РАЗРАБОТКА СИСТЕМЫ АВТОНОМНОЙ НАВИГАЦИИ НА ОСНОВЕ ТЕХНОЛОГИЙ ЛИДАРНОГО СКАНИРОВАНИЯ МЕСТНОСТИ И SOFTWARE DEFINED RADIO
Бессмельницин С.А.1, Мамелин Ю.В.2, Чепрасова А.С.3, Якуба Д.Ю.4
1ORCID: 0000-0002-8957-5104, Кубанский государственный университет КубГУ, 2ORCID: 0000-0002-0027-2925, Кубанский государственный университет КубГУ, 3ORCID: 0000-0001-8189-2669, Кубанский государственный университет КубГУ, 4ORCID: 0000-0002-4305-3378, Кубанский государственный университет КубГУ
РАЗРАБОТКА СИСТЕМЫ АВТОНОМНОЙ НАВИГАЦИИ НА ОСНОВЕ ТЕХНОЛОГИЙ ЛИДАРНОГО СКАНИРОВАНИЯ МЕСТНОСТИ И SOFTWARE DEFINED RADIO
Аннотация
Представлено описание разработки главных частей системы автономной навигации робототехнических комплексов, основным компонентом которого является система лидарного сканирования среды видимым оптическим диапазоном частот, а также программно-определяемая радиосистема (software defined radio). Рассмотрены основные рабочие части устройства и объяснён принцип работы отдельных блоков системы лидарного сканирования. Произведен анализ имеющейся элементной базы, который позволил выявить несколько чипов, на базе которых можно построить локационную систему.
Ключевые слова: автоматизация, робототехника, лидар, ПЗС линейка (прибор с зарядовой связью), software defined radio, оптическая система, спектроскопия, ПЛИС.
Bessmelnitsin S.A.1, Mamelin Yu.V.2, Cheprasova A.S.3, YakubaD.Yu.4
1ORCID: 0000-0002-8957-5104, Kuban State University KubSU, 2ORCID: 0000-0002-0027-2925, Kuban State University KubSU, 3ORCID: 0000-0001-8189-2669, Kuban State University KubSU, 4ORCID: 0000-0002-4305-3378, Kuban State University KubSU
DEVELOPMENT OF SELF-NAVIGATION SYSTEM BASED ON LIDAR LOCATION SCANNING TECHNOLOGIES TECHNOLOGY AND SOFTWARE DEFINED RADIO
Abstract
The article contains the description of the main parts of self-navigation system of robotic complexes, the main component of which is the lidar scanning system of the environment with an optical frequency band, and a software defined radio. The main working parts of the device are examined and the operating principle of the individual units of the lidar scanning system is explained. Analysis of the existing elemental base was carried out. It allowed revealing several chips which enable building a location system.
Keywords: automation, robotics, lidar, CCD ruler (charge-coupled device), software defined radio, optical system, spectroscopy, FPGA.
Сегодня мобильные робототехнические системы применяются в самых различных областях человеческой жизнедеятельности. Заводы нуждаются в различных многофункциональных робототехнических комплексах, а люди активно приобретают роботов для развлечения и удобства в быту. Также робототехнические системы широко применяются в службах спасения и стоят на вооружении множества стран мира.
Хотя робототехнические комплексы уже разрабатываются не одно десятилетие до сих пор основной проблемой всех ныне существующих автономных роботов, которые перемещаются самостоятельно, без управления со стороны человека, остаётся навигация. Яркий пример этому ежегодный конкурс DARPA Robotics Challenge, где роботы не могут выполнить простой для человека набор действий, открыть дверь, сесть в машину и т.д. Они промахиваются мимо дверных ручек, не различают всех предметов вокруг. Для обеспечения навигации в пространстве бортовому компьютеру робототехнического комплекса необходимо уметь строить оптимальный маршрут, управлять параметрами движения, правильно интерпретировать информацию об окружающей среде получаемую от датчиков, и постоянно отслеживать собственные координаты [1].
Проблемы автономной навигации робототехнических средств сегодня решаются использованием различных устройств радарного сканирования среды, которые позволяют определять их положения в пространстве относительно других объектов, вычислять расстояние до них и предсказывать возможные столкновения с этими объектами. Подобные устройства радарного сканирования производятся такими ведущими компаниями как: Velodyne, SICK AG, Riegl, Hokuyo и др. Однако, ни одна из представленных компаний не может дать рынку устройство, которое обеспечит безопасность робота как на дальней дистанции, так и на ближней, так как устройства каждой компании имеют ряд недостатков: недостаточный угол обзора, высокая стоимость продукта и большие габариты конечного прибора. Все эти недостатки приводят к тому, что для охвата всех мёртвых зон робота приходится использовать до пяти устройств сканирования среды. Это значительно увеличивает стоимость робототехнического устройства. Оптимальным решением представленной проблемы может быть использование совокупности технологий программно-определяемой радиосистемы и технологии лидарного сканирования среды с физическим распараллеливанием каналов обработки информации.
Устройство лидарного сканирования среды с физическим распараллеливанием обработки информации выступает как основной элемент сканирования среды на ближнем и среднем расстоянии относительно робототехнического устройства. В основе работы этого устройства лежит уникальная оптическая система подсветки поверхности (ОСПП), (рис. 1) в которой применяются лазерные диоды различных длин волн и спроектированные специальным образом линзы, что позволяет получить на выходе из оптической системы градиентное излучение, которое позволит получить подробную спектральную характеристику об окружающей среде, определить цвет поверхности, а также позволит повысить точность определения расстояния до поверхности.
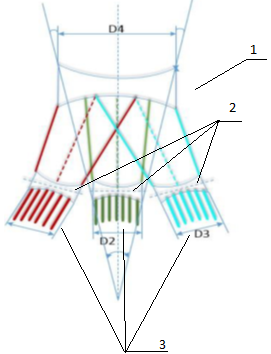
Рис. 1 – Блок схема оптической системы подсветки поверхности
Использование систем оптических линз позволит нам не только сфокусировать три разных излучения в одно, но и получить единое узконаправленное излучение, которое расходится на некоторый небольшой угол. Преимущество такого приема заключается в том, что рассматриваемая поверхность будет подсвечиваться не одной точкой, а пятном, что позволит определять за одно измерение расстояние, сразу до тысячи точек. Основными компонентами данной оптической системы являются линзы рассчитанные так, чтобы на выходе из главной оптической линзы получалось градиентное пятно с расходимостью пучка , а вспомогательные линзы необходимы для того чтобы максимальным образом фокусировать излучение от лазерных диодов.
В качестве основного элемента блока регистрации была выбрана ПЗС линейка (матрица), особенность которой в том, что регистрируемый ей сигнал представлен не напряжением или током, а зарядом.
Спектральные характеристики определяются зависимостью регистрируемой длины волны лазерного излучения от выходного сигнала, что равносильно квантовому выходу [2]. Спектральная характеристика приборов с зарядовой связью определяется умножением таких факторов как: прохождение света в электронную структуру и фотогенирацией.
Фотогенерация вызвана поглощением света непосредственно в полупроводнике (внутренний квантовый выход).
Квантовая эффективность — это и есть квантовый выход светорегистрирующей части приемника, прямопропорционально зависящий от коэффициетна преобразования заряда фотоэлектрона. В силу того, что этот коэффициент всегда меньше единицы, то и квантовая эффективность меньше квантового выхода. Особенно велико это различие для приборов с низкоэффективной системой регистрации сигнала.
Квантовая эффективность современных ПЗС-матриц много выше всех своих конкурентов. Если сравнить с человеческим зрачком, то из ста фотонов попадающих на него, сетчаткой воспринимается только один (квантовый выход равен 1%), квантовая эффективность наилучших фотоэмульсий равна 2-3%, электровакуумные приборы (например, фотоумножители) могут достигать показателей до 20%, у некоторых приборов с зарядовой связью этот параметр достигает 95%, а у большинства этот параметр составляет от 4% до 50%. Кроме того, ширина диапазона длин волн, на которые реагирует глаз, гораздо меньше, чем у ПЗС. ПЗС матрицы реагируют на свет с длиной волн от единиц ангстрем (гамма и рентгеновское излучение) до 1100 нм (ИК-излучение). Это огромный диапазон, который намного больше спектрального диапазона любого другого детектора, используемого в настоящее время (рис. 2).

Рис. 2 – Пример квантовой эффективности ПЗС-матрицы
Другим преимуществом использования ПЗС матриц является их спектральная чувствительность, которая примерно совпадает с человеческим глазом (рис. 3).
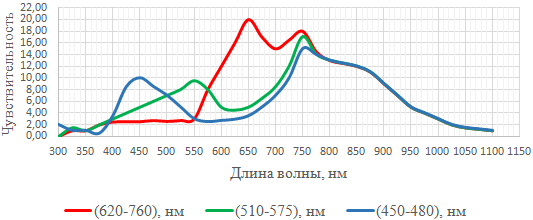
Рис. 3 – Пример спектральной чувствительности цветной ПЗС-матрицы с RGB стандартными полосами
Главной отличительной характеристикой ПЗС является свойство самосканирования. Суть данного свойства состоит в том, что для управления цепочкой затворов любой длины достаточно всего трёх проводников, по которым передаётся смещённое по фазе напряжение. Задачи этих трех проводников следующие: один – передающий, второй – принимающий и третий – изолирующий. Изолирующий предназначен для того чтобы разделять пары принимающих или передающих друг от друга, причём одноимённые электроды таких троек могут быть соединены друг с другом в единую тактовую шину, требующую всего одного внешнего вывода.
На основе этих знаний можно сказать, что использование ПЗС линейки или матрицы позволит собрать сканирующие устройство окружающей местности, которое будет способно реагировать на изменения со скоростью выше 3 нс, также становится очевиден тот факт, что использование ПЗС линейки позволит определять цвет и рельеф поверхности. Стоит вопрос только в том, чтобы разработать такой аналогово-цифровой преобразователь, который позволит осуществлять приём информации об окружающем пространстве не увеличивая задержку.
Также остается открытым вопрос о том, как закрыть мертвые зоны представленного устройства. Которые находятся непосредственно под роботом, с его боков и конечно на дальнем расстоянии где действие лидара уже имеет сбой и высока вероятность получения ошибки вычислений.
С этой задачей позволит справиться программно-определяемая радиосистема. В классическом представлении программно-определяемая радиосистема (Software Defined Radio, SDR) представляет собой центральный процессор (или протокольный процессор, ПП), оснащенный приемным и передающим блоками. Программно-определяемые радиосистемы могут быть реализованы как на вычислительных средствах общего назначения, так и на современных программируемых логических интегральных схемах (ПЛИС), что позволяет создавать радиосистемы на кристалле. При этом за пределы ПЛИС выносятся радиоинтерфейсы, а также АЦП и ЦАП. Применение ПЛИС не приводит к снижению гибкости системы, поскольку ПЛИС могут быть в любой момент полностью или частично перепрограммированы.
В качестве элементной базы, рассматривались несколько чипов стоимостью до 50$:
- Elonics E4000 диапазон рабочих частот: 52 – 2200 МГц
- Rafael Micro R820T диапазон рабочих частот: 24 – 1766 МГц
- Fitipower FC0013 диапазон рабочих частот: 22 – 1100 МГц
- Fitipower FC0012 диапазон рабочих частот: 22 – 948.6 МГц
- FCI FC2580 диапазон рабочих частот, 146 – 308 МГц и 438 – 924 МГц
Данные чипы рассматривались так как используемая нами система SDR работает в пассивном режиме, отсюда следует, что главной характеристикой чипов для данной цели будет большой диапазон принимаемых частот.
Очевидно, что Elonics E4000 и Rafael Micro R820, имеют самый большой диапазон частот, с которыми могут работать, поэтому они были выбраны для дальнейшей работы. Исследование чипов проводилось непосредственно экспериментальным путем. В процессе исследований, было выяснено, что Elonics E4000 имеет проблемы с надежностью. Из трех исследованных чипов, два вышли из строя на этапе первичной настройки. Также были выявлены некоторые трудности с возможностью аппаратной синхронизации этих чипов, и поэтому было решено отказаться от их использования, в пользу Rafael Micro R820.
Проведя исследование возможностей выбранной ПЗС, обозначились основные требования к источнику сканирующего сигнала:
- Знание точной частоты вещания передатчика
- Достаточная мощность источника
- Максимальная зона покрытия
Изучив доступный диапазон частот (24 – 1766 МГц), был сделан вывод, что лучше всего под заданные условия подходит GSM и TV-FM сигнал. При дальнейшем изучении, выяснилось, что TV-FM сигнал имеет ряд преимуществ перед GSM сигналом и предпочтительнее в использовании. Так как информация о частотах вещания находится в общем доступе, что позволяет точно настроится, мощность сигнала достаточно высокая, а также зона покрытия больше чем у GSM, что позволяет использовать его для построения радарограмм пространства. А совместное использование с системой лидарного сканирования местности позволит получать полноценную картину окружающего мира с возможностью построения оптимального маршрута до цели и маневрирования среды движущихся препятствий.
Таким образом при разработке отдельных частей системы сканирования окружающей среды было выявлено, что подсветка поверхности может осуществляться лазерным излучением видимого диапазона частот, но при условии, что энергия такого излучения без вреда живым организмам не должна превышать 22 мк Дж, чего недостаточно для работы лидара в диапазоне ста метров вокруг своей оси при том условии, что фотоприёмником является ПЗС линейка или матрица. Но вполне достаточно чтобы получать информацию об окружающей среде с высоким разрешением в диапазоне тридцати метров.
Разработана оптическая система, которая позволяет получить на выходе из оптической системы не три разрозненных луча, а градиентное излучение, которое объединяет в себе длины волн всех используемых лазерных диодов. Применение этого излучения в работе представленного устройства играет большую роль. По той причине, что предложенные алгоритмы определения расстояния были бы неэффективны в силу хаотичного отражения луча от криволинейной поверхности. Так как излучение подсвечивающее поверхность градиентно и в разных точках относительно центра излучения имеет разный набор длин волн и интенсивности позволяет нам разбить его на сегменты. И сравнивая энергию зарегистрированного излучения на ПЗС и исходных данных определяем с точностью 90% какой сегмент нашего излучения каким пикселем линейки был зарегистрирован.
Было выявлено что, для регистрации отражённого излучения с небольшой энергией вполне подходит использование приборов с зарядовой связью, более того квантовая эффективность этих устройств выше чем у многих других аналогичных датчиков.
Список литературы / References
- Головастов А. Машинное зрение и цифровая обработка изображений / А. Головастов // Современные технологии автоматизации, Москва, СТА-ПРЕСС 2010, Аппаратные средства. – 2010. – №4. С. 8.
- Параскевов А.В., Левченко А.В. Современная робототехника в россии: реалии и перспективы (обзор) / А.В. Параскевов, А.В. Левченко // Научный журнал КубГАУ. Физика. Робототехника. – 2014. – №104. – с. 10.
Список литературы на английском языке / References in English
- Golovastov A. Mashinnoe zrenie i cifrovaja obrabotka izobrazhenij [Machine vision and digital image processing] / A. Golovastov // Sovremennye tehnologii avtomatizacii, Moskva, STA-PRESS 2010, Apparatnye sredstva [ Modern automation technologies, Moscow, STA-PRESS 2010, Hardware.] – 2010. – №4. P. 8. [in Russian]
- Paraskevov A.V., Levchenko A.V. Sovremennaja robototehnika v rossii: realii i perspektivy (obzor) [Modern robotics in Russia: realities and prospects (overview)] / A.V. Paraskevov, A.V. Levchenko // Nauchnyj zhurnal KubGAU. Fizika. Robototehnika.[ Scientific journal of KubSU. Physics. Robotics] – 2014. – №104. – p. 10. [in Russian]