РАЗРАБОТКА СИСТЕМЫ ДИАГНОСТИКИ СОСТОЯНИЯ ВОРОТ НА СУДОХОДНЫХ ШЛЮЗАХ
Бочкарев А.В.1, Мельников Е.В.2
1 ORCID: 0000-0003-1615-5659, студент, 2 Кандидат технических наук, Самарский государственный технический университет
Работа выполнена при поддержке гранта Всероссийского конкурса молодежных проектов 2015.
РАЗРАБОТКА СИСТЕМЫ ДИАГНОСТИКИ СОСТОЯНИЯ ВОРОТ НА СУДОХОДНЫХ ШЛЮЗАХ
Аннотация
В статье представлен способ контроля повышенной точности за состоянием ворот судоходных шлюзов и описано применяемое для его реализации устройство, которые, при внедрении на реально действующий шлюз, помогут существенно снизить риски возникновения серьезных неисправностей в эксплуатируемой конструкции.
Ключевые слова: судоходный шлюз, створка, энкодер, прецессия оси.
Bochkarev A. V.1, Melnikov E.V.2
1 ORCID: 0000-0003-1615-5659, Student, 2 ORCID: 0000-0000-0000-0000, PhD in Engineering, Samara State Technical University
DEVELOPMENT OF DIAGNOSTIC STATE GATE AT THE NAVIGATION LOCK
Abstract
The article considers a method for monitoring the condition of high accuracy navigation locks gate and described device applied to it that the introduction to the actual current gateway can help to significantly reduce the risk of serious faults in the exploited gate.
Keywords: navigation lock, flap, the encoder, the precession of the axis.
В настоящее время в России активно ведутся работы, связанные с реконструкцией водного пути страны, которые не имели место последние 30 лет. Следствием этого является катастрофическое состояние инфраструктуры водного транспорта: более 70% которой не отвечает действующим стандартам безопасности судоходства. Наиболее неудовлетворительным признано состояние судоходных шлюзов. Только 10% шлюзов имеют современные системы судопропуска и отвечают всем требованиям по эксплуатации гидросооружений.
Одной из важных составляющих правильной эксплуатации шлюза, является система контроля положения двустворчатых распашных ворот камеры шлюза, которые представляют собой сложную конструкцию, работающую под воздействием больших знакопеременных нагрузок, создаваемых силовыми гидроцилиндрами гидропривода.
Ось вращения ворот представляет собой вереяльный столб, фиксируемый сферическим подпятником снизу и хомутом, один из концов которого вмурован в стену в непосредственной близи вереяльного столба, а другой обхватывает его шейку около крайней верхней точки. Такой хомут именуется гальсбант. Натяжение между стеной и шейкой столба в нем регулируется, что позволяет настраивать характеристики процесса створения ворот с заданной точностью.
При использовании данной схемы конструкции всякой створки двустворчатых ворот шлюза требуется вести постоянный (порядка одного-двух раз в месяц) контроль степени натяжения гальсбантов. Кроме того, ослабление гальсбанта вызывает наклон вереяльного столба и, как следствие, всей створки.
При несвоевременной регулировке гальсбанта происходит ускоренный износ креплений, что может привести к разрушению конструкций шлюза и длительному дорогостоящему ремонту с остановкой судоходства на несколько месяцев. Помимо этого, отклонение вереяльного столба, вызванное ослаблением натяжения между шейкой столба и концом гальсбанта, вмурованным в стену, добавляет погрешность при расчете положения створки ворот в пространстве, при использовании традиционных, на сегодняшний день, способов измерения угла поворота створки. Под традиционными подразумеваются способы, полагающие, что ось вращения каждой из створок не претерпевает вращения вокруг центральной точки подпятника, служащего нижним креплением вереяльного столба. Следствием этого пренебрежения является допущение, что плоскость, в которой устанавливаются некоторые измерительные устройства для определения угла поворота створки ворот, также не претерпевает никаких вращении, поворотов и наклонов.
Из таких, традиционных, способов позиционирования створок двустворчатых ворот шлюза известен способ, осуществляемый с помощью абсолютного линейного энкодера, что и позволяет найти угол поворота створки двустворчатых ворот шлюза.
Явным недостатком такого метода можно считать наличие в местах крепления таких явлений как сухое трение, люфт, причем проявляющиеся стохастически. Это, наряду с отсутствием учета наклона оси вращения створки, вызывает погрешность в позиционировании створки, не давая избегать створений с ударом.
Известен также метод, предполагающий преобразовывать угол поворота створки с помощью использования единственного датчика абсолютных угловых перемещений (как механического, так и цифрового) в сигнал, позволяющий позиционировать створку в пространстве.
Такой метод имеет явный недостаток – при наклоне вереяльного столба будет не только создаваться погрешность от отсутствия учета угла его наклона, но этот же наклон может способствовать ускорению износа и, как следствие, выхода из строя самого датчика угла поворота.
Другой известный метод основан на использовании двух абсолютных угловых энкодеров и одного абсолютного линейного энкодера. Такой способ не позволяет учитывать наклон вереяльного столба во всех возможных направлениях, что также налагает погрешность на выходные данные, используемые для организации безударного створения створок двустворчатых ворот шлюза и не исключает износа креплений конструкции, могущих стать причиной трудновыполнимого дорогостоящего ремонта [2].
Из всего вышесказанного следует, что для безударного створения ворот требуется иной метод определения положения в пространстве створок двустворчатых ворот шлюза, предполагающий учет возможного отклонения вереяльного столба с дальнейшей корректировкой пространственных характеристик каждой из створок во всякий момент процесса створения\открытия ворот.
Предлагаемый способ контроля каждой из створок двустворчатых ворот заключается в полном определении в пространстве створок двустворчатых ворот шлюза относительно центра вращения вереяльного столба при его отклонении от нормального положения с использованием двух абсолютных угловых энкодеров и одного абсолютного линейного энкодера.
Для исполнения такого метода требуется знать некоторые константы, находимые эмпирическим путем во время монтажа устройства.
Способ реализуется посредством устройства, которое включает в себя два абсолютных линейных энкодера и один абсолютный угловой. Устройство монтируется во время створенного положения двустворчатых ворот, при этом корпус одного из абсолютных угловых энкодеров устанавливается на жестко закрепленном на поворотной створке двустворчатых ворот шлюза штанговом креплении, находящимся непосредственно над крайней верхней точкой оси вращения створки (оставляя зазор между этой точкой и креплением, дабы избежать их взаимного сухого трения) таким образом, чтобы окружности, составляющие основания цилиндров вереяльного столба и вала абсолютного углового энкодера соответственно, были концентричны; второй абсолютный угловой энкодер располагают в одной горизонтальной плоскости с первым абсолютным угловым энкодером, закрепив жестко к некоторой близлежащей стене, вал второго абсолютного углового энкодера направлен вверх; абсолютный линейный энкодер шарнирными креплениями в обоих случаях соединяют с первым и вторым угловыми энкодерами, при чем корпус абсолютного линейного энкодера крепится с абсолютным угловым энкодером, жестко закрепленным на стене, а измерительный шток – с энкодером на вереяльном столбе таким образом, что шарнирное соединение позволяет абсолютному линейному энкодеру изменять угол наклона относительно горизонтальной плоскости. На основе данных, полученных с датчиков, определяем положение верхней точки вереяльного столба, в которой установлен первый абсолютный угловой энкодер, угол поворота самой створки и некоторой точки на ней, находящейся также в плоскости, участвующей в створении ворот.
Реализовав на основании данных со всех энкодеров математическую модель способа получаем возможность изменения подаваемых на двигатели насосов пневмопоршней сигнал. Это дает автоматизированную регулировку скорости движения каждой из створок непосредственно в процессе створения, без остановок. Таким образом, создаются наиболее пригодные, на сегодняшний день, условия для безударного створения ворот. При достаточной аппаратной мощности вычислительного устройства появляется возможность графически моделировать процесс створения ворот в режиме реального времени.
Для определения в пространстве створки двустворчатых ворот шлюза пользуемся сферической системой координат. Началом координат является центр вращения вереяльного столба при его наклоне. Азимутальный угол будет соответствовать углу поворота створки в данный момент времени. Это обусловлено наличием крутящего момента на вереяльном столбе, что ограничивает перемещения всякой точки створки в направлениях, отличных от горизонтального поворота, окружностью, лежащей в лицевой или параллельной ей плоскости.
Ниже представлены условные схемы расположения на створке и взаимного положения датчиков, а также геометрически обозначены искомые углы γ и θ. Угол θ соответствует углу наклона створки при расслаблении гальсбанта.
Схематичное изображение створки с датчиками, установленными согласно рассматриваемому методу
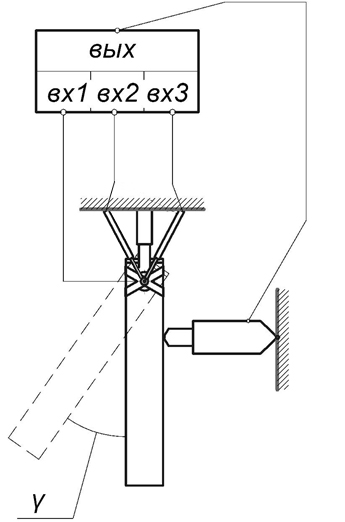
γ - угол поворота створки относительно створенного состояния.
Рис. 1
Реализация рассматриваемого метода, вид слева
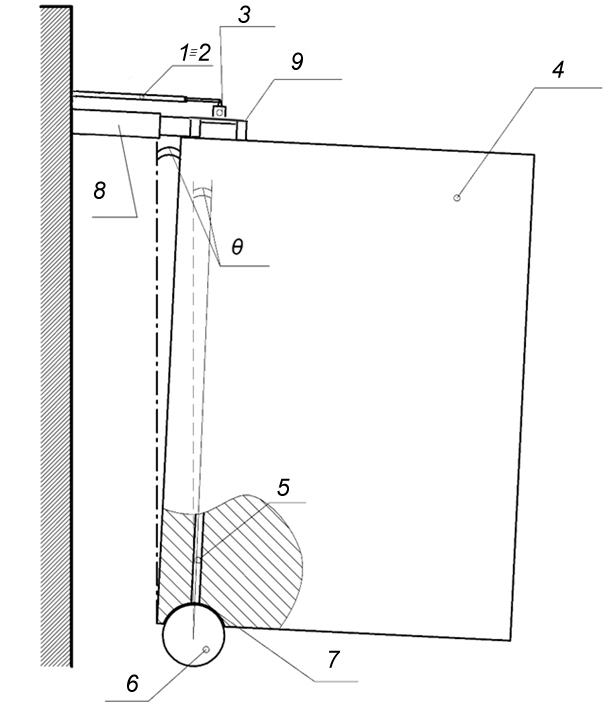
1 – абсолютные линейные энкодеры, 2 – абсолютный угловой энкодер,
3 – створка двустворчатых ворот шлюза, 4 – вереяльный столб,
5 – неподвижный подпятник, 6 – пята, 7 – гальсбант, 8 – штанговое крепление
Рис. 2
Визуальное представление некоторых используемых констант
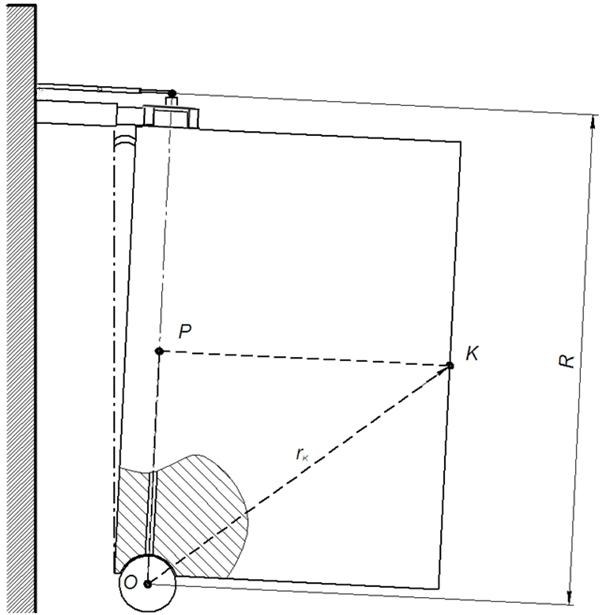
Рис. 3
Из рис. 2 видно, что наклон створки вызывает изменение длины абсолютного линейного энкодера.
Следует учитывать, что используется сферическая система координат с нулевой точкой в центре вертикального вращения створки, который находится по центру подпятника (может отличаться в зависимости от конструкции створки).
Положение створки ворот в пространстве определяется на основании угла поворота, который определяется как показания абсолютного углового энкодера, а также рассчитанного в любой момент времени на основе выходных сигналов линейных энкодеров угла наклона створки. Этот расчет производится согласно выражению:

где d1, d2 - длины первого и второго абсолютных линейных энкодеров в данный момент времени; d10, d20 - длины первого и второго абсолютных линейных энкодеров в створенном состоянии ворот, замеряется один раз перед запуском всей системы позиционирования, по окончании установочных работ; s – расстоянии между соединения со стеной их корпусов; c – расстояние от точки, образованной при пересечении отрезка s высотой треугольника, образованного s, d1 и d2; R – обозначенное на рис. 3 за R расстояние.
Для оценки точности метода следует обратиться к определению абсолютной и относительной его погрешности.
Подставив в выражение (1) константы, соответствующие действительным значениям параметров реального судоходного шлюза, появляется возможность получить представление о изменении погрешностей с одновременным ростом длины d1 и d2. Графически эти изменения представлены на рис. 4 и рис. 5.
Изменение абсолютной погрешности (ось Y) с одновременным ростом d1 и d2 (принято за d, ось X)
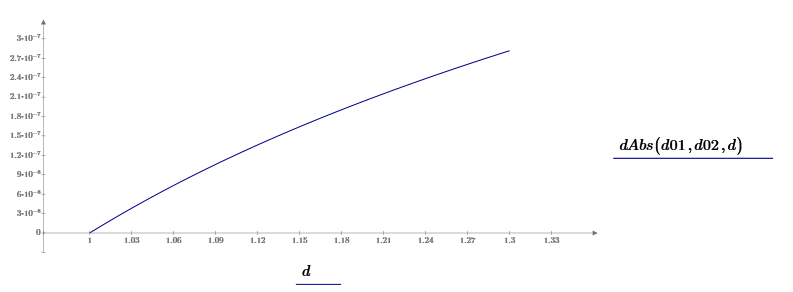
Рис. 4
Изменение относительной погрешности (ось Y) с одновременным ростом d1 и d2 (принято за d, ось X)
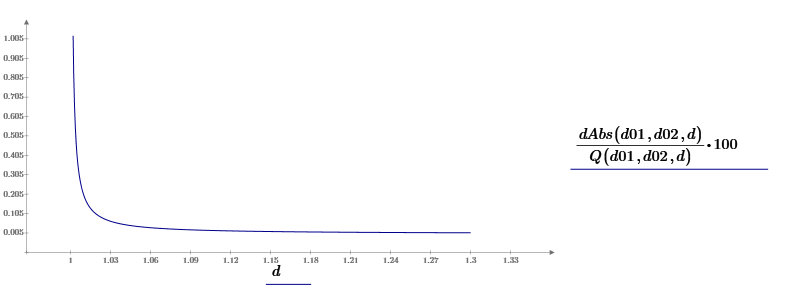
Рис. 5
Сравнивая данный метод с используемыми в настоящее время, можно выделить следующие преимущества нового метода:
- контроль прецессии оси вращения створки;
- резервирование датчиков (при отсутствии сигнала с одного из абсолютных линейных энкодеров система превращается в классическую, определяющую только угол поворота створки без учета наклона вереяльного столба относительно нормального положения);
- возможность графического отображения перемещения ключевых точек створки в реальном времени.
- повышение точности определения в пространстве створок ворот, что позволяет практически во всех случаях безударно створять ворота
Литература
- Попов С.А. "Автоматизация производственных процессов на водном транспорте". -М: Транспорт 1983 г.
- Пат. 2459033С1, Российская Федерация, МПК Е02В 7/20. Способ контроля позиционирования створок двустворчатых ворот шлюза и устройство для его осуществления / Самойлов В.Б.; заявитель и патентообладатель Самойлов В.Б. - № 2011108057/13; заявл. 03.03.2011; опубл. 20.08.2012 г. Бюл. №23.
References
- Popov S.A. "Automation of production processes on water transport." -M: Vehicles 1983
- Patent 2459033S1, the Russian Federation, the IPC E02V 7/20. A method for controlling the positioning flaps of folding gate gateway and device for its implementation / V.B. Samoilov .; applicant and patentee Samoilov V.B. - № 2011108057/13; appl. 03.03.2011; publ. 20.08.2012. Bull. №23.