Engineering and Environmental Problems in Agricultural Production – Branch of Federal Scientific Agroengineering Center Vim (FSAC VIM), Saint Petersburg, Russia
*Corresponding author (vim_iaep[at]mail.ru)
AbstractVariable-rate application of fertilizers is the process that allows changing fertilizer application rate depending on the state of particular field zones that differ in the nutrient content. This operation is developed and studied with a GPS-based monitoring system, which consists of a positioning system, a microprocessor, a microcontroller unit, a constant-current motor drive, a power supplier, a mechanism for converting energy from an electric signal to a mechanical signal, and a dosing mechanism in the form of a mortise roller. We analysed digital maps of the availability and usage of soil nutrients for precise fertilization operations. The positioning system is used with a real-time map identification grid. Based on the microcontroller unit algorithm, the application rate is changed through the influence on the roller rotation. Research of the variable rate application process demonstrates that the acceptance limits differ from the prescribed rate, on the grid field with 15% inconsistency. We can conclude that the designed system of variable rate application of fertilizers at a first approximation complies with the target rate of fertilizer application for the selected field zones.
Keywords: variable rate application of fertilizers, positioning system, microcontroller unit, soil-nutrient map.
Содержание питательных веществ в почве далеко не всегда одинаково даже в пределах одного поля. Исследования ученых показывают, что существует высокая разность питательных веществ в почве даже на небольшом участке поля [1]. Традиционный метод внесения удобрений заключается в распределении удобрений по всему полю в соответствии со средней потребностью определённой культуры [2]. Постоянная норма внесения удобрений без точного анализа поля является низкоэффективной, так как не удовлетворяет фактической потребности в питательных веществах отдельных участков поля. Увеличение нормы внесения удобрений в целом увеличивает урожайность до оптимального уровня, но сверх нормы – удобрение используется неэффективно [3]. На основании анализа информации о состоянии поля способ внесения удобрений может быть различным. Технология с методом дифференцированного внесения удобрении, как минеральных, так и органических, в гранулированной форме – это метод повышения экономической эффективности использования ресурсов, а также снижения экологической нагрузки на агроэкосистему сельскохозяйственного предприятия в целом. Использование системы дифференцированного внесения для конкретного поля может помочь повысить эффективность использования техники, а также уменьшить негативное влияние на окружающую среду из-за чрезмерного применения удобрении и проходов техники.
Снижение вносимой дозы удобрении в растениеводстве является серьезной проблемой в современном сельском хозяйстве. До настоящего времени способ дифференцированного внесения не был успешно внедрен из-за дополнительных капитальных вложений, связанных с доработкой существующей сельскохозяйственной техники и отсутствием недорогого комплектующего оборудования. Кроме того, чрезмерное внесение удобрений может вызвать рост активизации микробиологических процессов в почве и иметь негативные экологические последствия, приводя к ухудшению физико-химических и биологических свойств почвы.
В сельском хозяйстве различают три основных способа внесения удобрений: основное (допосевное); припосевное (рядковое) и припосадочное, а по способу заделки удобрений: разбросной; локальный – в рядки, гнезда или лунки; локально-ленточный. Все эти способы основываются на принятии решения для получения максимальной урожайности культуры с определением начальных норм внесения удобрении, дифференцированный способ используемый в сочетании с системой позиционирования, является обычной практикой, применяемой теми, кто использует GPS мониторинг и контроль топлива для сельскохозяйственной техники. Первым этапом для развития системы дифференцированного внесения удобрений является определение питательных веществ на конкретном поле, разбитом на сектора. Это может быть достигнуто с помощью дистанционного зондирования поля, спектроскопии, измерения урожая и почвы в режиме реального времени. ИК-спектроскопия была бы пригодна для определения органического вещества почвы, органического углерода и влажности почвы. Метод определения спектральной отражательной способности почвы и питательных веществ для сельскохозяйственных культур находится в стадии разработки и, следовательно, является непроверенным и дорогостоящим [4].
Для теоретической проработки и предварительных экспериментов был сформирован приближенный к реальности массив данных по содержанию фосфора (P) и калия (K) в почве на карте поле.
Карта поля с географической привязкой вместе с системой позиционирования позволяет в реальном времени работать с системой идентифицирующей местоположения и является ключом к управлению дифференцированного внесения удобрении. Необходимая норма внесения с точным дозированием гранулированного органического удобрения является наиболее важным критерием для операции внесения. Во всем мире фермеры чаще всего используют разбрасыватели, различных форм удобрений, с фиксированной скоростью [5, 6]. Обычные посевные и посадочные машины не могут быть использованы для решения проблем, связанных с точным внесением, поэтому была предпринята попытка разработать систему на основе цифровых карт, которая могла бы идентифицировать почвенную зону с помощью GPS и изменять норму внесения в поле в соответствии с потребностью почвы в питательной среде в конкретной точке сетки поля.
Система на основе цифровой карты разрабатывается для внесения необходимого количества удобрений в определенной зоне поля. На рисунке 1 показана концептуальная схема разрабатываемой системы на основе цифровых карт.
Монтируемая на тракторе система состоит из системы позиционирования, микропроцессора, микроконтроллера, двигателя постоянного тока, аккумуляторной батареи 12 В, механизма преобразования энергии из электрического сигнала в механическое воздействие и механизма дозирования в виде ролика с пазами. Система будет основываться на карте содержания азота в почве, которая представляет собой цифровой файл данных, содержащий конкретную информацию о широте и долготе.
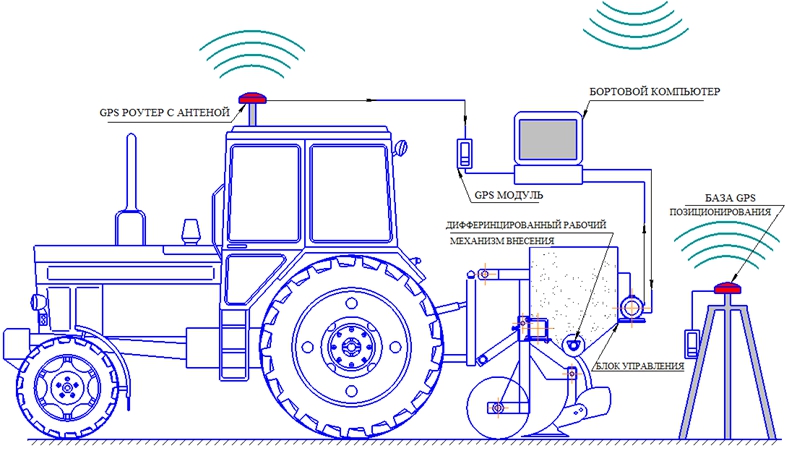
Рис. 1 – Концептуальная схема дифференцированного внесения удобрений на основе цифровой карты
Первый шаг к формированию массива данных – это оценка содержания питательных веществ в почве и внесение данных в электронную карту. Используя метод выборки из систематической сетки, при котором опытный участок поля делиться на равные участки размером 2 х 2 (1 х 1) метра, для конкретного сельскохозяйственных предприятия, в зависимости от площади поля. В общей сложности для опытного участка площадью 0,1 га необходимо отобрать 50 образцов с географической привязкой с использованием позиционирования GPS и проанализировать в лаборатории на содержание азота в почве. Уровень питательных веществ в отобранных точках на поле будет рассчитан с использованием метода средних значений. Составленная цифровая карта содержания питательных веществ в почве с соответствующими координатами выбранного поля создается с использованием виртуального кода (рисунок 2). После разработки карты с содержанием азота, на карту наносят сетку с ячейками размером 2 x 2 (1 х 1) метра. Координаты каждой пробы сети вместе с состоянием азота берутся из цифровой карты. Норма внесения удобрении для каждой координатной точки рассчитывается на основе целевой потребности в питательных веществах.
С помощью программы моделирования будет сгенерирована прикладная карта на основе целевого урожая, основанная на анализах содержания веществ в почве с соответствующей широтой и долготой выбранного поля. Будет набран массив данных (рисунок 3) для дальнейшей загрузки в программу анализа.
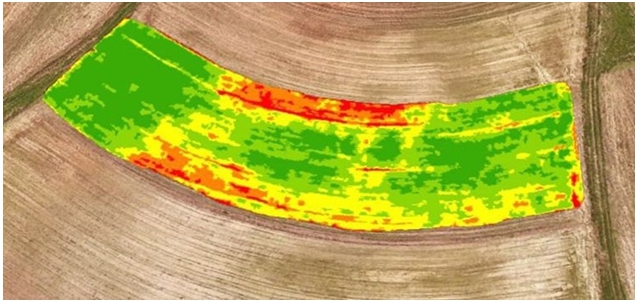
Рис. 2 – Карта содержания питательных веществ (азота) почвы
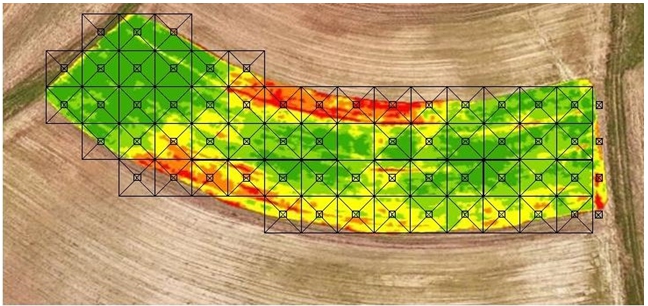
Рис. 3 – Карта содержания питательных веществ с разбивкой на участки 2 х 2 (1 х 1) метра
Изменение нормы внесения удобрений будет достигаться путем изменения длины воздействия ролика с пазами через потенциометр. Дозатор будет напрямую зависеть от скорости движения трактора. При внесении удобрении агротехнические требования по скорости движения варьируются от 5 км/ч. до 15 км/ч. Переменная скорость будет получена путем изменения длины активного подающего ролика дозирующего приводного вала.
На рисунке 4 показана блок-схема системы управления. Разработанная система синхронизируется с GPS приемником, микропроцессором, микроконтроллером, приводом и механизмом учета с использованием визуальной студийной платформы. Примерная стоимость внесения удобрений с контроллером составила 60 тыс. рублей. Система отслеживает местоположение агрегата для внесения удобрений и изменяет скорость по сигналам GPS находящемся на агрегате. Эта система контролирует скорость подачи удобрений посредством комбинации длины воздействия механизма дозирования удобрений и данных предписаний, которые были предоставлены заранее определенной программой. Как только сетка идентифицирована, программное обеспечение отправило сигнал в виде цифрового значения на микроконтроллер через последовательный порт.
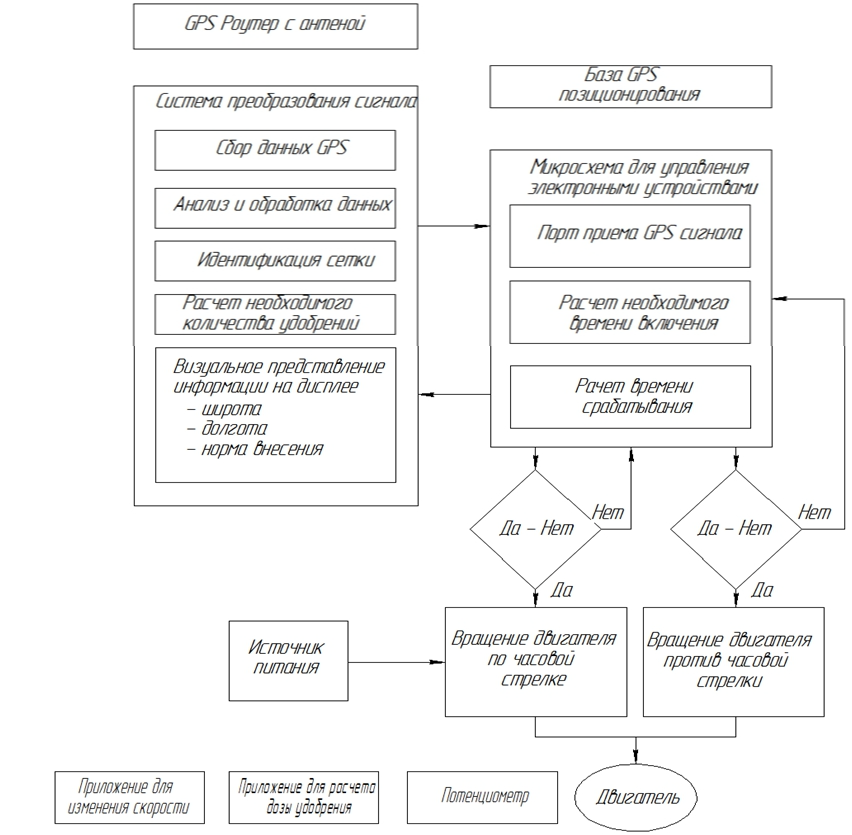
Рис. 4 – Блок-схема системы управления дифференцированным внесением удобрений
Разработанная система может быть применена для различных норм внесения удобрений. Проверку работоспособности агрегата, в дальнейшем, планируется производить путем сбора удобрении в каждой контрольной точке поля в полиэтиленовые пакеты, взвешивать и измерять фактическую и заданную норму внесения.
Система на основе карт будет разрабатываться и оцениваться для применения на конкретном удобрении. Точность внесения удобрений для систем точного земледелия должна варьироваться от 89% до 98% при различных расходах. Среднеквадратическая ошибка и коэффициент вариации на разных уровнях применения должен вписываться в пределы от 1,3 до 4,6 и от 1,75 до 6,56 соответственно. Разработанная система должна быть эффективной и точной, чтобы реагировать на целевые нормы внесения с небольшой задержкой во времени. Система должна соответствовать целевой норме внесения удобрений с отклонением до 15% для разрешения сетки 2 x 2 м. Дифференцированная система, доработанная микроконтроллером и приводом, может быть интегрирована во все типы сеялок и разбрасывателей удобрений, найдя широкое применение на полях как крупных, так и малых предприятий.
Существуют некоторые ограничения в отношении разрабатываемой системы. Высокая стоимость GPS-приемников, которая может быть снижена путем замены устройств локальной системой позиционирования или датчиками питательных веществ почвы в режиме реального времени. Система, основанная на карте предприятия, также может быть разработана для внесения жидких удобрений с использованием жидкостного дозатора с регулируемой скоростью агрегата и клапана управления потока на основе аналогового сигнала. Один и тот же интерфейс разрабатываемой системы может использоваться с некоторыми модификациями в блоке программирования и управления микроконтроллера.
| Конфликт интересов Не указан. | Conflict of Interest None declared. |
Список литературы / References
- Зыков А.В. Перспективы развития машинной технологии производства картофеля в Северо-Западном регионе РФ / А.В. Зыков, А.М. Захаров // Международный научно-исследовательский журнал. 2019. № 6-1 (84). С. 48-51.
- Зыков А.В. Использование робототехнических средств в АПК. / А.В. Зыков, В.А. Юнин, А.М. Захаров // Международный научно-исследовательский журнал. 2019. № 3 (81). С. 8-11.
- Перекопский А.Н. Варианты внесения органических удобрений в биологизированном севообороте / А.Н. Перекопский, А.М. Захаров // Journal of Advanced Research in Technical Science. 2020. № 18. С. 61-63.
- Агрохимия. Учебник/В.Г. Минеев, В.Г. Сычев, Г.П. Гамзиков и др.; под ред. В.Г. Минеева. — М.: Изд-во ВНИИА им. Д.Н. Прянишникова, 2017. — 854 с.
- Фомин И.М., Адаптация технико-технологических решений в картофелеводстве к условиям сельхозпроизводителя /И.М. Фомин, А.Н. Васильев, А.М. Захаров // Сельскохозяйственные машины и технологии. 2011. № 5. С. 24-25
- Фомин И.М., Механизированная технология производства экологически чистого картофеля / И.М. Фомин, Е.Е. Орешин, Г.А. Логинов, А.М. Захаров // В сборнике: Экология и сельскохозяйственные технологии: агроинженерные решения. материалы 7-й Международной научно-практической конференции. 2011. С. 141-146.
Список литературы на английском языке / References in English
- Zykov A.V. Perspektivy` razvitiya mashinnoj texnologii proizvodstva kartofelya v Severo-Zapadnom regione RF [Prospects for the development of machine technology for potato production in the North-Western region of the Russian Federation] / A.V. Zykov, A.M. Zaxarov // Mezhdunarodny`j nauchno-issledovatel`skij zhurnal [International research journal]. 2019. № 6-1 (84). P. 48-51. [in Russian]
- Zykov A.V. Ispol`zovanie robototexnicheskix sredstv v APK [Use of robotic tools in agriculture]/ A.V. Zykov, V.A. Yunin, A.M. Zaxarov // Mezhdunarodny`j nauchno-issledovatel`skij zhurnal [International research journal]. 2019. № 3 (81). P. 8-11. [in Russian]
- Perekopskij A.N. Varianty` vneseniya organicheskix udobrenij v biologizirovannom sevooborote [Options for applying organic fertilizers in biologized crop rotation]/ A.N. Perekopskij, A.M. Zaxarov // Journal of Advanced Research in Technical Science. 2020. № 18. P. 61-63. [in Russian]
- Agroximiya [Agrochemistry] Uchebnik/V.G. Mineev, V.G. Sy`chev, G.P. Gamzikov et al.; pod red. V.G. Mineeva. — M.: Publishing house VNIIA im. D.N. Pryanishnikova, 2017. — 854 p. [in Russian]
- Fomin I.M., Adaptaciya texniko-texnologicheskix reshenij v kartofelevodstve k usloviyam sel`xozproizvoditelya [Adapting technological solutions to the conditions of the potato farmers] /I.M. Fomin, A.N. Vasil`ev, A.M. Zaxarov // Sel`skoxozyajstvenny`e mashiny` i texnologii. 2011. № 5. P. 24-25[in Russian]
- Fomin I.M., Mexanizirovannaya texnologiya proizvodstva e`kologicheski chistogo kartofelya [Mechanized technology of production of environmentally friendly potatoes]/ I.M. Fomin, E.E. Oreshin, G.A. Loginov, A.M. Zaxarov // V sbornike: E`kologiya i sel`skoxozyajstvenny`e texnologii: agroinzhenerny`e resheniya. materialy` 7-j Mezhdunarodnoj nauchno-prakticheskoj konferencii. 2011 [In the book: Ecology and farming technologies: agro-engineering solutions. materials of the 7th International scientific and practical conference]. P. 141-146. [in Russian]